




 广告
广告





















































中国汽研张强:中国智能汽车指数测试研究报告
2019-02-22 09:57:26· 来源:中国汽研汽车工程研发中心

2月20-21日,2019全球第二届自动驾驶论坛在武汉举办,本次论坛以智能驾驶 改变未来为主题。中国汽研智能网联汽车测试研发中心副主任张强发表了主题演讲,演讲内
2月20-21日,2019全球第二届自动驾驶论坛在武汉举办,本次论坛以“智能驾驶 改变未来”为主题。中国汽研智能网联汽车测试研发中心副主任张强发表了主题演讲,演讲内容如下:

中国汽研智能网联汽车测试研发中心副主任 张强
尊敬的各位嘉宾,各位专家下午好!非常感谢咱们盖世汽车组织的2019年的第一个智能网联汽车相关的论坛。我是来自中国汽车工程研究院股份有限公司的张强,刚才周总也介绍了,中国汽研是一个国家级的汽车质量检验和研发第三方服务平台,我今天分享的题目是中国智能汽车指数测评研究进展。我的报告主要分为三个部分,第一,介绍我们智能指数在2018年做的测评结果及分析。第二,详细介绍智能驾驶场景数据库方面的研究进展。第三,智能指数2020版规程研究的进展。这里边可能有很多技术的细节,也希望大家多多关注。
首先来看2018年我们做的工作,我们通过与行业里大部分的主机厂还有零部件企业广泛征求交流意见后,在2018年5月6号正式发布实施了指数的2018版测评规程,主要是做ACC、AEB、LDW、ASD、BSD和APS5个系统,每个系统都是折算成十分进行评价,0到4分是比较差,4到6分是一般,6到8是良好,8到10是优秀。我们所有的规程和每个车型的报告都可以在官方网站上进行下载,也请大家关注官方微信,所有测评相关的进展测评和报告在官方网站微信上都可以进行下载。
在管理办法方面,我们是严格按照测评管理办法执行,所有的测评车型都是我们自主随机从4S店买车,车企和媒体都可以全过程来见证相关试验。我们的宗旨就是想成为一个中立、公正、专业的第三方智能汽车测试评价平台,服务消费者买车用车,引导企业的优化设计。这是我们2018年做车型总览,一共25款,分了三批次来进行相应的测试和发布,可以看到这里边所有的车型都是中国市场上非常主流也是销量非常大的车型,包括了轿车、SUV以及MPV,所有的车型都是我们i-VISTA自主选取和采购的。
因为是分了三批次的结果,而且每个车型都有单独的评价报告,如果一个个展示可能花的时间比较长,所以我们最后就做了一张大表,把三批次的结果做了一个统一的展示,那么可以看到AEB和LDW这两个系统整个的评价来看优秀的占比都非常高,而ACC、BSD还有APS这三个系统因为全球来讲都没有一个统一的评价标准,所以按照我们的评价规程进行测试来看整个差异性是非常大的,像ACC一共21个车型,得到优秀比例应该不到一半,APS同样优秀的比例也是比较低的。后面我会具体来分析一下各系统得分差的原因。
首先来看这些车型的一个大体情况,25个车型最高售价的是特斯拉model S,大概在80万;售价最低的是现代领动是11万元,25个车型的平均售价是26.78万,基本上是中国销量最主流的一个价格了。从统计也可以看到整个ADAS由原来的高配置,向A级车快速下探。
这是具体的一个品牌分布、车型分布以及搭载系统的比例。在品牌方面,欧系、美系和自主都占了大概20%多左右,日系占了16%,韩系占4%,可以来看基本上覆盖了中国车市的主流车型。在车型分布方面,轿车占了40%,SUV也是占了40%多,整个来看轿车跟SUV的数量是基本持平的。从搭载系统个数来看,五个系统全搭载的车型占了不到一半,40%多,四个系统占了36%,三个系统占20%。这里边有一个很有意思的现象,就是25个车型都有AEB,但是自动泊车比较少,日系车只有一款就是本田的雅阁搭载了,日系车在自动泊车这块普及的相对要慢一些。
