




 广告
广告





















































中汽学会青委会【委员观点】熊璐:自动驾驶汽车测试技术研究与应用进展
2018-12-27 22:42:03· 来源:熊璐 中汽学会青委会


第二期【委员观点】嘉宾:熊璐,1978年10月出生,工学博士、教授、博士生导师,德国斯图加特大学博士后,美国伊利诺伊州立大学香槟分校(UIUC)访问学者。现任同济大学汽车学院教授、同济大学新能源汽车工程中心副主任、中国汽车工程学会青年工作委员会副主任委员。
长期从事汽车底盘控制、分布式驱动电动汽车动力学控制、智能驾驶相关科研工作,主持和参与国家重点研发计划项目、国家自然科学基金项目、973计划、863计划和国家支撑计划等多项国家和省部级项目;发表SCI/EI论文70余篇,授权专利40余项,参撰英文著作2部;曾获上海市科技进步一等奖、上海市科技进步三等奖、中国汽车工业科技进步三等奖以及上海国际工业博览会高校展区一等奖、上海市国际工业博览创新奖等多项奖励;担任多个国内外著名期刊的评审专家,任中国汽车工程学会汽车智能交通分会副秘书长、中国自动化学会车辆控制与智能化专委会委员、中国公路学会自动驾驶工作委员会委员、上海市汽车工程学会可靠性专委会委员。
摘要:测试技术是支撑自动驾驶技术发展的重要基础。文章针对高级自动驾驶汽车的决策规划、环境感知等测试需求,从测试方法、测试工具以及测试加速三个方面,系统总结了自动驾驶汽车测试技术研究与应用现状,深入分析了其应用特点和适用范围,并指出了自动驾驶汽车测试技术的未来发展方向。
自动驾驶汽车测试与评价是自动驾驶研发中的重要环节,是自动驾驶技术发展的重要支撑。伴随高级驾驶辅助系统(Advanced Driver-Assistance Systems,ADAS)和高等级自动驾驶系统(SAE L3-L5,如表1)的开发和应用,产生了很多新的测试验证需求。
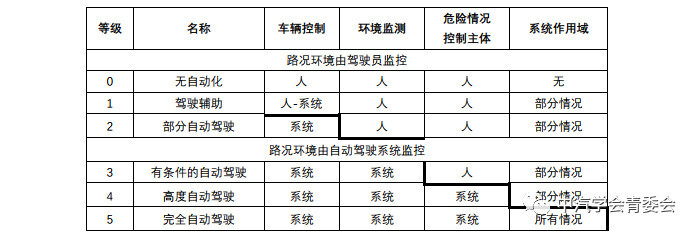 表1 SAE自动驾驶功能分级
表1 SAE自动驾驶功能分级SAE autonomy level for self-driving car
按照传统测试思路,采用预先设定的用例进行测试将很难满足自动驾驶功能的测试需求。面对新问题,学者们从多个方面开展了自动驾驶汽车测试技术的研究工作,总结归纳为以下三个方面:
(1)测试方法,即满足特定功能需求的具体测试方案;
(2)测试工具,即满足特定环境需求的测试设备和平台;
(3)测试加速,即能够提高测试效率的方法和手段。
接下来本文将从以上三方对自动驾驶汽车测试技术的研究现状进行阐述,并分析不同测试方法、测试工具和测试加速的适用范围及其局限。
1 测试方法
