




 广告
广告





















































雷达与激光雷达
2019-01-23 22:11:33· 来源:洞云书屋

对视觉、雷达和激光雷达传感器的需求正在增加,这些传感器能够使汽车具有辅助和自主驾驶能力,但是汽车制造商现在正在向供应商提出一些新的和苛刻的要求。汽车市
对视觉、雷达和激光雷达传感器的需求正在增加,这些传感器能够使汽车具有辅助和自主驾驶能力,但是汽车制造商现在正在向供应商提出一些新的和苛刻的要求。
汽车市场一直是供应商的难题。OEM希望更小、更快、更便宜的设备与先进的驾驶员辅助系统(ADAS)和自主驾驶技术具有相同的或改进的安全水平。一般来说,ADAS涉及汽车的各种安全特性,如自动紧急制动、车道检测和后方目标警告。雷达是一种用于车辆盲点检测和其他安全特征的目标检测技术,是一个很好的例子。“随着时间的推移,雷达模块已经大大缩小了。NXP的产品线经理Thomas Wilson说,热需求越来越难。“所以,性能要求正在上升。尺寸正在下降。而且成本要求也越来越高。今天在汽车中使用的雷达模块是笨拙的系统,包括基于不同过程的多个芯片。但是为了减小尺寸和成本,英飞凌、NXP、Renesas和TI正在向集成雷达芯片组发展,这些芯片组合在同一设备上的各种组件。
雷达芯片组是针对某些应用,但它们指向一种新兴的趋势。IC制造商正在使用45nm和28nm的标准CMOS工艺集成雷达设备,而不是为各种芯片使用不同的工艺。其他工艺选择包括22nm散装和FD-SOI。
另一项技术,LiDAR,正在从庞大的系统向具有更集成组件的小型固态单元转移,以努力降低该技术的高成本。激光雷达(光成像、探测和测距)使用脉冲激光来测量距离。
还有其他动力在起作用。例如,该行业正在开发具有更高分辨率的下一代雷达,此举旨在取代激光雷达。但是激光雷达技术并不是静止不动的。
事实证明,没有一种技术覆盖所有的ADA/Autual需求。今天,一些车辆采用先进的视觉系统和雷达。随着时间的推移,它们也可能包括激光雷达,这意味着各种技术将共存。
每种技术都有其利弊。“激光雷达是一种比雷达更昂贵的系统,但它更准确地识别物体。LiDAR在诸如雪、雨和雾等恶劣天气条件下有其局限性。虽然雷达似乎不受天气条件的影响,但它不能像激光雷达那样精确地确定物体的大小和形状。
为了帮助OEM公司走在曲线的前面,半导体工程公司已经研究了先进的视觉、雷达和激光雷达的发展趋势,以及供应商试图降低成本的方法。
更安全的汽车
汽车制造商正在接受这些安全导向的技术,这是有充分理由的。根据美国国家公路交通安全管理局(U.S.National Highway Traffic Safety.)的统计,94%的严重碰撞是由于驾驶员失误造成的。
因此,多年来,汽车行业在车辆中引入了更多的安全特性。
为此,根据NXP的威尔逊(Wilson)的说法,汽车业正沿着两条平行的路径——新车评估计划(NCAP)和自主技术。为此,根据NXP的威尔逊(Wilson)的说法,汽车业正沿着两条平行的路径——新车评估计划(NCAP)和自主技术。多年来,亚洲、欧洲和美国都推出了NCAP的指导方针。在这个程序中,汽车被测试并根据车辆的安全性给出星级评级。五星级是最高水平,一星级是最低。
“五星评级对汽车销售产生了巨大影响。由于保险费较低,更多的消费者被激励购买五星级汽车。Wilson说,他们也更安全。每个洲都有自己的NCAP标准。但简单来说,根据NXP,基本NCAP标准涉及若干ADAS技术,例如自适应巡航控制、自动紧急制动、交叉口辅助、车道保持辅助等。
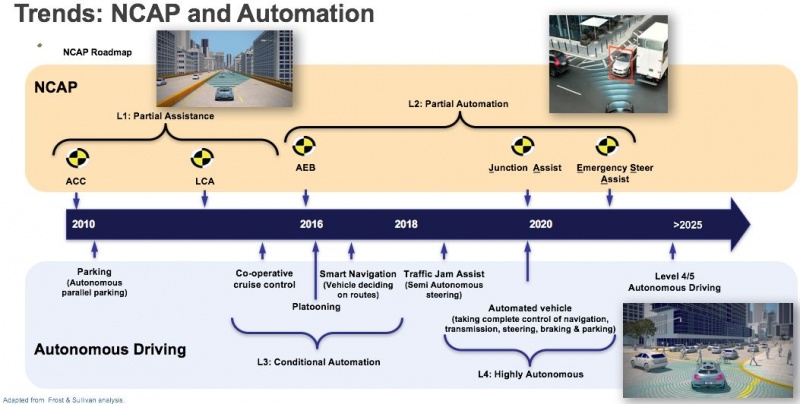
图1:NCAP标准的五星级评级。