具体看每个系统,ACC整体得分的差异还是比较大的,平均得分大概是6.44分,优秀、良好、一般和较差分布比较均匀。再看一下共性问题,咱们今天还有昨天的论坛里也有很多零部件企业和整车企业,ACC目前面临最大的一个挑战不是高速部分,而是低速部分和静止工况。现在大部分车型静止工况都是直接滤掉不做的,但是从实际用户体验来讲ACC还是需要解决静止工况,那么从我们测试的车型来看,大概有11款车型能够识别目标,最好的可以做到60公里对零可以跟停,像特斯拉应该可以做到120对零可以跟停,那么这里边的核心技术就是咱们的毫米波雷达跟摄像头这两个传感器的识别能力,昨天蒋总也提到他们下一代第五代的雷达可以做到200米还是300米的一个最远探测距离,就有可能会彻底的解决掉这个问题。
第二是AEB,整体来看基本上都是在优秀水平,只有一款车型得分比较低,主要的原因因为他用的还是上一代的毫米波雷达,所以整个对静止目标不识别。
下一个是LDW整体表现也是比较好的,有21款车型搭载,17款优秀,4款良好。这里的一个共性问题,250米弯道很多车型都没有得分。但是从我们对中国的道路交通环境的研究发现,中国因为整个地形比较复杂,在高速公路的设计标准里山区地带的高速公路的弯道最小设计半径是250米,所以我们建议出于高速行车安全的考虑,在设计LDW的时候应该加强250米弯道半径的识别和报警能力。
BSD,25个车型中有19个车型搭载,得分差异也是比较大的,整体的得分都是比较低,有两个车型是比较高的,都是得到了满分的十分,它们探测的距离比较远,另外它们还有开门警告的功能。另外有三个车型得分比较低,里边有标定的问题,也有传感器性能的原因,所以希望在下一个车型里边能够有所优化。共性的问题就是120超60得分率普遍都偏低,只有25%,主要的原因还是用24GHz毫米波雷达或者超声波雷达这种方案,它的探测能力都是不够的。另外开门警告这个功能,我们目前是作为加分项,得分率只有13%,好像只有四个车型搭载,在我们2020版的规程里会把开门警告作为重点引入的功能进行评价,因为在中国道路交通混行功能是非常实用的一个功能。
自动泊车整体的得分差异也是比较大的,搭载的车型是比较少,可以看到本田的思域、凯美瑞、传祺GS8等都没有搭载自动泊车。整体的得分率方面来看,18款车型中只有一款车型能够识别白色标线车位。上午纵目这边也在讲自主泊车,下一代的自动泊车重点要解决的问题就是这种白色标线车位的识别。对于消费者来说,白色标线车位应该是更容易停进去,而现在的自动泊车对这种车位是完全不知道怎么停,因为它根本看不到。我们在新版的规程里也会着重来增加这类车位,而且会建议主机厂在虑采用超声波雷达和摄像头融合方案来做下一代的自动泊车系统。
第二个部分是介绍我们在智能驾驶场景数据库方面的研究情况。
我们在做智能指数测试工况设定的时候面临一个非常大的挑战,我们定的每一个工况,它是不是真的能够代表中国最典型的一个工况,所以说需要一些基础数据的支撑,同时各个整车厂还有零部件企业做自动驾驶研发的时候,也是需要很多基础数据的支撑,那么为了以上的目的,我们自己也在做自然驾驶数据的采集分析工作。截止目前我们有十余台这种自然驾驶数据采集的车在全国来进行数据采集,目前已经采集了40万公里的数据,覆盖全国二十几个省。现在相应的自然驾驶数据仍然在持续增加,我们的目标是要达到百万公里级的数据,覆盖的驾驶员包括不同年龄、不同性别、不同驾驶风格的驾驶员。
