




 广告
广告





















































极寒地区自动驾驶汽车的本地化面临哪些挑战?
2019-04-27 22:48:40· 来源:网优雇佣军

本文讲解了北极圈附近的地区在特殊的温度和纬度下,无人车是如何实现定位的。北纬地区自动驾驶汽车(AV)和自动驾驶(AD)应用的本地化存在许多挑战。主要的挑战
本文讲解了北极圈附近的地区在特殊的温度和纬度下,无人车是如何实现定位的。
北纬地区自动驾驶汽车(AV)和自动驾驶(AD)应用的本地化存在许多挑战。主要的挑战是严酷的冬季天气,这限制了视觉传感器的实用性—雪,雾和黑暗对这些传感器产生不利影响,同时极端低温会影响传感器性能。道路上的冰雪会让车轮打滑,降低车轮传感器的精度。
从全球导航卫星系统的角度来看,卫星系统和卫星增强系统(SBAS)的能见度有限,而更活跃的电离层则阻碍了高精度全球导航卫星系统的定位。北极地区的全球导航卫星系统干扰监测网络也很小,意味着在没有替代解决方案来提高鲁棒性的情况下,定位系统容易受到攻击。
在基础设施方面,宽带蜂窝网络的连接是地图更新和交通信息所必需的。在欧洲北极无人居住区域(如挪威北部,芬兰和瑞典)缺乏高质量和详细的地图,这限制了基于LiDAR和相机绝对定位方法的有用性。此外,人口稀少地区的交通基础设施不会定期更新,因此限制了潜在的市场机会。
本文描述了欧洲航天局支持的一项名为Arctic-PNT创新平台的研究项目,它是如何使用芬兰北部和挪威特殊路段信号和校正数据让导航更确定可用的。
Aurora Borealis智慧走廊

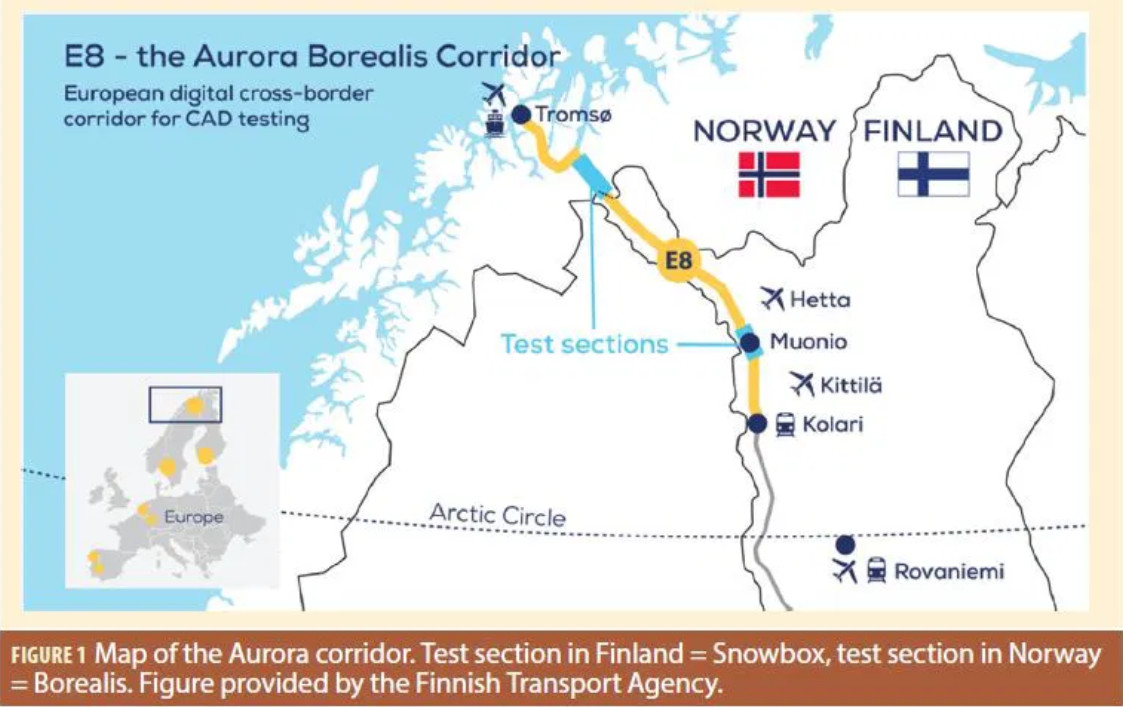