测试方法主要指测试内容的组织形式以及开展测试的途径。就自动驾驶功能的特点而言,在车辆进入完全自动驾驶状态后,其一切行为均是系统自主决策的结果,因此测试方法必须提供车辆自主决策的自由度,保证其性能得到体现;但从测试的可重复性、可控性等需求出发,又希望测试对象是在特定条件下测试的。按照上述两方面的需求,按照测试方法对测试输入和测试过程要求的不同,可以将测试方法分为基于用例的测试方法、基于场景的测试方法和公共道路测试方法。
1.1 基于用例的测试方法
基于用例的测试方法是通过预先定义的测试用例,测试车辆的某项功能是否满足特定条件下需求的方法。测试用例指是为某个特殊目标而编制的一组测试输入、执行条件以及预期结果,以便测试某个程序路径或核实是否满足某个特定需求[1] 。该方法的一个特点是对测试过程和测试结果有明确的要求,如图1对AEB的测试,车辆必须在不同条件下通过制动避免与障碍物发生碰撞,来证明功能有效。
基于用例的测试主要适用于功能相对单一,并且有明确应用条件和预期结果的各类功能测试与验证。主动安全和ADAS功能的测试,以及自动驾驶开发阶段的单项功能测试,均可应用基于用例的测试方法。由于测试输入、测试条件和结果明确且可控,因此该方法的测试可重复性强,测试效率高。对于测试输入和测试条件的确定,目前主要依赖危险数据、事故数据、理论分析以及模拟实验数据的分析,但是前期的数据采集和分析成本相对较高,且获得的数据存在局限性。该方法应用于功能相对复杂和综合的自动驾驶系统存在一定不足,首先体现在该方法只能对某项功能进行测试,而无法测试多项功能的综合表现;其次由于对测试结果有着明确的要求,系统自主决策能力难以体现。
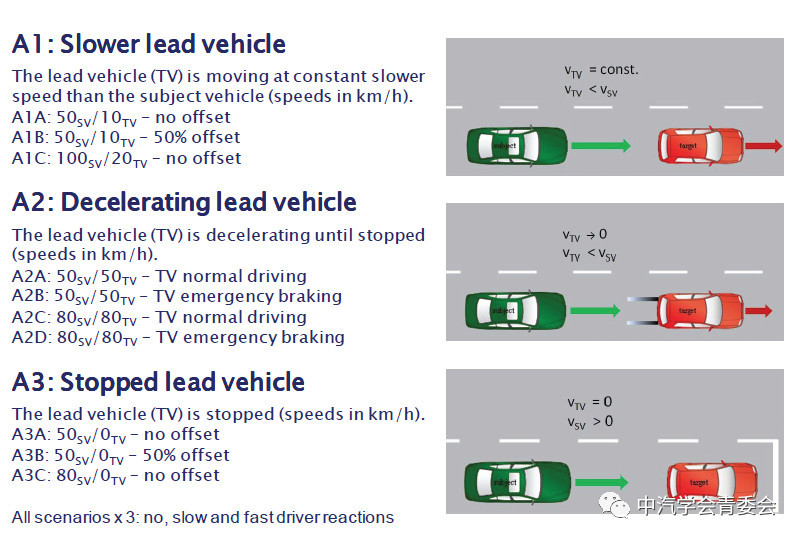
图1 ASSESS 项目中AEB功能测试用例描述
AEB functional test cases definitions in ASSESS project
1.2 基于场景的测试方法
基于场景的测试方法是通过预先设定的场景,要求车辆完成某项特定目标或任务来对系统进行测试的方法。场景描述了特定时间段内发生的事件过程,目前暂未形成场景的确切定义,但一般将场景理解为多个事件顺序发生构成的序列,并会延续一段时间,或简单理解为事件的剧本,描述一定空间和时间范围内的所有环境、交通参与者的状态、行为过程及目的,图2展示了一个典型的多车交互场景。该方法的特点在于对测试结果没有明确要求,在不违背给定目标或任务的情况下,系统可以自主选择采取何种方式处理当前状况,具有很高的自由度。
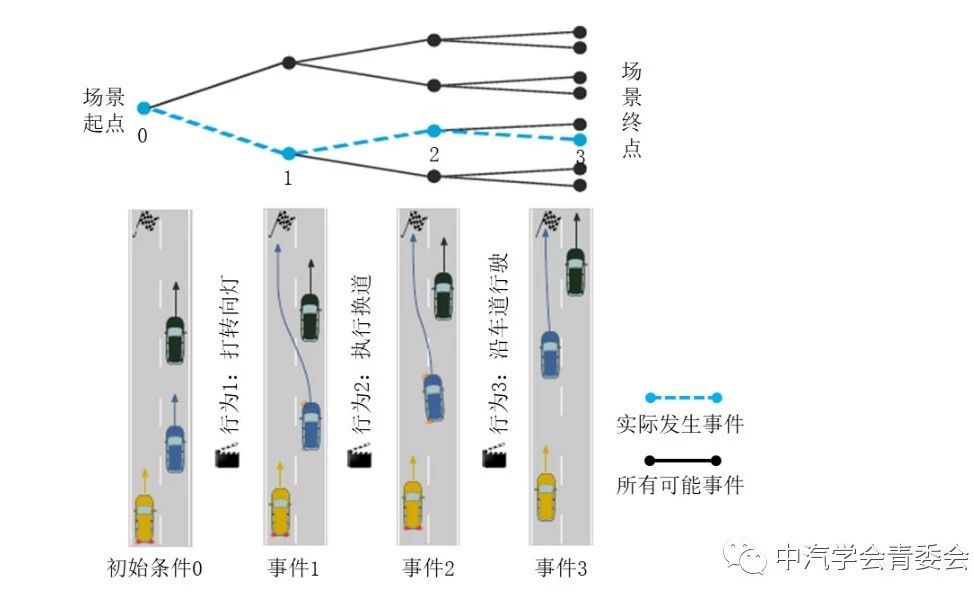
图2 换道场景示意图
Brief description for lanechange scenario