我们已经建成了从驾驶数据采集设备到数据标记软件、数据融合算法、场景提取算法,一直到场景重构算法,八个阶段完整的场景数据处理工具链,可以按照不同的需求进行场景提取跟分析。以下是我们一些具体的案例,这是我们做的中国5类典型泊车场景分析,右边这个图是我们分析的中国车位尺寸问题,实际车位尺寸跟法规要求可能还是有差异。比如说平行车位,法规要求可能是要求长六米,但实际它都会偏短一些、偏宽一些,而垂直车位都是偏窄偏长一些,这样的话相同区域可能就能多停一个车,这是很多建筑的实际车位我们做了统计之后发现了一个很有意思的规律。
第二,我们还在做一些典型巡航场景的切入切出工况分析,这是目前2000余公里自然驾驶数据,人工筛选和标定了300多个前车换道的片段得出的结论。有三个特点,第一,高速公路前车换道的时间一般都不会超过五秒。第二,中国的高速公路前车换道只有10%才使用转向灯。第三,高速公路开始换到时刻,THW时间一般来讲会小于1.5秒,这些数据我们还会继续分析,会逐步的纳入2020版指数评价规程的工况设计之中。
第三,中国典型的危险场景。基于40万公里自然驾驶数据我们提取了100例左右的危险数据,聚类了11类中国典型的危险场景。排在第一位的是在白天没有车道线的十字路口,左边出现一个横穿左转车辆,频次达到25%。第二个工况在乡村道路上,对向车辆街道超车,这种工况在中国也比较普遍,这对未来的自动驾驶算法都是比较大的挑战。
未来我们会在持续优化数采设备,继续进行大规模自然驾驶数据采集以及相应的场景提取工具的优化整合,进一步优化场景库的构建,同时我们还会去做驾驶员行为分析来辅助自动驾驶的研发,同时也会支撑中国国标以及智能指数的制定工作,最后是服务于我们整个智能网联行业。具体可以应用于虚拟仿真测试,比如说软件在环测试、硬件在还测试、车辆在环测试以及场地测试和道路测试。
第三部分是智能指数2020版规程的研究进展。
这里面也给大家做一个简要的汇报,因为相关的工作我们现在还在进行之中。2019年有三件主要的事情。第一,我们还会继续按照2018版规程来做相应的车型评价,会做15到20款车型,分两批发布,第一批应该是在2019年的6月份,第二批是在2019年的11月份,我们已经初步完成测评车型选择,目前正在进行车辆采购工作。第二,我们会进行L2级测评规程的研究工作,我们也会邀请行业的专家还有相关的企业高校来加入,共同探讨测评规程。第三,我们会在2019年下半年发布2020版的规程,引入整体评价,2020年开始正式实施。为什么要引入整体评价?是因为去年我们25个车型发布之后,有相关的媒体把我们五个系统的分数加起来做了一个排名,但这是不够科学严谨的,所以我们会根据自然驾驶数据的研究结果,把这几个系统的分数做加权计算,给出整体评价。下面这张图是整体的推进计划,2020版会增加开门警告、车道保持、行人自动紧急制动、两轮车自动紧急制动以及车道居中交通拥堵、辅助高速自动驾驶辅助和全自动泊车。
这是智能指数2020版规程的体系框架,我们把智能驾驶分为三大板块,第一个板块就是辅助行车,辅助行车主要包括了L1的ACC、车道居中功能以及高速公路辅助L2功能。第二个板块辅助泊车,是指自动泊车功能,当然这里边包括L2还有L2.5。第三个板块辅助安全,主要包括了AEB,AEB包括了车对车、车对弱势群体,弱势群体包括了行人还有自行车。同时我们还会考虑对倒车AEB进行评价。BSD我们会把原来的开门预警有加分项变为测试项,最后一个LDP车到纠偏辅助,我们会增加车道保持LKA的测评。