为了解决上述许多挑战,沿着E8高速公路建立的Aurora Borealis智能走廊(“Aurora”)旨在验证北极条件下的自动驾驶车辆平台。它包括芬兰境内的Snowbox 智慧道路和挪威境内的Borealis智慧道路。在这些智慧道路上部署和提供多种基础设施,以便为自动驾驶车提供精确的绝对定位能力。作为此项活动的一部分,芬兰地理空间研究所(FGI)的一组研究人员使用由芬兰VTT技术研究中心的 RobotCar Crew 开发的名为 Martti 的实验自动驾驶汽车,记录了2018年3月的相关定位数据。
VTT成立于1942年,是北欧地区最大的综合研究机构,它基于大众途锐开发了一辆自动驾驶原型车Martti,并在芬兰北部进行了测试。VTT也可能是第一家完全在积雪道路上进行测试的自动驾驶公司,因为Waymo和Yandex的车只是在薄薄的积雪路面上进行了测试。它的定位方案结合了GPS,北斗,Glonass,里程计和基于Wifi的定位。
如图1所示,10公里长的Snowbox测试路段位于西部(芬兰)拉普兰的Muonio,35公里长的挪威北极光测试部分位于Skibotn和芬兰边境Kilpisjärvi 之间。在Snowbox测试道路的下方和下方安装了专用仪表,用于感应道路状况和过往车辆的类别。此外,该区域中的实体为所有主要GNSS星座提供高质量通信网络(例如LTE和5G前测试网络)和精确定位服务。即使卫星仅在高度可见低于10°的条件下,也可以使用EGNOS。
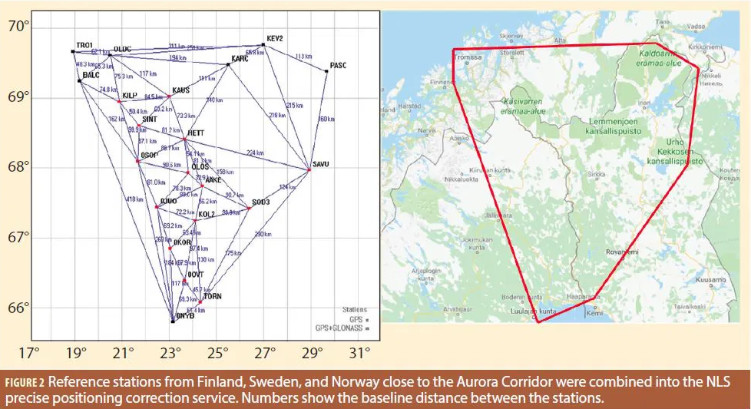
图2显示了芬兰,瑞典和挪威的参考站如何在国家土地测量局的精确定位服务中合并,可以在Aurora走廊区域提供量身定制的校正服务。
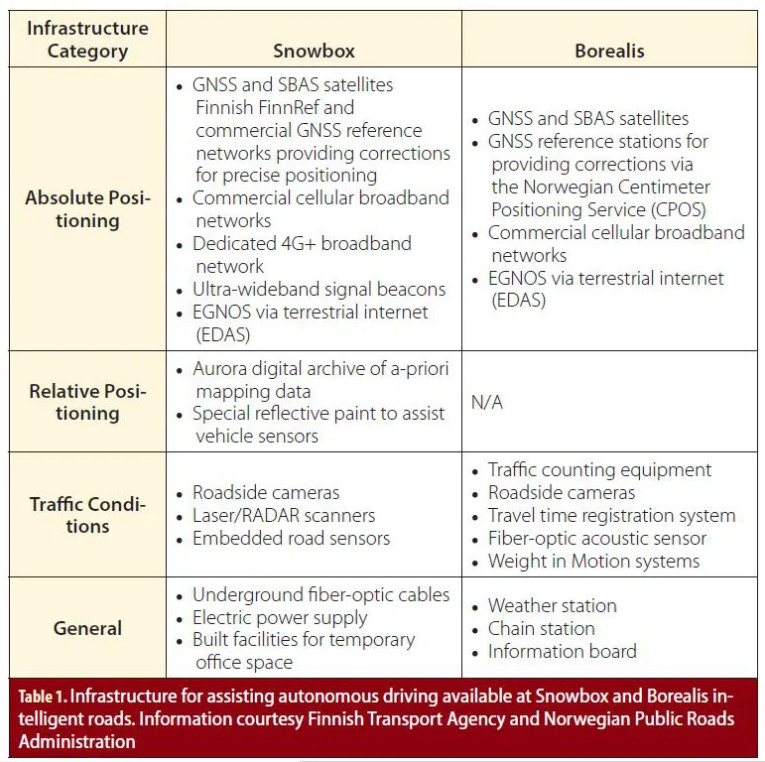
