




 广告
广告





















































ACC自适应巡航控制系统介绍
2019-02-20 10:55:11· 来源:罗孚传说

本文是关于ACC自适应巡航控制系统的介绍,罗孚从个人视角出发,描述对ACC系统的理解,以及在一些使用场景下的思考。什么是ACC?ACC系统是在定速巡航装置的基础上
本文是关于ACC自适应巡航控制系统的介绍,罗孚从个人视角出发,描述对ACC系统的理解,以及在一些使用场景下的思考。
什么是ACC?
ACC系统是在定速巡航装置的基础上发展而来的,区别在于定速巡航只能限定速度,方向盘和刹车还需要驾驶员控制,而ACC能够较好的帮助驾驶员协调方向盘和刹车。定速巡航算是L1级别的自动驾驶,而ACC则可以算是L2级别的自动驾驶。
ACC主要有两个参数,车速和距离。如果“前面没车”,那么可以使用驾驶员设定的期望车速来行车,这与定速巡航功能相当,如果配合车道保持LKA系统,可以做到沿当前车道一直行驶。如果前车很慢而导致本车不可能用期望车速来行驶,那么ACC可以使得两车保持驾驶员设定的期望车距。在需要时,车辆会自动刹车和/或变速,以保持设置的车速或距离。在某些行驶状况下,还会要求驾驶员主动进行制动,这个警报信息会以声音和视觉方式显示出来。

ACC的使用方法
在介绍ACC原理之前,我们先来熟悉一下操作方法。
首先,打开ACC功能
ACC的所有操作功能都集成在了下图的拨杆上,把拨杆向司机方向拉动,即可开启ACC功能,把拨杆推回去则可以关闭ACC功能。

其次,设定期望车速
向上或向下推动操纵杆,可以提高或降低期望车速,车速可设置的范围一般为30~200Km/h,默认30Km/h开始,每推动一次,可以增加或减少10Km/h(有些步长是5Km/h),最后按下设置按键,即可保存车速,同时在仪表上也会显示设置的速度值。补充一下,对于全速ACC,则可以做到0Km/h起步,没有最低速度要求,这也是下文谈到的停停走走(Stop & Go)功能的基础。
再次,设定期望车距
本车和前车的车距,可以设置为4个等级,拨动滑动开关即可,默认车距为3级。需要注意,此处的车距不是一个固定的长度距离,而是一个恒定的时间间隔,最终的车距取决于前面设置的车速。原因在于,1到4级分别代表了不一样的响应时间,分别是1.0s、1.3s、1.8s和2.3s,实际上撞车的风险也是在于你的响应时间,很多事故及早响应都是能够避免的。车距设置的建议,一般在畅通的高速上,等级设高,因为车速较快,安全第一,而在市区道路,等级设低,车速不快,同时保持良好的停停走走体验。
最后,可以开始ACC了
除了以上三项设置外,还有行驶程序设置,即设置你的驾驶模式,有舒适、自动、运动、高效和个性化几种模式可供选择。当然还能设置提示音量大小。
当你的车速超过30Km/h时,ACC就自动启动了(全速ACC可以直接启动),他就会自动加速到你设定的车速(如果前方没有障碍物的话),然后在车速和车距上进行保持。