这是辅助行车规程的初步工况,会分为四大部分,传统的ACC CCRS、CCRM的工况会进行相应调整。在L2的测评里边,会增加切入和切出测试,切出工况暂定为40对30和90对80,切入是50对10和120对80。L2还有直道入弯道工况,曲率半径是250米,同时加分项会考虑如果有L2.5,比如说由人确定的换道辅助功能,会进行加分。同时如果有抬头显示能够显示ACC或者L2相关内容,也会给予相应加分。在观察项里边,我们会对L2系统的脱手报警策略以及说明书、官方广告视频进行分析,看有没有虚假宣传、过度宣传。
这是目前目标车切出工况摸底测试的具体结果。整体来讲这个工况就是前面有一辆静止的目标车,然后这是一个运动车辆,这是我们的被测主车,然后在一个合适的时间点运动车辆会切出去,然后看主车在运动车辆切出之后对静止车辆的识别情况。四个车型在不同的速度点差别比较大,有的工况AEB和ACC完全没有作用,有的工况ACC可以舒适地刹车到静止,还有的工况直接触发AEB。
这是脱手报警时序摸底测试的具体结果,可以看到不同的速度,同一个车的脱手报警策略还是有一定的差异,未来在我们的规程里面可能会考虑固定一个速度,比如说70公里的直道工况测试脱手报警策略。
辅助泊车方面,根据场景库的研究结果,就是中国的车位尺寸普遍都是要偏小一些,而且长度和宽度大致反比这个趋势,规程也会进行相应的优化。在搜索能力方面,会把双边界车位这种简单工况直接就去掉,增加白色划线斜向车位和单边界斜向车位。在泊车能力方面,会把所有的大车位都删除,增加白色划线车位,同时也会增加一侧是方柱一侧是车辆的垂直车位的典型中国地下车位来进行评价。
以上是我们整个二级自动驾驶规程研究的情况,在最后我也分享一下美国和欧洲在ADAS方面测评方面的最新动态。这是美国IIHS对ADAS测评的情况,他们在2018年的8月7号发布了L2自动驾驶的评估测试报告,对沃尔沃S90,奔驰E级,宝马五系,特斯拉model3、model S5款车型,做了ACC跟主动车道保持两个功能。ACC的场景跟我们之前做的ACC大体相似,分了四个场景,第一,关ACC打开AEB,第二个是ACC、AEB同时开,第三个低速跟车,第四个前车切出,然后有静止车辆。这是ACC的情况,它的结论就是ACC比人更擅长在中远距离高速情况下的控制。第二个就是车道保持,做了三个路段六次测试,model3是结果最好,宝马五系结果最差,LKA车道居中功能没有ACC可靠。IIHS也正在做ADAS的评分机制,未来有可能会对ADAS进行相应的评价。
Euro NCAP是在2018年10月18日公布了ACC和车道居中相结合的L2及自动驾驶辅助系统的研究性测试结果,一共做了十个车型,涵盖了美系、欧系、日系、韩系,所有的主流车系。ACC工况跟我们之前做的L2差不多,包括了目标车静止、目标车低速、目标车减速以及切入切出。车道居中两个工况,一个是驶入S弯,一个就是躲避障碍物。Euro CNAP并没有给出分数,每个车都给了一个报告。Euro NCAP给出了几点结论。第一,现在市场上没有一个完全自主的自动驾驶车辆。第二,所有L2系统都是辅助系统。第三,L2功能可以辅助车辆保持在车道内,但是要在设计范围内使用,不同的主机厂都会用不同的方法来实现。第四,测试结果凸显了不同主机厂的技术能力以及不同水平。我们认为Euro NCAP有两点值得参考,第一,本次测评没有采用计分方式,而且自动化程度高的像特斯拉,评价不一定是最优,有可能使人产生过度依赖。第二,Euro NCAP可能会在2020年要做自动驾驶评价,这是我们的一个推测。
以上就是智能指数最新的研究进展情况。智能指数是全球第一个做ADAS或者智能汽车的公开评价体系,没有任何参考借鉴,对我们来讲充满了很大的挑战,同时我们认为这更是一种使命感,智能网联汽车或者说自动驾驶汽车是中国汽车行业并道超车最后的机会,我们也希望在这个过程中能够充分发挥第三方服务平台以及央企的重要作用,推动中国汽车产业的健康发展。以上是我的汇报,感谢大家。