在场景测试的应用方面,欧盟近几年开展的研究项目集中解决场景测试方法和技术,在最近开展的PEGASUS[2]项目中,为解决场景测试的测试输入问题,研究者对项目进行了定义和分级(图3),包括功能场景、逻辑场景和具体场景,从而形成场景测试的初始条件,作为自动驾驶车辆的起始工况。
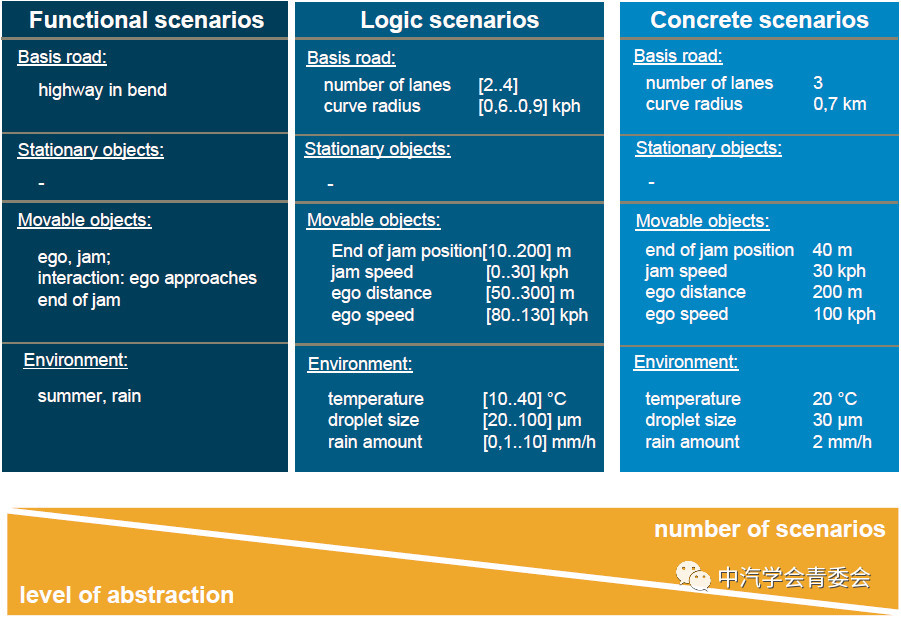
图3 PEGASUS项目中对测试场景的定义
Test scenario definitionin PEGASUS project
场景测试的优势在于该方法只规定了测试的初始条件,不预先设定测试过程以及测试结果,可以提供系统自主决策的自由度,能够对系统多种功能的综合性能进行测试,因此更适应高级别自动驾驶系统的测试需求。但为了能够满足多种环境感知传感器的测试需求,同时提供系统决策所需的自由度,测试场景的设计势必更加复杂,环境要素更加丰富,因此测试场景的构建是该方法的一大挑战。同用例测试类似,场景测试方法同样需要分析多种来源数据以确定测试场景的内容以及测试初始条件,场景采集和分析的成本较高,目前主要通过自然驾驶数据、事故数据的研究,同时也可以从大量的模拟实验数据中寻找典型场景,理论分析也是一种很重要的场景获得手段[3]。
1.3 公共道路测试
公共道路测试即指在现实道路和真实交通环境下开展的测试。该方法与上述两种方法相比存在特殊性,主要体现在该方法是结合特定测试环境的专用测试方法,无法推广到其他测试工具上使用。公共道路可以提供完全真实的、非人工模拟的交通场景,所有交通参与者、气候条件、道路条件都真实存在,不受人为控制。由于所有事件均是随机发生的,因此测试中无法预先设定测试初始条件,车辆在公共道路行驶的过程均是测试过程,从而对自动驾驶系统提出了更高的要求。
公共道路测试能够提供真实的交通环境,满足环境感知系统、决策规划系统的测试需求,理论上是进行自动驾驶测试的最佳方式。该方法的主要不足在于测试周期长,效率低,测试成本巨大,同时必须考虑安全风险问题以及法律法规的限制。从统计学角度出发,要验证自动驾驶汽车比人类驾驶更安全,理论上应至少进行99000000英里以上的公共道路测试[4],这是一个无比巨大的测试里程。因此,单纯依靠公共道路测试自动驾驶系统并不具备可操作性。
2 测试工具
测试工具可以满足不同测试阶段、不同测试环境需求的测试,一些测试工具的采用可以大大提高测试的可重复性、降低风险,同时便于数据的采集。根据测试环境的真实程度或者实际在环硬件的数量不同,可以分为:虚拟仿真测试、硬件在环测试、整车在环测试和封闭场地测试不同的测试方法可以结合不同的测试工具使用。
2.1 虚拟仿真测试