是不是马上就能获得舒适的开车体验了?是的,你可以把脚离开油门,甚至离开刹车都没问题。当然,离开方向盘不行,离开超过30秒会自动报警,毕竟不是自动驾驶,还是需要你来控制方向的。
除了这一些,还需要注意仪表上的显示,正常情况下绿色显示,在某些情况下,比如减速不能保持设定的车距,这时车辆就会发出警告,仪表会显示红色警告信息,同时会发出声音报警。
ACC原理
ACC功能主要利用了雷达技术,通过毫米波雷达,发射毫米波段的电磁波,利用障碍物反射波的时间差确定障碍物距离,利用反射波的频率偏移确定相对速度。毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的优点。ACC一般使用的是77GHz的长距离雷达,距离可达100-200米。
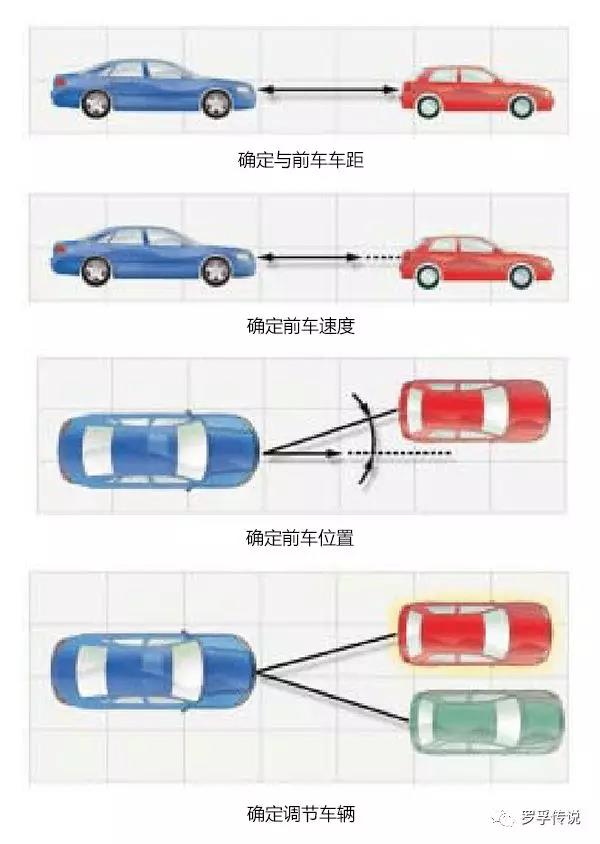
ACC在技术实现上主要按以下四个步骤
第一步:距离测量
判断同前方车辆的距离,如果没有车辆(一般为毫米波雷达可探测的200米距离内),那么车辆就开始按照设定的速度行驶。
第二步:确定前车速度
确定前车速度的目的在于获得相对速度,通过第一步中的距离,可以推算出抵达前车所需要的时间,这个时间就可以和ACC设定的期望车距进行比较了。(什么?时间和距离进行比较?没错,这里和上文的ACC设置期望车距相呼应,期望车距实际是响应时间)
第三步:确定前车位置
毫米波雷达的视场角虽然较小,但探测130米开外的物体,那探测宽度就可能超过三根车道,加上弯道等情况,雷达会判断到前方多辆不同位置的车。
第四步:确定针对哪辆车来进行调节
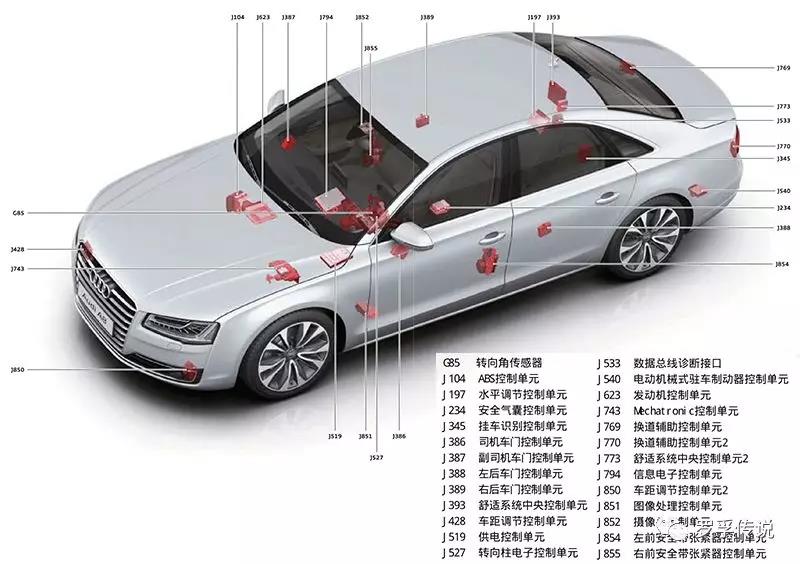
前一步是确定车辆和位置,这一步就需要确定跟随车辆,这是一个重要的判断决策,也是ACC安全保障的关键,需要协调车内其他控制单元一起来判断,比如车道识别单元。另外,本处的调节,不仅仅是油门刹车这么简单,有更多的传感器单元参与其中,比如转向角、车轮转速等传感器。
ACC附加功能