中国汽研智能网联汽车测试研发中心副主任 张强
尊敬的各位嘉宾,各位专家下午好!非常感谢咱们盖世汽车组织的2019年的第一个智能网联汽车相关的论坛。我是来自中国汽车工程研究院股份有限公司的张强,刚才周总也介绍了,中国汽研是一个国家级的汽车质量检验和研发第三方服务平台,我今天分享的题目是中国智能汽车指数测评研究进展。我的报告主要分为三个部分,第一,介绍我们智能指数在2018年做的测评结果及分析。第二,详细介绍智能驾驶场景数据库方面的研究进展。第三,智能指数2020版规程研究的进展。这里边可能有很多技术的细节,也希望大家多多关注。
首先来看2018年我们做的工作,我们通过与行业里大部分的主机厂还有零部件企业广泛征求交流意见后,在2018年5月6号正式发布实施了指数的2018版测评规程,主要是做ACC、AEB、LDW、ASD、BSD和APS5个系统,每个系统都是折算成十分进行评价,0到4分是比较差,4到6分是一般,6到8是良好,8到10是优秀。我们所有的规程和每个车型的报告都可以在官方网站上进行下载,也请大家关注官方微信,所有测评相关的进展测评和报告在官方网站微信上都可以进行下载。
在管理办法方面,我们是严格按照测评管理办法执行,所有的测评车型都是我们自主随机从4S店买车,车企和媒体都可以全过程来见证相关试验。我们的宗旨就是想成为一个中立、公正、专业的第三方智能汽车测试评价平台,服务消费者买车用车,引导企业的优化设计。这是我们2018年做车型总览,一共25款,分了三批次来进行相应的测试和发布,可以看到这里边所有的车型都是中国市场上非常主流也是销量非常大的车型,包括了轿车、SUV以及MPV,所有的车型都是我们i-VISTA自主选取和采购的。
因为是分了三批次的结果,而且每个车型都有单独的评价报告,如果一个个展示可能花的时间比较长,所以我们最后就做了一张大表,把三批次的结果做了一个统一的展示,那么可以看到AEB和LDW这两个系统整个的评价来看优秀的占比都非常高,而ACC、BSD还有APS这三个系统因为全球来讲都没有一个统一的评价标准,所以按照我们的评价规程进行测试来看整个差异性是非常大的,像ACC一共21个车型,得到优秀比例应该不到一半,APS同样优秀的比例也是比较低的。后面我会具体来分析一下各系统得分差的原因。
首先来看这些车型的一个大体情况,25个车型最高售价的是特斯拉model S,大概在80万;售价最低的是现代领动是11万元,25个车型的平均售价是26.78万,基本上是中国销量最主流的一个价格了。从统计也可以看到整个ADAS由原来的高配置,向A级车快速下探。
这是具体的一个品牌分布、车型分布以及搭载系统的比例。在品牌方面,欧系、美系和自主都占了大概20%多左右,日系占了16%,韩系占4%,可以来看基本上覆盖了中国车市的主流车型。在车型分布方面,轿车占了40%,SUV也是占了40%多,整个来看轿车跟SUV的数量是基本持平的。从搭载系统个数来看,五个系统全搭载的车型占了不到一半,40%多,四个系统占了36%,三个系统占20%。这里边有一个很有意思的现象,就是25个车型都有AEB,但是自动泊车比较少,日系车只有一款就是本田的雅阁搭载了,日系车在自动泊车这块普及的相对要慢一些。
