




 广告
广告





















































大众、英伟达、博世、大陆组建NAV联盟
2019-02-28 23:34:04· 来源:佐思汽车研究

大众集团、Aquantia、英伟达、博世以及大陆组成了一个联盟,致力于解决实现自动驾驶的高难度技术性问题。该联盟名为自动驾驶汽车网络联盟(Networkingfor Autono
大众集团、Aquantia、英伟达、博世以及大陆组成了一个联盟,致力于解决实现自动驾驶的高难度技术性问题。该联盟名为自动驾驶汽车网络联盟(Networkingfor Autonomous Vehicles Alliance, 以下简称NAV联盟),将主要研究一些复杂的内容,例如:改善电子电气架构和数据网络的组成,从而使车辆能传输更大量的数据。该联盟希望能够吸引其它汽车制造商及供应商的参与,共同推动自动驾驶技术发展。
本文是来自NAV联盟的研究成果。

自动驾驶汽车开启汽车行业新纪元,将面临人类对于自动驾驶车辆的信任挑战,因此需要零故障的安全系统,解决方案就是为关键元件和互联连接构建足够冗余。
L2-L3阶段需要1-10 TFLOPS的算力,1-10 Gbit/s的网络传输速度。L4-L5阶段需要10-100+TFLOPS的算力,10-25+Gbit/s的网络传输速度。

传感器融合和海量的数据驱动带宽到多千兆(Multi-Gig)级别。譬如,摄像头分辨率从720p提高到4K并且提升了动态范围,相当于增加了多千兆比特的原始带宽。
传感器融合中,数据从多个传感器汇总到中央GPU的过程,也相当于在网络中增加了多千兆比特的数据流。
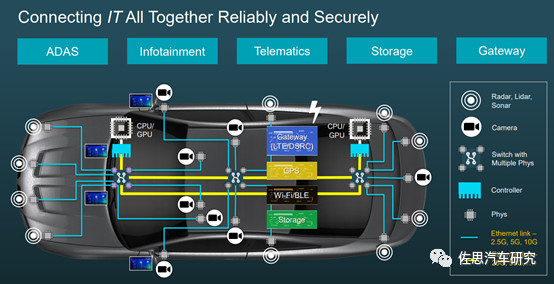
需要可靠安全地连接所有车内IT设备,譬如ADAS系统、娱乐系统、远程信息处理系统、存储设备、网关等。
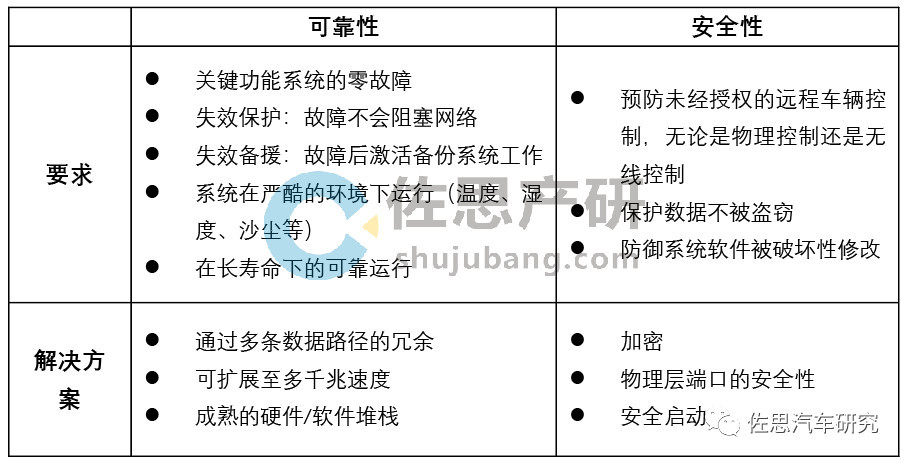
对自动驾驶汽车网络的额外要求如下:
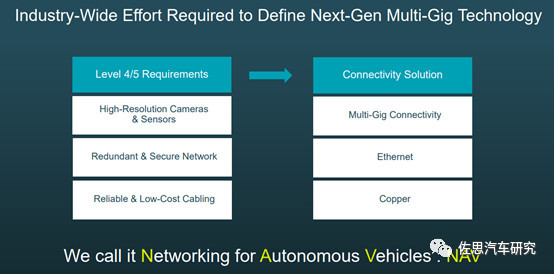
对于定义下一代多千兆技术,全行业需要做出如下努力:

我们称之为自动驾驶汽车网络:NAV (Networking for Autonomous Vehicles)。
NAV联盟由AQUANTIA、博世、大陆集团、英伟达、大众创立,旨在为汽车行业提供一个平台,以发展下一代自动驾驶汽车车内网络基础设施,同时促进网络技术以及网络产品的大量部署,保证网络的互通性、安全性以及可靠性。
NAV联盟的目标是:
- 为下一代多千兆以太网汽车网络发展生态系统
- 建立步骤和规格以确保网络的互通性、安全性以及可靠性
- 提升紧随新规格的最佳实践和解决方案
- 建立标准机构联络
- 组织市场活动,以提升认知并培训市场和用户
NAV联盟包括如下技术工作组:系统控制和管理工作组,25G和50G汽车以太网物理层规格工作组,以太网协议封装工作组,电磁兼容性需求与限制工作组,物理层系统与元件集成化工作组。
系统控制和管理工作组
- 范围:该工作组定义了车内网络构成部分和特征与可管理性。因此,工作组确定了支持自动驾驶汽车系统的硬件和软件界面的推荐范围。这个工作组还阐述了汽车网络管理协议,该协议包括了增强诊断、预见性维护、冗余、服务质量、唤醒和休眠以及设备管理的额外考虑。
- 起始日期:2018年12月
- 主席:Helge Zinner, 大陆集团
25G和50G汽车以太网物理层规格工作组
- 范围:该工作组为应用于汽车以太网络的25Gbps和50Gbps的电气界面建立物理层规格以及管理参数。
- 起始日期:2018年11月27日
- 主席:Ramin Farjad, Aquantia
以太网协议封装工作组
- 范围:这个工作组以一种向后兼容的方式定义了多种以太网帧内协议的标准封装。封装的初始目标协议是I2C,SPI,CSI2, 例如雷达,激光雷达的应用。
- 起始日期:2018年12月
- 主席:Mrudula Kanuri, 英伟达
电磁兼容性需求与限制工作组
- 范围:在2.5Gbps, 5Gbps, 10Gbps, 25Gbps以及50Gbps内,两个以太网端口之间数据交换通道电磁兼容性的条件与限制的规格。
- 起始日期:2018年11月29日
- 主席:Jundi Ramzi, 大众集团
物理层系统与元件集成化工作组
- 范围:该工作组详细说明了在一个汽车ECU或者一个EVC(Electronic Vehicle Computer)内汽车多千兆物理层端口的集成。
- 起始日期:2018年12月
- 主席:Olaf Grau, 博世
- 下一篇:众泰T600完成车顶强度试验
- 上一篇:实车、台架功能测试介绍



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