在自适应巡航控制中,汽车自动调节其在交通中的速度。自动紧急制动是指车辆在感知到碰撞时自动制动的情况。在车道保持辅助中,汽车将自动防止驾驶员进行不安全的车道变换。然后,在连接辅助中,驾驶员想要进行转弯。如果不安全,汽车就会自动刹车。
NCAP路线图为汽车中需要更多传感器提供了动力。“例如,自动紧急制动将利用相机和雷达,”马克格兰杰说,目前在全球铸造公司的汽车。“这项技术正开始从超豪华转向中层车型。”除此之外,汽车制造商还遵循一条涉及自主驾驶技术的平行路径,这一举措正在推动对相机、激光雷达和雷达的需求。然而,全自动驾驶技术可能无法在十年或更长时间内达到主流。
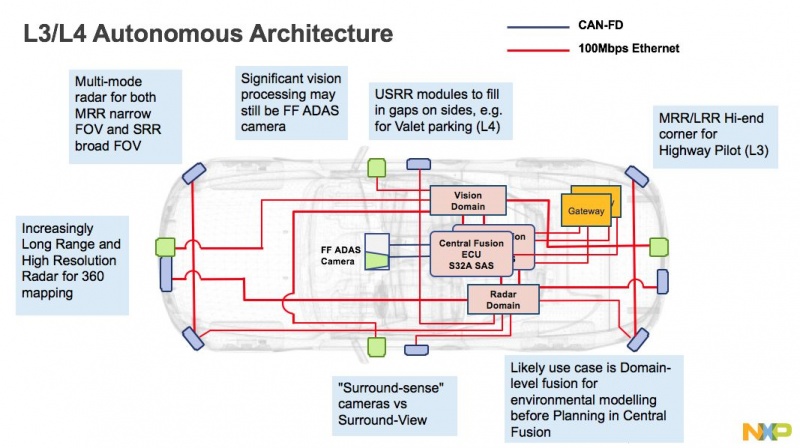
图2:自主驱动架构。
ADAS和自主技术只是等式的一部分。他们必须无缝地工作,并且在汽车的其他系统中不失灵。UMC市场营销副总裁史蒂文·刘说:“这项技术归结为两个基本组成部分:1)车辆与互联网的连接,2)车辆感知周围环境并与周围环境互动的能力。”
“例如,车辆对车辆(V2V)和车辆对基础设施(V2X)的不断采用意味着车辆雷达系统的数量持续增加,”刘说。“这些系统所需的技术包括汽车的防撞雷达和全球定位系统,以及与红绿灯和车辆调度员互动所需的传感器。这些系统将与现有的系统一起工作,例如乘客舒适度和信息娱乐控制,以及调节温度、轮胎压力和气体的发动机监测子系统。”
还有另一个关键方面的安全性。KLA-Tencor市场部高级主管罗伯特·卡佩尔(Robert Cappel)说:“许多半导体现在是ADAS的一部分,这对于汽车的功能和安全至关重要,因为汽车不能容忍故障。”“对自主驾驶特征的快速推动,以及最终的自主驾驶,进一步推动了对所有半导体芯片的完美合作,以保护汽车乘客和其他人在周围环境的安全的需要。”这是当今工业界对十亿分之一零缺陷需求的最大驱动力。
不仅仅是视觉
与此同时,汽车制造商正在采取各种方法来实现ADAS。例如,特斯拉的车辆包括八个摄像头,十二个超声波传感器和雷达。超声波传感器通过声波测量物体的距离。特斯拉目前不使用激光雷达,因为技术太昂贵。相比之下,其他的可能包括摄像机、雷达和激光雷达。在任何一种情况下,高级视觉是方程的关键部分。CMOS图像传感器业务联盟高级副总裁兼总经理Avi Strum说:“近年来,基于摄像机的传感器已经开始执行范围广泛的任务,如路标检测、车道偏离警告、光束控制、停车辅助甚至司机监控。”
但是照相机不能提供所有的安全功能。“的确,像Mobileye这样的公司相信基于摄像头的传感器可以提供完整的ADAS解决方案,”Strum说。尽管基于相机的传感器在明亮或中等光照条件下提供优异的环境横向分辨率,但在更恶劣的条件下,例如在黑暗、雨、雾或雪中,它们的性能迅速恶化。
这意味着,摄像机传感器必须改进,即在动态范围和近红外灵敏度的领域,他补充说。
雷达造波
雷达也是ADAS混合的一部分。简单地说,雷达发射毫米波范围内的电磁波。波信号从物体上反弹,然后反射回来。然后,雷达系统捕获信号来辨别目标的范围、速度和角度。在一些汽车中,原始设备制造商使用短距离和远程雷达。自适应巡航控制和自动紧急制动使用远程雷达(LRR)。对于LRR,雷达模块位于保险杠后的汽车的前部中心。
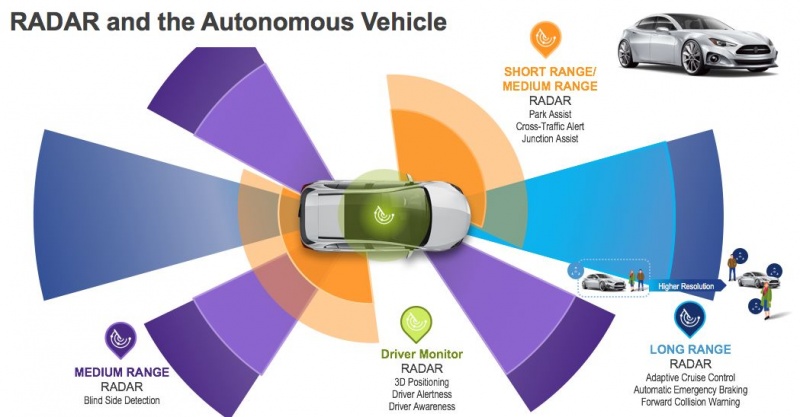
图3:自主汽车的雷达
正面LRR工作在77 GHz的毫米波频率,范围为160~200米。通常,前向雷达模块包括几个不同的组件,例如微控制器(MCU)和RF收发器。在操作中,收发器通过链路将雷达数据发送到MCU。
MCU,它处理,是基于CMOS,迁移从55纳米或40nm到28纳米及以上。同时,独立收发器通常基于一种称为硅锗(SiGe)的不同的高性能RF工艺。有些使用BiCMOS。这两种技术都是比较成熟的节点。