具体看每个系统,ACC整体得分的差异还是比较大的,平均得分大概是6.44分,优秀、良好、一般和较差分布比较均匀。再看一下共性问题,咱们今天还有昨天的论坛里也有很多零部件企业和整车企业,ACC目前面临最大的一个挑战不是高速部分,而是低速部分和静止工况。现在大部分车型静止工况都是直接滤掉不做的,但是从实际用户体验来讲ACC还是需要解决静止工况,那么从我们测试的车型来看,大概有11款车型能够识别目标,最好的可以做到60公里对零可以跟停,像特斯拉应该可以做到120对零可以跟停,那么这里边的核心技术就是咱们的毫米波雷达跟摄像头这两个传感器的识别能力,昨天蒋总也提到他们下一代第五代的雷达可以做到200米还是300米的一个最远探测距离,就有可能会彻底的解决掉这个问题。
第二是AEB,整体来看基本上都是在优秀水平,只有一款车型得分比较低,主要的原因因为他用的还是上一代的毫米波雷达,所以整个对静止目标不识别。
下一个是LDW整体表现也是比较好的,有21款车型搭载,17款优秀,4款良好。这里的一个共性问题,250米弯道很多车型都没有得分。但是从我们对中国的道路交通环境的研究发现,中国因为整个地形比较复杂,在高速公路的设计标准里山区地带的高速公路的弯道最小设计半径是250米,所以我们建议出于高速行车安全的考虑,在设计LDW的时候应该加强250米弯道半径的识别和报警能力。
BSD,25个车型中有19个车型搭载,得分差异也是比较大的,整体的得分都是比较低,有两个车型是比较高的,都是得到了满分的十分,它们探测的距离比较远,另外它们还有开门警告的功能。另外有三个车型得分比较低,里边有标定的问题,也有传感器性能的原因,所以希望在下一个车型里边能够有所优化。共性的问题就是120超60得分率普遍都偏低,只有25%,主要的原因还是用24GHz毫米波雷达或者超声波雷达这种方案,它的探测能力都是不够的。另外开门警告这个功能,我们目前是作为加分项,得分率只有13%,好像只有四个车型搭载,在我们2020版的规程里会把开门警告作为重点引入的功能进行评价,因为在中国道路交通混行功能是非常实用的一个功能。
自动泊车整体的得分差异也是比较大的,搭载的车型是比较少,可以看到本田的思域、凯美瑞、传祺GS8等都没有搭载自动泊车。整体的得分率方面来看,18款车型中只有一款车型能够识别白色标线车位。上午纵目这边也在讲自主泊车,下一代的自动泊车重点要解决的问题就是这种白色标线车位的识别。对于消费者来说,白色标线车位应该是更容易停进去,而现在的自动泊车对这种车位是完全不知道怎么停,因为它根本看不到。我们在新版的规程里也会着重来增加这类车位,而且会建议主机厂在虑采用超声波雷达和摄像头融合方案来做下一代的自动泊车系统。
第二个部分是介绍我们在智能驾驶场景数据库方面的研究情况。
我们在做智能指数测试工况设定的时候面临一个非常大的挑战,我们定的每一个工况,它是不是真的能够代表中国最典型的一个工况,所以说需要一些基础数据的支撑,同时各个整车厂还有零部件企业做自动驾驶研发的时候,也是需要很多基础数据的支撑,那么为了以上的目的,我们自己也在做自然驾驶数据的采集分析工作。截止目前我们有十余台这种自然驾驶数据采集的车在全国来进行数据采集,目前已经采集了40万公里的数据,覆盖全国二十几个省。现在相应的自然驾驶数据仍然在持续增加,我们的目标是要达到百万公里级的数据,覆盖的驾驶员包括不同年龄、不同性别、不同驾驶风格的驾驶员。
我们已经建成了从驾驶数据采集设备到数据标记软件、数据融合算法、场景提取算法,一直到场景重构算法,八个阶段完整的场景数据处理工具链,可以按照不同的需求进行场景提取跟分析。以下是我们一些具体的案例,这是我们做的中国5类典型泊车场景分析,右边这个图是我们分析的中国车位尺寸问题,实际车位尺寸跟法规要求可能还是有差异。比如说平行车位,法规要求可能是要求长六米,但实际它都会偏短一些、偏宽一些,而垂直车位都是偏窄偏长一些,这样的话相同区域可能就能多停一个车,这是很多建筑的实际车位我们做了统计之后发现了一个很有意思的规律。