虚拟仿真测试是纯数字仿真测试工具,由模拟场景、车辆动力学模型、传感器模型、规划决策算法等组成,可以对自动驾驶汽车的各个系统以及整车进行仿真测试。虚拟仿真测试一般应用在功能开发早期阶段,在没有实物硬件的情况下,对系统的策略算法进行验证。
虚拟仿真测试可以摆脱对真实测试环境和硬件的需求,测试效率极高,测试成本和测试风险非常低。虚拟仿真测试的主要问题在于,其测试结果严重依赖于传感器模型和车辆模型的准确性,不准确或错误的仿真模型将导致错误的结果;另一方面,如何实现现实场景在仿真环境中快速还原也是挑战之一,为了应对该问题,欧盟在PEGASUS项目中开发了一种场景记录文件格式OpenScenario[5],可以将采集的场景数据生成场景文件并应用于不同的模拟仿真软件。
2.2 硬件在环测试
硬件在环测试中,自动驾驶系统的部分部件或系统是真实的,而环境是虚拟的。自动驾驶汽车的环境感知系统、决策规划系统和控制执行系统均可实现硬件在环测试。
摄像头在环测试是比较容易实现的测试系统,如图4所示,将被测摄像头放置在显示场景的屏幕前,并构建摄像头测试黑箱,测试摄像头在不同场景下的感知与认知能力[6]。超声波雷达硬件在环测试则需要专门的目标物超声波信号模拟设备,对不同的车辆和障碍物的雷达波反射特性进行模拟,形成被测超声波雷达的回波信号[7]。而将不同的部件或系统进行整合,可以构建硬件在环集成测试系统。

图4 摄像头硬件在环仿真测试黑箱
Virtual test use camerahardware-in-the-loop test system
理论上大部分硬件均可开展硬件在环测试,但部分硬件的在环测试技术手段相对复杂且成本很高,如激光雷达、红外摄像头等;还有部分部件开展在环测试的意义不大,如决策规划系统硬件在环测试,即虽然系统最终以硬件呈现,但功能主要由软件体现,因此较少有研究机构开展相关工作,总体来说,硬件在环测试的应用范围仍比较有限。
2.3 整车在环测试
整车在环测试中,整车作为实物硬件被连接到虚拟的测试环境中进行测试,是比硬件在环测试更加复杂的测试工具。将所有部件、系统集成到车辆上进行测试,可以降低模型偏差带来的不良影响,使测试结果更加可靠。整车在环测试目前有两种方案,其特点和满足的测试需求各不相同。
2.3.1 封闭场地车辆在环测试
车辆在封闭的空旷场地进行测试,场景仿真系统生成虚拟场景,由传感器模型和传感器信号模拟软件生成基于虚拟场景的传感器信号,并发送给车辆ECU,ECU根据环境感知数据进行决策规划和控制执行任务,同时场景模拟软件读取车辆GPS及航向信息用于更新参数,并根据新的位置信息给出传感器模拟信号,如此往复。
2.3.2 转鼓平台车辆在环测试
荷兰国家应用科学研究院天欧(TNO)公司研发的转鼓平台车辆在环测试,将装备了传感器的整车置于转鼓平台,其绝对位置是固定不变的,利用机器人运动平台系统,模拟周围交通参与者与被测车辆的相对运动,实现车辆在环测试[8]。该测试系统中,传感器部件均为真实硬件,因此测试结果更加可靠(图5)。