面向前方的LRR将保持在77 GHz,但技术正在开始改变。例如,作为最近推出的产品的一部分,德克萨斯仪器公司引入了一种将MCU和收发器结合在同一设备上的单片机雷达产品。雷达芯片组是基于一个45纳米RF CMOS工艺,使得能够集成不同的组件。
TI公司的产品经理Kishore Ramaiah说:“单芯片雷达传感器解决方案比双芯片解决方案有许多优点。”因为它是RF CMOS解决方案,所以它的特点是低功耗和高集成度,这反过来意味着更小的尺寸和优化的BOM。
然而,面向前方的基于LRR的雷达很可能会坚持离散的解决方案,至少目前如此。NXP的Wilson说:“这些LRR模块的设计有很多变化,这使我认为MCU和收发器将在一段时间内是离散的。”随着时间的推移,随着射频CMOS技术的进步并能够支持LRR的RF性能要求,那么它将变得与SiGe更具竞争力。我希望他们能共存一段时间。”
真正的设计行动是在短程雷达(SRR)模块中进行,该模块目前工作在24GHz,距离从60米到70米。SRR模块位于汽车后角,用于车道检测、车道保持及相关功能。同时,连接辅助也使用SRR,其中模块位于左前保险杠中。随着车辆向更先进的ADAS功能移动,SRR雷达从24 GHz发展到更高性能的79 GHz频段。79 GHz规格用于避免在前面77 GHz的干扰。
后角雷达模块也正在从离散到芯片组的解决方案。在收发信机与MCU的集成中,RF CMOS具有市场利益。这对于远距离前向雷达来说并不重要,但对于角雷达来说更重要,因为角雷达需要更小并且成本更敏感。
对于这个模块,OEM有几种选择。如上所述,TI提供了使用45纳米RF CMOS的芯片组。然后,在另一种方法中,ADI和瑞萨正在使用一个28纳米RF CMOS工艺开发一个77/79 GHz雷达设备。同时,在另一种选择中,GlobalFoundries正在提供22nmFD-SOI,一种在基板中结合薄绝缘层以抑制泄漏的技术。
像块CMOS一样,FD-SOI使芯片制造商能够集成各种组件,包括雷达芯片。FD-SOI也解决了另一个问题。“一个雷达单元的功耗已经相当高了。如果你引进更多的雷达设备,热问题就会成为一个大问题。“大容量CMOS无法解决这个问题。用FD-SOI,你可以把每雷达的能量消耗降低到1瓦以下。
当然,传统的选择是使用独立的基于SiGe的收发器。“基于SiGe的短程和远程雷达满足了汽车雷达的要求,”TowerJazz战略营销高级主管AmolKalbure说。使用SiGe最重要的参数是将发射机侧的功率放大器和接收侧的低噪声放大器完全集成在同一芯片上,从而获得最佳性能和更低的成本。
如前所述,雷达有一些优点和缺点。雷达在高分辨率探测物体上是很好的。但是雷达分辨不出那个物体。例如,它不能辨别物体是人还是狗。雷达需要相机,这有助于了解周围环境。因此,需要快速的图形处理和深度学习。
“例如,雷达在恶劣的天气条件(雨、雾、雪)下要优越得多,而激光雷达则允许对环境进行详细的3D扫描,以检测和分类静止的和移动的物体,”Kalbure说。“雷达传感器相当紧凑和成本效益,所以它们已经被大多数OEM公司积极采用。当今的汽车雷达解决方案的分辨率有时不能满足完全自主的应用,但是正在开发新的硬件和软件解决方案来提高分辨率。”
事实上,该行业正在研究下一代雷达。一个目标是关闭激光雷达分辨率差距,甚至取代激光雷达。“未来,你将看到LiDAR和雷达之间的比赛,”GualalgDrices公司的Granger说。在研发中,IMEC正在开发140 GHz雷达技术。其他人正在研究成像雷达。美国国家仪器公司技术营销专家Marcus Monroe说:“雷达正在不断改进。”新的天线设计和先进的处理算法赋予了雷达新的能力,使其能够用于以前没有使用的领域,如行人检测。
