









系统概述
系统构建智能网联毫米波雷达多目标多维度半实物仿真环境。
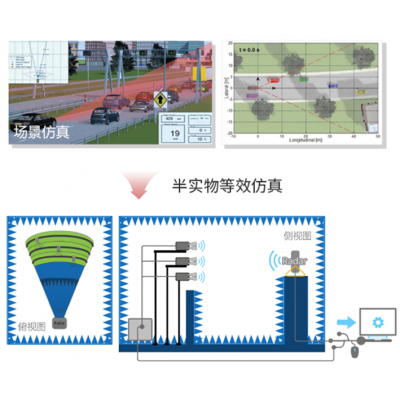
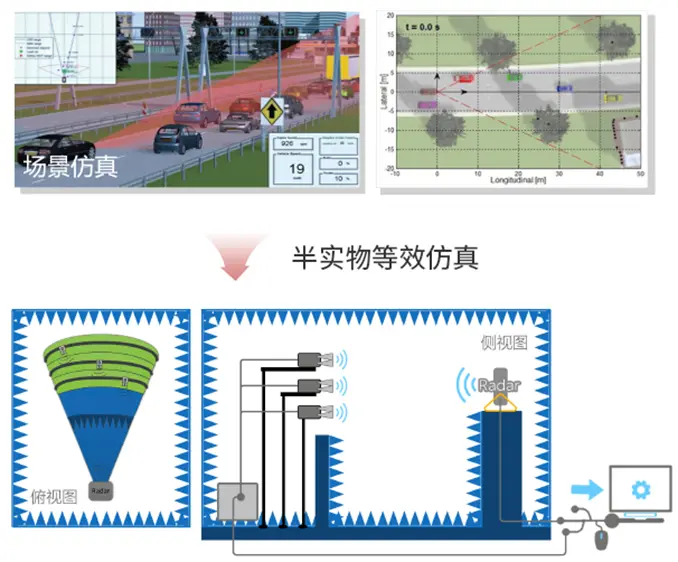
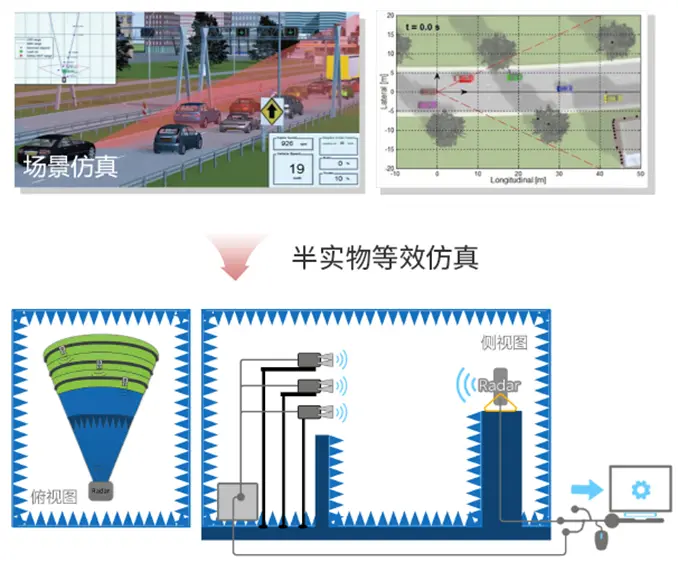
针对车载毫米波雷达进行目标仿真测试,构建虚拟交通场景仿真,采用等效缩比模型模拟目标为毫米波雷达的研制、仿真验证提供支撑条件
系统图片

系统组成
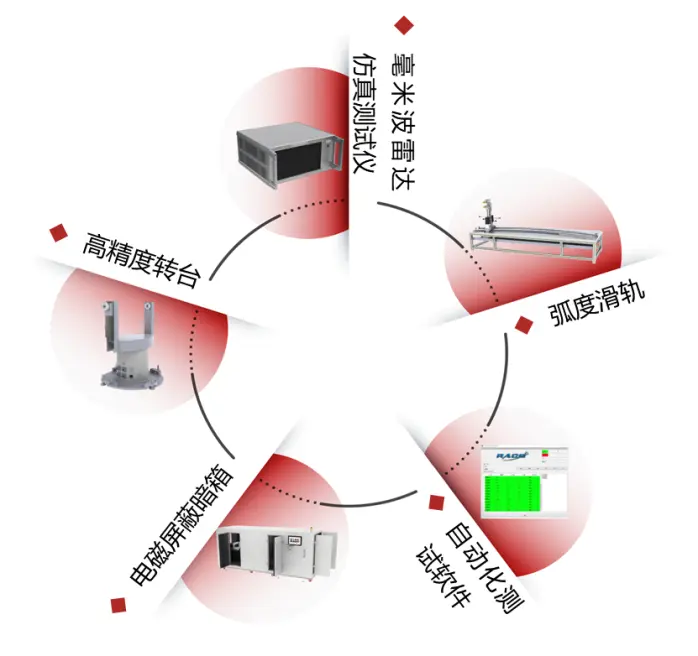
暗室、转台、滑轨、软件、模拟器
系统特点
系统原理
系统功能
● 提供集成的屏蔽暗室环境
● 具备虚拟交通场景的构建功能
● 具备虚拟交通场景的仿真功能
● 具备多目标回波模拟功能,包括目标距离、速度、RCS模拟
● 具备不同角度目标回波模拟功能
● 实现毫米波雷达频率、带宽、平坦度、发射杂散等射频指标测试
● 实现毫米波雷达天线方向图测试
● 实现毫米波雷达感知性能范围测试
● 实现毫米波雷达感知性能精度测试
● 实现毫米波雷达分辨能力测试
● 实现毫米波雷达抗干扰性能评估测试
● 提供集成的一体化控制功能,方便系统的仿真及自动化测试
系统指标
可针对24G、60G、77G雷达(车载、室内、路侧、交通等)完成以下测试项:
|
序号 |
测试类型 |
测试项目 |
|
1 |
射频及天线 |
工作频率范围 |
|
2 |
发射EIRP |
|
|
3 |
信号带宽 |
|
|
4 |
发射方向图 |
|
|
5 |
发射机杂散 |
|
|
6 |
幅度平坦度 |
|
|
7 |
调制斜率 |
|
|
8 |
调制脉宽 |
|
|
9 |
调制周期 |
|
|
10 |
感知性能 |
速度范围 |
|
11 |
距离范围 |
|
|
12 |
方位角度范围 |
|
|
13 |
俯仰角度范围 |
|
|
14 |
威力范围 |
|
|
15 |
感知精度 |
速度精度 |
|
16 |
距离精度 |
|
|
17 |
方位角度精度 |
|
|
18 |
俯仰角度精度 |
|
|
19 |
分辨能力 |
距离分辨率 |
|
20 |
速度分辨率 |
|
|
21 |
方位角度分辨率 |
|
|
22 |
俯仰角度分辨率 |
|
|
23 |
感知准确度 |
探测率 |
|
24 |
漏检率 |
|
|
25 |
虚警率 |
|
|
26 |
场景仿真 |
场景编辑 |
|
27 |
场景模拟 |
|
|
28 |
场景库 |
|
|
29 |
电性能 |
功耗、电压、电流 |
应用场景
雷达研发测试