ACC的附加功能比较多,如变道辅助、超车辅助、弯道辅助、停停走走等功能,这里只介绍一个非常有用的功能,就是停停走走,英文是Stop & Go。当然,不是所有具有ACC功能的车都配备了停停走走功能,还是有不少品牌车辆是不具备该功能的。
如果ACC的跟车功能主要用于高速公路驾驶,那么ACC下的停停走走主要用于市区道路。简单的来说,停停走走功能依然是跟随前方车辆,但前方车辆停下的时候,ACC车辆也会停下,前方车辆再次前进,ACC车辆也会自动加速。停停走走可以非常好的解决了跟车堵车或等红绿灯的问题,缓解了市区复杂环境下开车疲劳问题,是女司机的福音:)
停停走走功能也是有弊端的,一方面在停住前的2-3米,车辆是以2Km/h的速度爬行过去的,另一方面停车的车距在3.5-4米之间。这些弊端可能是出于安全考虑,而且国外行车环境也许相对文明,放在加塞抢道严重的国内环境,恐怕不知道被抢道超车多少次了,这种情况下走走停停的感受应该会很差吧。除了距离因素,还有时间因素,自动启动是在3秒后生效,对于拥堵的情况,多停3秒,给旁边的车辆增加了加塞的机会,也加剧了碰撞的风险。
ACC的优势和问题
ACC开发的初衷就是缓解疲劳,提高驾驶舒适度,这是毋庸置疑的优势。ACC也是自动驾驶前的初级功能,结合车道保持LKA、前向碰撞预警FCW、自动紧急制动AEB、变道辅助等系统,可以获得半自动驾驶的良好体验。ACC不仅仅用于高速环境,其走走停停功能更能用于市区拥堵环境,使用环境更广泛,辅助人类驾驶的作用更为突出。
虽然ACC功能非常强大,但也存在劣势。我们列举一些常见的问题。
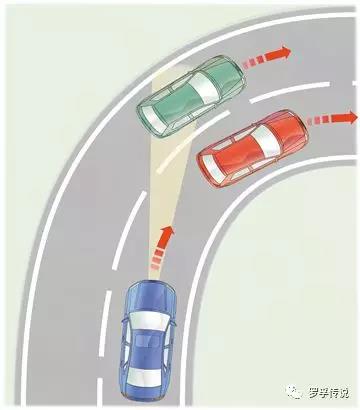
ACC能跟车转弯吗?
大部分情况应该是无法跟车转弯的,90度弯和急弯应该都是过不了的,一方面雷达探测自身的局限性,另一方面在路口没有车道线,其车道保持功能也无法起作用。对于缓拐(如下匝道岔路口)和弯道(如高速小弯),ACC(实际上是车道保持系统)可以完成小幅度的拐弯,但对于稍大的弯,车辆就有可能判断错车辆而出现短暂急加速或急减速的情况。所以不要指望ACC能像车队自驾一样跟车,只要能完成高速跟车和市区堵车跟车就已经非常了不起了,对于拐弯的情况,还是自己多多把控吧。