那么什么是成像雷达?成像雷达是雷达的一种应用,通过快速产生雷达脉冲,利用雷达的反射能量产生2D或3D图像。这已经在航空航天工业中应用多年,例如陆地测绘和天气。它还没有被用于汽车雷达,可能是由于电力和加工的限制,“梦露说。
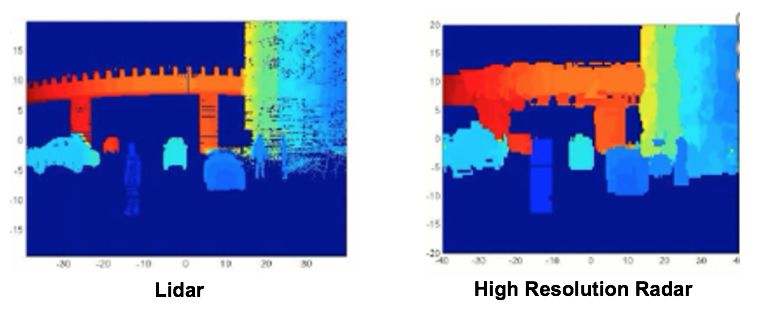
图4:高分辨率雷达与激光雷达。
LiDAR是什么?
激光雷达继续取得进展。门罗说:“LiDAR也在降低成本,向固态和新的连续波形方向发展。”激光雷达与自主驾驶相关,但并不局限于这些应用。LiDAR供应商Velodyne的首席技术官Anand Gopalan说:“你们发现LiDAR与照相机和雷达一起应用于ADAS车辆。”
这项技术与雷达不同。Gopalan说:“在激光雷达中,你发射一系列光脉冲并测量返回飞行时间。”“你正在创造三维、高分辨率的世界地图。”激光雷达有各种各样的技术挑战。它还昂贵的几个移动部件,但这开始改变。一般来说,相机售价为30美元,而LiDAR则是3000美元。但根据Yole的说法,一些激光雷达系统正朝着300美元的价格点移动。
根据Frost和沙利文的说法,有三种方法适用于激光雷达机械、MEMS和混合固态。机械激光雷达在高端工业市场中使用,而MEMS为基础的解决方案正在出现。然后,大量的公司正在研发更小更紧凑的固态激光雷达系统。固态LiDAR很少,如果有的话,运动部件。
激光雷达利用了几个关键部件,即激光二极管、光电探测器和处理元件。使用激光二极管,以905nm波长的激光形式发射光脉冲。根据Frost和沙利文的说法,激光激发了一百万个光子,但问题是只有一个光子返回系统。
因此,激光雷达制造商将一些激光器,有时高达64,以增加光子的数量。根据该公司的说法,发送十亿光子的激光器会产生1000个返回光子。一旦光子发射出来,它们就从物体上反弹回来。然后,光电探测器在窄或360度视场的系统中检测并捕获返回信号。日照和天气条件会影响探测器的信噪比。之后,计算给定物体的距离。然后对数据进行处理。“你有复杂的信号处理,它发生在一个更密集的处理元件,如FPGA或处理器,”。
随着时间的推移,我们的目标是整合更多的功能来降低成本。“我们正在使用我们自己的ASIC技术将大量的功能组合成一组ASIC。Gopalan说,这允许更紧密的整合,更小的形式因素,也可以降低成本。“我们认为,在不久的将来,你不会有一片硅,上面有整个激光雷达,但它会非常接近。”你会看到一个高度集成的多芯片模块,它将有一个全功能的激光雷达。
其他组件也朝着更多的集成在激光雷达,如激光二极管驱动器。这部分提供激光二极管的电流。
例如,Velodyne使用基于高效功率转换(EPC)的氮化镓(GaN)技术的激光二极管驱动芯片。根据EPC的首席执行官Alex Lidow所说,GaN的开关速度比硅快100倍。氮化镓用于发电、激光发射和控制。Lidow说:“由于GaN的快速开关速度、高电压和高电流能力,激光发送的光子包可以缩短,每个脉冲中都装有更多的光子。”“因此,激光雷达系统可以进一步看到,并具有更大的分辨率,同时创造一个更快的位图周围的环境。”他说,驱动激光二极管的方法有很多,但是主要有两种——电容放电(CD)和FET控制。GaN基激光二极管驱动器占激光雷达系统总成本的5%以下。“GaN晶体管已经被降低系统成本和提高性能的GaN集成电路所取代,”他说。“随着系统成本的下降,GaN的成本将下降。
在Episil的铸造基础上制造,EPC的GaN基激光二极管驱动器基于350nm工艺。随着时间的推移,它计划迁移到130nm。另一个关键部件是光电二极管,一种将光转换成电流的半导体器件。对于LiDAR,主要有四种光电二极管类型:pin光电二极管、雪崩光电二极管(APD)、单光子雪崩二极管(SPAD)和硅光电倍增管(SiPM)。