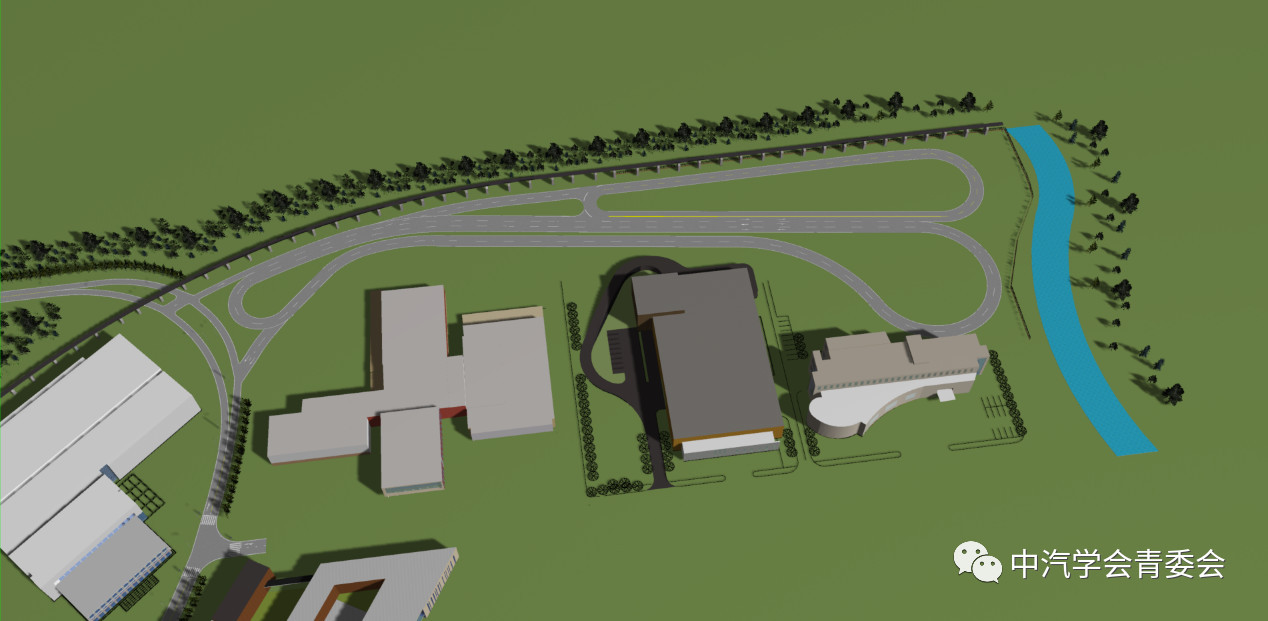
图5 TNO转鼓平台车辆在环测试实验室
Vehicle-in-the-loop test bench
以上两种在环测试方案,在实际中均有应用,但封闭场地车辆在环测试仅仅有车辆是实际硬件,传感器仍依赖于模型,其真实度相比转鼓平台略低,同时,它也不能克服场地受限的问题,对于一些较大尺度的交通场景难以实现。而转鼓平台车辆在环测试由于车辆静止,因此无法考察控制执行系统,而只能模拟车辆间的相对运动关系,对于周围环境变化无法模拟。
2.4 封闭场地测试
封闭场地测试从环境到车辆系统均为实物,封闭场地测试依托于专用的封闭测试场地建设,强调环境和场景的还原和模拟能力,采用柔性化设计,保证自动驾驶车辆能够在有限的场地条件下,尽可能多的经历不同环境、场景的测试。
以同济智能网联汽车测试评价基地为例,作为工信部授权的国内首个智能网联汽车试点示范区——国家智能网联汽车(上海)试点示范区的重要组成之一,同济智能网联汽车测试评价基地的主要定位是面向科学研究和前瞻技术研发。这是我国首个面向智能网联汽车测试目的,而创新规划、全新设计、全面建设,并投入使用的专用测试场地。它涵盖了城市区域、快速路、乡村和越野区域等智能网联汽车典型应用区域,可用于各等级、各类技术方案的自动驾驶汽车的场地测试。
测评基地占地面积约为198亩,铺设道路总长度约为4.5公里;按照功能区块划分为“三区一环”,如图6。
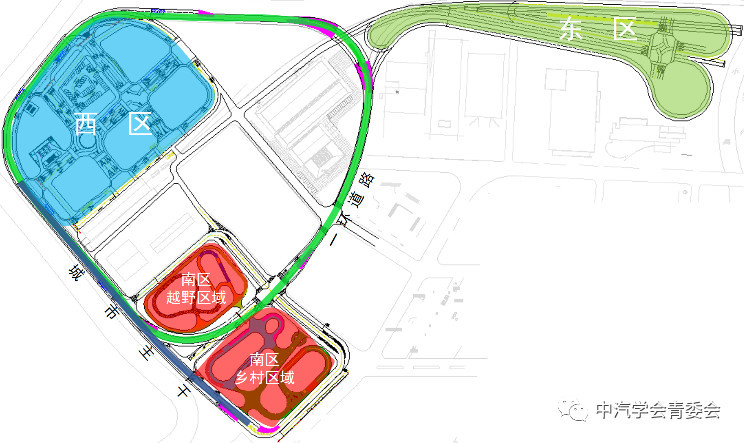
图6 测评基地整体布局
东区场地以长直道和半径较大的弯道组成,以柔性化场地为主要特点;此外,该区域还设置了低附着系数路面和智能车整车在环实验系统(i-VIL)。东区主要提供针对驾驶辅助系统的“标准化测试场景”(图7)。
图7 东区整体布局
西区场地设置了丰富的城市基础设施和道路设施,如智能停车场、加油站等,以及各类典型的交叉口、环岛、主路与支路等,能够还原复杂多变的城市交通场景(图8.a)。

图8.a 西区整体布局

图8.b 南区整体布局
南区主要用于挑战自动驾驶车辆在非结构化道路中的可用性。其中,越野区域为非铺装路面,设置有涉水路、起伏路等特殊路面;而乡村区域的道路则以三级、四级公路和等外道路为主,并设计了低附对开路面、坑洞路面以及可形成盲弯的坡道等特殊道路环境(图8.b)。
一环道路是连接东区、西区和南区的环形道路。作为连续环路,可对车辆的中高速连续运行进行测试。其中的城市主干道上,沿途布置雨雾模拟装置,用于测试车辆在特定天气条件下的性能和表现。