ACC能识别摩托或行人吗?
如果在市区停停走走时,遇到加塞,即便碰了,那也是车车事故,那如果遇到行人或摩托呢?好问题,罗孚至今也没有明白,据说这又属于行人识别和行人保护两个功能,行人识别是只识别不减速,行人保护是识别并刹车,这两个功能是在ACC功能之外的,仅仅ACC的话,是无法识别行人的。对于市区环境,行人乱穿马路、电动车骑到机动车道等情况时有发生,使用ACC时还是多注意刹车吧。
ACC安全吗?
这是一个中立的问题,回答也是中立的,正是因为安全,所以车企才会将此功能开放给客户,但又是不安全的,不安全的因素也很多,如恶劣天气、加塞判断不够灵敏、刹车不够及时或力度、前方挂车异行物体判断错误等,同时更有驾驶员自身因素,使用ACC时没有保持警惕,甚至忽略了ACC的报警等。总的来说,建议在路况良好的情况下使用ACC,享受舒适的同时保持警惕,右脚依然不能离开刹车,该刹车时还是要自己主动刹车,这才是ACC正确的使用姿势:)
什么是ACC?
ACC系统是在定速巡航装置的基础上发展而来的,区别在于定速巡航只能限定速度,方向盘和刹车还需要驾驶员控制,而ACC能够较好的帮助驾驶员协调方向盘和刹车。定速巡航算是L1级别的自动驾驶,而ACC则可以算是L2级别的自动驾驶。
ACC主要有两个参数,车速和距离。如果“前面没车”,那么可以使用驾驶员设定的期望车速来行车,这与定速巡航功能相当,如果配合车道保持LKA系统,可以做到沿当前车道一直行驶。如果前车很慢而导致本车不可能用期望车速来行驶,那么ACC可以使得两车保持驾驶员设定的期望车距。在需要时,车辆会自动刹车和/或变速,以保持设置的车速或距离。在某些行驶状况下,还会要求驾驶员主动进行制动,这个警报信息会以声音和视觉方式显示出来。
ACC的使用方法
在介绍ACC原理之前,我们先来熟悉一下操作方法。
首先,打开ACC功能
ACC的所有操作功能都集成在了下图的拨杆上,把拨杆向司机方向拉动,即可开启ACC功能,把拨杆推回去则可以关闭ACC功能。
其次,设定期望车速
向上或向下推动操纵杆,可以提高或降低期望车速,车速可设置的范围一般为30~200Km/h,默认30Km/h开始,每推动一次,可以增加或减少10Km/h(有些步长是5Km/h),最后按下设置按键,即可保存车速,同时在仪表上也会显示设置的速度值。补充一下,对于全速ACC,则可以做到0Km/h起步,没有最低速度要求,这也是下文谈到的停停走走(Stop & Go)功能的基础。
再次,设定期望车距
本车和前车的车距,可以设置为4个等级,拨动滑动开关即可,默认车距为3级。需要注意,此处的车距不是一个固定的长度距离,而是一个恒定的时间间隔,最终的车距取决于前面设置的车速。原因在于,1到4级分别代表了不一样的响应时间,分别是1.0s、1.3s、1.8s和2.3s,实际上撞车的风险也是在于你的响应时间,很多事故及早响应都是能够避免的。车距设置的建议,一般在畅通的高速上,等级设高,因为车速较快,安全第一,而在市区道路,等级设低,车速不快,同时保持良好的停停走走体验。
最后,可以开始ACC了
除了以上三项设置外,还有行驶程序设置,即设置你的驾驶模式,有舒适、自动、运动、高效和个性化几种模式可供选择。当然还能设置提示音量大小。
当你的车速超过30Km/h时,ACC就自动启动了(全速ACC可以直接启动),他就会自动加速到你设定的车速(如果前方没有障碍物的话),然后在车速和车距上进行保持。
是不是马上就能获得舒适的开车体验了?是的,你可以把脚离开油门,甚至离开刹车都没问题。当然,离开方向盘不行,离开超过30秒会自动报警,毕竟不是自动驾驶,还是需要你来控制方向的。
除了这一些,还需要注意仪表上的显示,正常情况下绿色显示,在某些情况下,比如减速不能保持设定的车距,这时车辆就会发出警告,仪表会显示红色警告信息,同时会发出声音报警。
ACC原理
ACC功能主要利用了雷达技术,通过毫米波雷达,发射毫米波段的电磁波,利用障碍物反射波的时间差确定障碍物距离,利用反射波的频率偏移确定相对速度。毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的优点。ACC一般使用的是77GHz的长距离雷达,距离可达100-200米。
ACC在技术实现上主要按以下四个步骤
第一步:距离测量
判断同前方车辆的距离,如果没有车辆(一般为毫米波雷达可探测的200米距离内),那么车辆就开始按照设定的速度行驶。
第二步:确定前车速度