“探测器技术的选择可能取决于波长的选择,”Gopalan说。“在905nm区域,硅APD在增益和提供最佳信噪比的能力方面仍然是最可靠和经过验证的技术。SiPMs继续显示出承诺,但其在激光雷达系统水平上的SNR优势仍有待证实。
那么,这一切将如何在未来上演呢?摄像机、激光雷达和雷达很可能共存。他说:“我们认为你不会看到任何一种情况。”“雷达有继续补充和增强激光雷达提供信息的空间。你会继续将相机视为第三种传感器模式。
汽车市场一直是供应商的难题。OEM希望更小、更快、更便宜的设备与先进的驾驶员辅助系统(ADAS)和自主驾驶技术具有相同的或改进的安全水平。一般来说,ADAS涉及汽车的各种安全特性,如自动紧急制动、车道检测和后方目标警告。雷达是一种用于车辆盲点检测和其他安全特征的目标检测技术,是一个很好的例子。“随着时间的推移,雷达模块已经大大缩小了。NXP的产品线经理Thomas Wilson说,热需求越来越难。“所以,性能要求正在上升。尺寸正在下降。而且成本要求也越来越高。今天在汽车中使用的雷达模块是笨拙的系统,包括基于不同过程的多个芯片。但是为了减小尺寸和成本,英飞凌、NXP、Renesas和TI正在向集成雷达芯片组发展,这些芯片组合在同一设备上的各种组件。
雷达芯片组是针对某些应用,但它们指向一种新兴的趋势。IC制造商正在使用45nm和28nm的标准CMOS工艺集成雷达设备,而不是为各种芯片使用不同的工艺。其他工艺选择包括22nm散装和FD-SOI。
另一项技术,LiDAR,正在从庞大的系统向具有更集成组件的小型固态单元转移,以努力降低该技术的高成本。激光雷达(光成像、探测和测距)使用脉冲激光来测量距离。
还有其他动力在起作用。例如,该行业正在开发具有更高分辨率的下一代雷达,此举旨在取代激光雷达。但是激光雷达技术并不是静止不动的。
事实证明,没有一种技术覆盖所有的ADA/Autual需求。今天,一些车辆采用先进的视觉系统和雷达。随着时间的推移,它们也可能包括激光雷达,这意味着各种技术将共存。
每种技术都有其利弊。“激光雷达是一种比雷达更昂贵的系统,但它更准确地识别物体。LiDAR在诸如雪、雨和雾等恶劣天气条件下有其局限性。虽然雷达似乎不受天气条件的影响,但它不能像激光雷达那样精确地确定物体的大小和形状。
为了帮助OEM公司走在曲线的前面,半导体工程公司已经研究了先进的视觉、雷达和激光雷达的发展趋势,以及供应商试图降低成本的方法。
更安全的汽车
汽车制造商正在接受这些安全导向的技术,这是有充分理由的。根据美国国家公路交通安全管理局(U.S.National Highway Traffic Safety.)的统计,94%的严重碰撞是由于驾驶员失误造成的。
因此,多年来,汽车行业在车辆中引入了更多的安全特性。
为此,根据NXP的威尔逊(Wilson)的说法,汽车业正沿着两条平行的路径——新车评估计划(NCAP)和自主技术。为此,根据NXP的威尔逊(Wilson)的说法,汽车业正沿着两条平行的路径——新车评估计划(NCAP)和自主技术。多年来,亚洲、欧洲和美国都推出了NCAP的指导方针。在这个程序中,汽车被测试并根据车辆的安全性给出星级评级。五星级是最高水平,一星级是最低。
“五星评级对汽车销售产生了巨大影响。由于保险费较低,更多的消费者被激励购买五星级汽车。Wilson说,他们也更安全。每个洲都有自己的NCAP标准。但简单来说,根据NXP,基本NCAP标准涉及若干ADAS技术,例如自适应巡航控制、自动紧急制动、交叉口辅助、车道保持辅助等。
图1:NCAP标准的五星级评级。
在自适应巡航控制中,汽车自动调节其在交通中的速度。自动紧急制动是指车辆在感知到碰撞时自动制动的情况。在车道保持辅助中,汽车将自动防止驾驶员进行不安全的车道变换。然后,在连接辅助中,驾驶员想要进行转弯。如果不安全,汽车就会自动刹车。