测试基地通过设置基站、路侧节点、智慧信号灯等,能实现整个测试区域的5G、DSRC、LTE-V、WiFi等主要无线通信系统全覆盖,并提供差分GPS和北斗定位系统等高精度定位服务。在信息管控中心的指挥下,远程监控设施可以实时监测实验过程,保障实验安全。

图9 测评基地信息环境布局
封闭场地测试的弊端主要在于测试效率低,存在一定的测试风险。为提高测试效率,车辆一般需要先经过虚拟测试、硬件在环测试等,筛选最为典型和测试价值的场景开展封闭场地测试,降低场地测试的周期。
3 测试加速
测试加速即通过一定手段到达加快测试进程,提高测试效率的目的。随着自动化等级的提高,自动驾驶系统的使用场景和所要应对的情况也随之扩大,从而造成测试用例和测试场景数量的极具上升,因此通过一定手段提高测试效率,以便减低测试周期和成本,是非常必要的。目前,测试加速主要分为测试工具加速和测试过程加速。
3.1 测试工具加速
测试工具加速的出发点在于通过使用效率更高的工具实现加速测试的目的。如本文第二部分所述,虚拟测试工具的使用可以极大提高测试效率,因此在测试工具的使用中应该充分发挥虚拟测试工具的作用。
3.2 测试过程加速
测试过程加速是通过一定手段提高测试执行过程的效率。测试过程加速一般依赖于虚拟测试环境的使用,这主要源于虚拟测试环境的特性,便于实现特殊的测试条件,对测试过程施加影响,因此更容易实现测试过程的加速。密歇根大学Zhao Ding[9]提出的自动驾驶汽车的加速测试理论,基于自然驾驶数据分析,应用重要性抽样等方法,在虚拟测试环境中对危险场景发生的概率进行放大,提高车辆遇到的危险场景的频次,从而实现在相同的测试里程下出现更多的危险场景,测试理想条件下可以缩短测试里程千倍以上。谷歌[19]则通过增加被测对象的数量来加快测试过程,在其搭建的专用虚拟测试环境中,有25000辆自动驾驶汽车不间断行驶进行测试,同样可以实现测试过程的加速。
参考文献:
[1] ISO.IEC. IEEE, Systems and Software Engineering—Vocabulary: ISO/IEC/IEEE24765. Piscataway:IEEE computer society, 2010-12.
[2] PEGASUSjoint project[OL]. PEGASUS, http://www.pegasusprojekt.de/de/, 2017-10.
[3] GeyerS, Baltzer M, Franz B, et al. Concept and development of a unified ontology forgenerating test and use-case catalogues for assisted and automated vehicleguidance[J]. Iet Intelligent Transport Systems, 2013, 8(3):183-189.