第二,我们还在做一些典型巡航场景的切入切出工况分析,这是目前2000余公里自然驾驶数据,人工筛选和标定了300多个前车换道的片段得出的结论。有三个特点,第一,高速公路前车换道的时间一般都不会超过五秒。第二,中国的高速公路前车换道只有10%才使用转向灯。第三,高速公路开始换到时刻,THW时间一般来讲会小于1.5秒,这些数据我们还会继续分析,会逐步的纳入2020版指数评价规程的工况设计之中。
第三,中国典型的危险场景。基于40万公里自然驾驶数据我们提取了100例左右的危险数据,聚类了11类中国典型的危险场景。排在第一位的是在白天没有车道线的十字路口,左边出现一个横穿左转车辆,频次达到25%。第二个工况在乡村道路上,对向车辆街道超车,这种工况在中国也比较普遍,这对未来的自动驾驶算法都是比较大的挑战。
未来我们会在持续优化数采设备,继续进行大规模自然驾驶数据采集以及相应的场景提取工具的优化整合,进一步优化场景库的构建,同时我们还会去做驾驶员行为分析来辅助自动驾驶的研发,同时也会支撑中国国标以及智能指数的制定工作,最后是服务于我们整个智能网联行业。具体可以应用于虚拟仿真测试,比如说软件在环测试、硬件在还测试、车辆在环测试以及场地测试和道路测试。
第三部分是智能指数2020版规程的研究进展。
这里面也给大家做一个简要的汇报,因为相关的工作我们现在还在进行之中。2019年有三件主要的事情。第一,我们还会继续按照2018版规程来做相应的车型评价,会做15到20款车型,分两批发布,第一批应该是在2019年的6月份,第二批是在2019年的11月份,我们已经初步完成测评车型选择,目前正在进行车辆采购工作。第二,我们会进行L2级测评规程的研究工作,我们也会邀请行业的专家还有相关的企业高校来加入,共同探讨测评规程。第三,我们会在2019年下半年发布2020版的规程,引入整体评价,2020年开始正式实施。为什么要引入整体评价?是因为去年我们25个车型发布之后,有相关的媒体把我们五个系统的分数加起来做了一个排名,但这是不够科学严谨的,所以我们会根据自然驾驶数据的研究结果,把这几个系统的分数做加权计算,给出整体评价。下面这张图是整体的推进计划,2020版会增加开门警告、车道保持、行人自动紧急制动、两轮车自动紧急制动以及车道居中交通拥堵、辅助高速自动驾驶辅助和全自动泊车。
这是智能指数2020版规程的体系框架,我们把智能驾驶分为三大板块,第一个板块就是辅助行车,辅助行车主要包括了L1的ACC、车道居中功能以及高速公路辅助L2功能。第二个板块辅助泊车,是指自动泊车功能,当然这里边包括L2还有L2.5。第三个板块辅助安全,主要包括了AEB,AEB包括了车对车、车对弱势群体,弱势群体包括了行人还有自行车。同时我们还会考虑对倒车AEB进行评价。BSD我们会把原来的开门预警有加分项变为测试项,最后一个LDP车到纠偏辅助,我们会增加车道保持LKA的测评。
这是辅助行车规程的初步工况,会分为四大部分,传统的ACC CCRS、CCRM的工况会进行相应调整。在L2的测评里边,会增加切入和切出测试,切出工况暂定为40对30和90对80,切入是50对10和120对80。L2还有直道入弯道工况,曲率半径是250米,同时加分项会考虑如果有L2.5,比如说由人确定的换道辅助功能,会进行加分。同时如果有抬头显示能够显示ACC或者L2相关内容,也会给予相应加分。在观察项里边,我们会对L2系统的脱手报警策略以及说明书、官方广告视频进行分析,看有没有虚假宣传、过度宣传。