NCAP路线图为汽车中需要更多传感器提供了动力。“例如,自动紧急制动将利用相机和雷达,”马克格兰杰说,目前在全球铸造公司的汽车。“这项技术正开始从超豪华转向中层车型。”除此之外,汽车制造商还遵循一条涉及自主驾驶技术的平行路径,这一举措正在推动对相机、激光雷达和雷达的需求。然而,全自动驾驶技术可能无法在十年或更长时间内达到主流。
图2:自主驱动架构。
ADAS和自主技术只是等式的一部分。他们必须无缝地工作,并且在汽车的其他系统中不失灵。UMC市场营销副总裁史蒂文·刘说:“这项技术归结为两个基本组成部分:1)车辆与互联网的连接,2)车辆感知周围环境并与周围环境互动的能力。”
“例如,车辆对车辆(V2V)和车辆对基础设施(V2X)的不断采用意味着车辆雷达系统的数量持续增加,”刘说。“这些系统所需的技术包括汽车的防撞雷达和全球定位系统,以及与红绿灯和车辆调度员互动所需的传感器。这些系统将与现有的系统一起工作,例如乘客舒适度和信息娱乐控制,以及调节温度、轮胎压力和气体的发动机监测子系统。”
还有另一个关键方面的安全性。KLA-Tencor市场部高级主管罗伯特·卡佩尔(Robert Cappel)说:“许多半导体现在是ADAS的一部分,这对于汽车的功能和安全至关重要,因为汽车不能容忍故障。”“对自主驾驶特征的快速推动,以及最终的自主驾驶,进一步推动了对所有半导体芯片的完美合作,以保护汽车乘客和其他人在周围环境的安全的需要。”这是当今工业界对十亿分之一零缺陷需求的最大驱动力。
不仅仅是视觉
与此同时,汽车制造商正在采取各种方法来实现ADAS。例如,特斯拉的车辆包括八个摄像头,十二个超声波传感器和雷达。超声波传感器通过声波测量物体的距离。特斯拉目前不使用激光雷达,因为技术太昂贵。相比之下,其他的可能包括摄像机、雷达和激光雷达。在任何一种情况下,高级视觉是方程的关键部分。CMOS图像传感器业务联盟高级副总裁兼总经理Avi Strum说:“近年来,基于摄像机的传感器已经开始执行范围广泛的任务,如路标检测、车道偏离警告、光束控制、停车辅助甚至司机监控。”
但是照相机不能提供所有的安全功能。“的确,像Mobileye这样的公司相信基于摄像头的传感器可以提供完整的ADAS解决方案,”Strum说。尽管基于相机的传感器在明亮或中等光照条件下提供优异的环境横向分辨率,但在更恶劣的条件下,例如在黑暗、雨、雾或雪中,它们的性能迅速恶化。
这意味着,摄像机传感器必须改进,即在动态范围和近红外灵敏度的领域,他补充说。
雷达造波
雷达也是ADAS混合的一部分。简单地说,雷达发射毫米波范围内的电磁波。波信号从物体上反弹,然后反射回来。然后,雷达系统捕获信号来辨别目标的范围、速度和角度。在一些汽车中,原始设备制造商使用短距离和远程雷达。自适应巡航控制和自动紧急制动使用远程雷达(LRR)。对于LRR,雷达模块位于保险杠后的汽车的前部中心。
图3:自主汽车的雷达
正面LRR工作在77 GHz的毫米波频率,范围为160~200米。通常,前向雷达模块包括几个不同的组件,例如微控制器(MCU)和RF收发器。在操作中,收发器通过链路将雷达数据发送到MCU。
MCU,它处理,是基于CMOS,迁移从55纳米或40nm到28纳米及以上。同时,独立收发器通常基于一种称为硅锗(SiGe)的不同的高性能RF工艺。有些使用BiCMOS。这两种技术都是比较成熟的节点。
面向前方的LRR将保持在77 GHz,但技术正在开始改变。例如,作为最近推出的产品的一部分,德克萨斯仪器公司引入了一种将MCU和收发器结合在同一设备上的单片机雷达产品。雷达芯片组是基于一个45纳米RF CMOS工艺,使得能够集成不同的组件。