确定前车速度的目的在于获得相对速度,通过第一步中的距离,可以推算出抵达前车所需要的时间,这个时间就可以和ACC设定的期望车距进行比较了。(什么?时间和距离进行比较?没错,这里和上文的ACC设置期望车距相呼应,期望车距实际是响应时间)
第三步:确定前车位置
毫米波雷达的视场角虽然较小,但探测130米开外的物体,那探测宽度就可能超过三根车道,加上弯道等情况,雷达会判断到前方多辆不同位置的车。
第四步:确定针对哪辆车来进行调节
前一步是确定车辆和位置,这一步就需要确定跟随车辆,这是一个重要的判断决策,也是ACC安全保障的关键,需要协调车内其他控制单元一起来判断,比如车道识别单元。另外,本处的调节,不仅仅是油门刹车这么简单,有更多的传感器单元参与其中,比如转向角、车轮转速等传感器。
ACC附加功能
ACC的附加功能比较多,如变道辅助、超车辅助、弯道辅助、停停走走等功能,这里只介绍一个非常有用的功能,就是停停走走,英文是Stop & Go。当然,不是所有具有ACC功能的车都配备了停停走走功能,还是有不少品牌车辆是不具备该功能的。
如果ACC的跟车功能主要用于高速公路驾驶,那么ACC下的停停走走主要用于市区道路。简单的来说,停停走走功能依然是跟随前方车辆,但前方车辆停下的时候,ACC车辆也会停下,前方车辆再次前进,ACC车辆也会自动加速。停停走走可以非常好的解决了跟车堵车或等红绿灯的问题,缓解了市区复杂环境下开车疲劳问题,是女司机的福音:)
停停走走功能也是有弊端的,一方面在停住前的2-3米,车辆是以2Km/h的速度爬行过去的,另一方面停车的车距在3.5-4米之间。这些弊端可能是出于安全考虑,而且国外行车环境也许相对文明,放在加塞抢道严重的国内环境,恐怕不知道被抢道超车多少次了,这种情况下走走停停的感受应该会很差吧。除了距离因素,还有时间因素,自动启动是在3秒后生效,对于拥堵的情况,多停3秒,给旁边的车辆增加了加塞的机会,也加剧了碰撞的风险。
ACC的优势和问题
ACC开发的初衷就是缓解疲劳,提高驾驶舒适度,这是毋庸置疑的优势。ACC也是自动驾驶前的初级功能,结合车道保持LKA、前向碰撞预警FCW、自动紧急制动AEB、变道辅助等系统,可以获得半自动驾驶的良好体验。ACC不仅仅用于高速环境,其走走停停功能更能用于市区拥堵环境,使用环境更广泛,辅助人类驾驶的作用更为突出。
虽然ACC功能非常强大,但也存在劣势。我们列举一些常见的问题。
ACC能跟车转弯吗?
大部分情况应该是无法跟车转弯的,90度弯和急弯应该都是过不了的,一方面雷达探测自身的局限性,另一方面在路口没有车道线,其车道保持功能也无法起作用。对于缓拐(如下匝道岔路口)和弯道(如高速小弯),ACC(实际上是车道保持系统)可以完成小幅度的拐弯,但对于稍大的弯,车辆就有可能判断错车辆而出现短暂急加速或急减速的情况。所以不要指望ACC能像车队自驾一样跟车,只要能完成高速跟车和市区堵车跟车就已经非常了不起了,对于拐弯的情况,还是自己多多把控吧。
ACC能识别摩托或行人吗?
如果在市区停停走走时,遇到加塞,即便碰了,那也是车车事故,那如果遇到行人或摩托呢?好问题,罗孚至今也没有明白,据说这又属于行人识别和行人保护两个功能,行人识别是只识别不减速,行人保护是识别并刹车,这两个功能是在ACC功能之外的,仅仅ACC的话,是无法识别行人的。对于市区环境,行人乱穿马路、电动车骑到机动车道等情况时有发生,使用ACC时还是多注意刹车吧。
ACC安全吗?
这是一个中立的问题,回答也是中立的,正是因为安全,所以车企才会将此功能开放给客户,但又是不安全的,不安全的因素也很多,如恶劣天气、加塞判断不够灵敏、刹车不够及时或力度、前方挂车异行物体判断错误等,同时更有驾驶员自身因素,使用ACC时没有保持警惕,甚至忽略了ACC的报警等。总的来说,建议在路况良好的情况下使用ACC,享受舒适的同时保持警惕,右脚依然不能离开刹车,该刹车时还是要自己主动刹车,这才是ACC正确的使用姿势:)



编辑推荐




最新资讯
-
高效三通道双向电源:释放测试潜能
2025-04-22 09:23
-
R171.01对DCAS的要求⑦
2025-04-22 09:20
-
电磁兼容试验中,什么是工频磁场抗干扰试验
2025-04-22 09:18
-
以标为盾 智护隐私, TC11 TF1加速推进个人
2025-04-22 09:16
-
关注新科技|智狼再发力!京东物流助力汽车
2025-04-22 09:08