这是目前目标车切出工况摸底测试的具体结果。整体来讲这个工况就是前面有一辆静止的目标车,然后这是一个运动车辆,这是我们的被测主车,然后在一个合适的时间点运动车辆会切出去,然后看主车在运动车辆切出之后对静止车辆的识别情况。四个车型在不同的速度点差别比较大,有的工况AEB和ACC完全没有作用,有的工况ACC可以舒适地刹车到静止,还有的工况直接触发AEB。
这是脱手报警时序摸底测试的具体结果,可以看到不同的速度,同一个车的脱手报警策略还是有一定的差异,未来在我们的规程里面可能会考虑固定一个速度,比如说70公里的直道工况测试脱手报警策略。
辅助泊车方面,根据场景库的研究结果,就是中国的车位尺寸普遍都是要偏小一些,而且长度和宽度大致反比这个趋势,规程也会进行相应的优化。在搜索能力方面,会把双边界车位这种简单工况直接就去掉,增加白色划线斜向车位和单边界斜向车位。在泊车能力方面,会把所有的大车位都删除,增加白色划线车位,同时也会增加一侧是方柱一侧是车辆的垂直车位的典型中国地下车位来进行评价。
以上是我们整个二级自动驾驶规程研究的情况,在最后我也分享一下美国和欧洲在ADAS方面测评方面的最新动态。这是美国IIHS对ADAS测评的情况,他们在2018年的8月7号发布了L2自动驾驶的评估测试报告,对沃尔沃S90,奔驰E级,宝马五系,特斯拉model3、model S5款车型,做了ACC跟主动车道保持两个功能。ACC的场景跟我们之前做的ACC大体相似,分了四个场景,第一,关ACC打开AEB,第二个是ACC、AEB同时开,第三个低速跟车,第四个前车切出,然后有静止车辆。这是ACC的情况,它的结论就是ACC比人更擅长在中远距离高速情况下的控制。第二个就是车道保持,做了三个路段六次测试,model3是结果最好,宝马五系结果最差,LKA车道居中功能没有ACC可靠。IIHS也正在做ADAS的评分机制,未来有可能会对ADAS进行相应的评价。
Euro NCAP是在2018年10月18日公布了ACC和车道居中相结合的L2及自动驾驶辅助系统的研究性测试结果,一共做了十个车型,涵盖了美系、欧系、日系、韩系,所有的主流车系。ACC工况跟我们之前做的L2差不多,包括了目标车静止、目标车低速、目标车减速以及切入切出。车道居中两个工况,一个是驶入S弯,一个就是躲避障碍物。Euro CNAP并没有给出分数,每个车都给了一个报告。Euro NCAP给出了几点结论。第一,现在市场上没有一个完全自主的自动驾驶车辆。第二,所有L2系统都是辅助系统。第三,L2功能可以辅助车辆保持在车道内,但是要在设计范围内使用,不同的主机厂都会用不同的方法来实现。第四,测试结果凸显了不同主机厂的技术能力以及不同水平。我们认为Euro NCAP有两点值得参考,第一,本次测评没有采用计分方式,而且自动化程度高的像特斯拉,评价不一定是最优,有可能使人产生过度依赖。第二,Euro NCAP可能会在2020年要做自动驾驶评价,这是我们的一个推测。
以上就是智能指数最新的研究进展情况。智能指数是全球第一个做ADAS或者智能汽车的公开评价体系,没有任何参考借鉴,对我们来讲充满了很大的挑战,同时我们认为这更是一种使命感,智能网联汽车或者说自动驾驶汽车是中国汽车行业并道超车最后的机会,我们也希望在这个过程中能够充分发挥第三方服务平台以及央企的重要作用,推动中国汽车产业的健康发展。以上是我的汇报,感谢大家。





最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
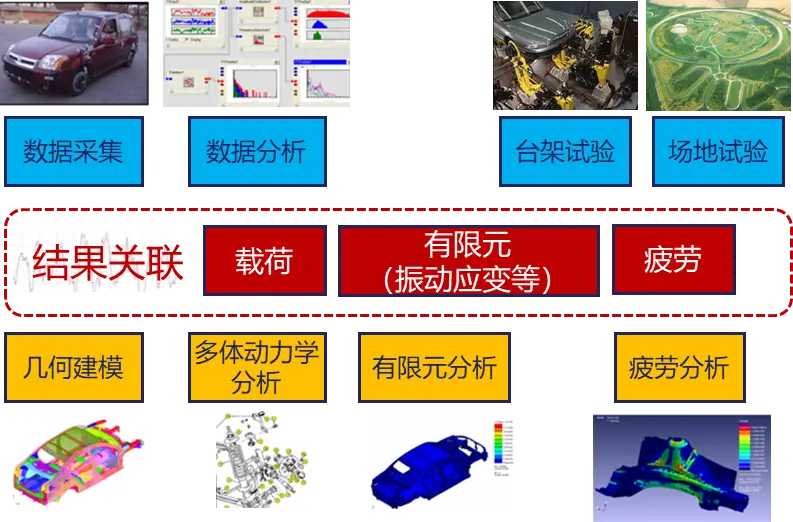
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