TI公司的产品经理Kishore Ramaiah说:“单芯片雷达传感器解决方案比双芯片解决方案有许多优点。”因为它是RF CMOS解决方案,所以它的特点是低功耗和高集成度,这反过来意味着更小的尺寸和优化的BOM。
然而,面向前方的基于LRR的雷达很可能会坚持离散的解决方案,至少目前如此。NXP的Wilson说:“这些LRR模块的设计有很多变化,这使我认为MCU和收发器将在一段时间内是离散的。”随着时间的推移,随着射频CMOS技术的进步并能够支持LRR的RF性能要求,那么它将变得与SiGe更具竞争力。我希望他们能共存一段时间。”
真正的设计行动是在短程雷达(SRR)模块中进行,该模块目前工作在24GHz,距离从60米到70米。SRR模块位于汽车后角,用于车道检测、车道保持及相关功能。同时,连接辅助也使用SRR,其中模块位于左前保险杠中。随着车辆向更先进的ADAS功能移动,SRR雷达从24 GHz发展到更高性能的79 GHz频段。79 GHz规格用于避免在前面77 GHz的干扰。
后角雷达模块也正在从离散到芯片组的解决方案。在收发信机与MCU的集成中,RF CMOS具有市场利益。这对于远距离前向雷达来说并不重要,但对于角雷达来说更重要,因为角雷达需要更小并且成本更敏感。
对于这个模块,OEM有几种选择。如上所述,TI提供了使用45纳米RF CMOS的芯片组。然后,在另一种方法中,ADI和瑞萨正在使用一个28纳米RF CMOS工艺开发一个77/79 GHz雷达设备。同时,在另一种选择中,GlobalFoundries正在提供22nmFD-SOI,一种在基板中结合薄绝缘层以抑制泄漏的技术。
像块CMOS一样,FD-SOI使芯片制造商能够集成各种组件,包括雷达芯片。FD-SOI也解决了另一个问题。“一个雷达单元的功耗已经相当高了。如果你引进更多的雷达设备,热问题就会成为一个大问题。“大容量CMOS无法解决这个问题。用FD-SOI,你可以把每雷达的能量消耗降低到1瓦以下。
当然,传统的选择是使用独立的基于SiGe的收发器。“基于SiGe的短程和远程雷达满足了汽车雷达的要求,”TowerJazz战略营销高级主管AmolKalbure说。使用SiGe最重要的参数是将发射机侧的功率放大器和接收侧的低噪声放大器完全集成在同一芯片上,从而获得最佳性能和更低的成本。
如前所述,雷达有一些优点和缺点。雷达在高分辨率探测物体上是很好的。但是雷达分辨不出那个物体。例如,它不能辨别物体是人还是狗。雷达需要相机,这有助于了解周围环境。因此,需要快速的图形处理和深度学习。
“例如,雷达在恶劣的天气条件(雨、雾、雪)下要优越得多,而激光雷达则允许对环境进行详细的3D扫描,以检测和分类静止的和移动的物体,”Kalbure说。“雷达传感器相当紧凑和成本效益,所以它们已经被大多数OEM公司积极采用。当今的汽车雷达解决方案的分辨率有时不能满足完全自主的应用,但是正在开发新的硬件和软件解决方案来提高分辨率。”
事实上,该行业正在研究下一代雷达。一个目标是关闭激光雷达分辨率差距,甚至取代激光雷达。“未来,你将看到LiDAR和雷达之间的比赛,”GualalgDrices公司的Granger说。在研发中,IMEC正在开发140 GHz雷达技术。其他人正在研究成像雷达。美国国家仪器公司技术营销专家Marcus Monroe说:“雷达正在不断改进。”新的天线设计和先进的处理算法赋予了雷达新的能力,使其能够用于以前没有使用的领域,如行人检测。
那么什么是成像雷达?成像雷达是雷达的一种应用,通过快速产生雷达脉冲,利用雷达的反射能量产生2D或3D图像。这已经在航空航天工业中应用多年,例如陆地测绘和天气。它还没有被用于汽车雷达,可能是由于电力和加工的限制,“梦露说。
图4:高分辨率雷达与激光雷达。
LiDAR是什么?