[4] Koopman P, Wagner M. Challenges in AutonomousVehicle Testing and Validation[J]. SAE International Journal of TransportationSafety, 2016, 4(1):15-24.
[5] OpenScenario[OL].VIRES Simulations technology GmbH, 2017-09-26. http://www.openscenario.org/project.html
[6] Noth S, Edelbrunner J, Iossifidis I. An integratedarchitecture for the development and assessment of ADAS[C]// International IEEEConference on Intelligent Transportation Systems. IEEE, 2012:347-354.、
[7] Buhren M, Yang B. Simulation of Automotive RadarTarget Lists using a Novel Approach of Object Representation[C]// IntelligentVehicles Symposium. IEEE, 2006:314-319.
[8] Gietelink O J. Design and validation of advanceddriver assistance systems[D]. Delft, Netherlands: Delft University ofTechnology, Trail Research School, 2007.
[9] Zhao D. Accelerated evaluation ofAutomated Vehicles[D]. Michigan, United States: University of Michigan, 2016.







最新资讯
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
-
博世发布突破性电解槽技术
2025-04-02 20:23
-
ESI 全新BM-Stamp软件在汽车行业冲压仿真精
2025-04-02 09:27
-
车辆软件测试工程师的工作内容---解读GBT德
2025-04-02 08:41
-
浅谈机动车检测行业合规经营与检验人员职业
2025-04-02 08:40