激光雷达继续取得进展。门罗说:“LiDAR也在降低成本,向固态和新的连续波形方向发展。”激光雷达与自主驾驶相关,但并不局限于这些应用。LiDAR供应商Velodyne的首席技术官Anand Gopalan说:“你们发现LiDAR与照相机和雷达一起应用于ADAS车辆。”
这项技术与雷达不同。Gopalan说:“在激光雷达中,你发射一系列光脉冲并测量返回飞行时间。”“你正在创造三维、高分辨率的世界地图。”激光雷达有各种各样的技术挑战。它还昂贵的几个移动部件,但这开始改变。一般来说,相机售价为30美元,而LiDAR则是3000美元。但根据Yole的说法,一些激光雷达系统正朝着300美元的价格点移动。
根据Frost和沙利文的说法,有三种方法适用于激光雷达机械、MEMS和混合固态。机械激光雷达在高端工业市场中使用,而MEMS为基础的解决方案正在出现。然后,大量的公司正在研发更小更紧凑的固态激光雷达系统。固态LiDAR很少,如果有的话,运动部件。
激光雷达利用了几个关键部件,即激光二极管、光电探测器和处理元件。使用激光二极管,以905nm波长的激光形式发射光脉冲。根据Frost和沙利文的说法,激光激发了一百万个光子,但问题是只有一个光子返回系统。
因此,激光雷达制造商将一些激光器,有时高达64,以增加光子的数量。根据该公司的说法,发送十亿光子的激光器会产生1000个返回光子。一旦光子发射出来,它们就从物体上反弹回来。然后,光电探测器在窄或360度视场的系统中检测并捕获返回信号。日照和天气条件会影响探测器的信噪比。之后,计算给定物体的距离。然后对数据进行处理。“你有复杂的信号处理,它发生在一个更密集的处理元件,如FPGA或处理器,”。
随着时间的推移,我们的目标是整合更多的功能来降低成本。“我们正在使用我们自己的ASIC技术将大量的功能组合成一组ASIC。Gopalan说,这允许更紧密的整合,更小的形式因素,也可以降低成本。“我们认为,在不久的将来,你不会有一片硅,上面有整个激光雷达,但它会非常接近。”你会看到一个高度集成的多芯片模块,它将有一个全功能的激光雷达。
其他组件也朝着更多的集成在激光雷达,如激光二极管驱动器。这部分提供激光二极管的电流。
例如,Velodyne使用基于高效功率转换(EPC)的氮化镓(GaN)技术的激光二极管驱动芯片。根据EPC的首席执行官Alex Lidow所说,GaN的开关速度比硅快100倍。氮化镓用于发电、激光发射和控制。Lidow说:“由于GaN的快速开关速度、高电压和高电流能力,激光发送的光子包可以缩短,每个脉冲中都装有更多的光子。”“因此,激光雷达系统可以进一步看到,并具有更大的分辨率,同时创造一个更快的位图周围的环境。”他说,驱动激光二极管的方法有很多,但是主要有两种——电容放电(CD)和FET控制。GaN基激光二极管驱动器占激光雷达系统总成本的5%以下。“GaN晶体管已经被降低系统成本和提高性能的GaN集成电路所取代,”他说。“随着系统成本的下降,GaN的成本将下降。
在Episil的铸造基础上制造,EPC的GaN基激光二极管驱动器基于350nm工艺。随着时间的推移,它计划迁移到130nm。另一个关键部件是光电二极管,一种将光转换成电流的半导体器件。对于LiDAR,主要有四种光电二极管类型:pin光电二极管、雪崩光电二极管(APD)、单光子雪崩二极管(SPAD)和硅光电倍增管(SiPM)。
“探测器技术的选择可能取决于波长的选择,”Gopalan说。“在905nm区域,硅APD在增益和提供最佳信噪比的能力方面仍然是最可靠和经过验证的技术。SiPMs继续显示出承诺,但其在激光雷达系统水平上的SNR优势仍有待证实。
那么,这一切将如何在未来上演呢?摄像机、激光雷达和雷达很可能共存。他说:“我们认为你不会看到任何一种情况。”“雷达有继续补充和增强激光雷达提供信息的空间。你会继续将相机视为第三种传感器模式。
- 下一篇:绿驰汽车首款量产SUV高寒试验照曝光
- 上一篇:奇瑞艾瑞泽5完成行人保护试验



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