最后,Snowbox 提供了道路和周围环境的高清地图资源,超宽带信标可用于GNSS独立的精确定位。Aurora Snowbox 中的数据和服务可供潜在用户免费使用。表1总结了Snowbox和Borealis的可用基础设施。
自动驾驶汽车中精确绝对定位的最低操作要求
根据文献调查,自动驾驶中绝对定位性能的最低操作要求没有单一的标准定义。欧洲GNSS机构(GSA)最近发布了一份关于道路使用者需求和要求的报告,该报告基于通过欧洲GNSS用户咨询平台进行的研究,表2显示了本报告中定义的AD中绝对定位的不同用户要求类别的摘要。
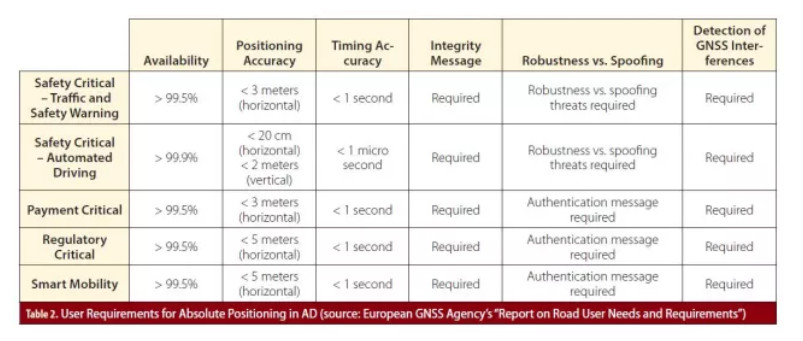
可以看出,自动驾驶要求位置估计的水平精度约为20厘米,95%置信度和可用性优于99.9%。因此,Arctic-PNT项目中第一阶段数据分析的目的就是调查Snowbox使用GNSS,SBAS以及使用参考网络校正数据的精确定位是否可以达到这种精度和可用性性能水平。请注意,使用其他本地化技术和完整性性能验证定位性能超出了实验活动的范围,但不在此范围内。
实地测量
测量活动在2018年3月26日至28日期间进行了三天,当时Snowbox测试道路上仍有相当多的积雪。每天在多个时间记录数据,以确保记录天气,路面,能见度,卫星几何形状,电离层以及动物和车辆交通等的各种条件。有一天保留在挪威境内的北欧化工测试路线上进行数据记录。使用专用级专业级GNSS接收器和高级惯性测量单元(IMU)计算参考轨迹。
VTT实验自动驾驶汽车Martti用于测量活动,这是一辆大众途锐,配备了全自动操作所需的传感器,执行器和控制系统。传感器套件包括GNSS接收器,环境感知传感器(RADAR,LiDAR和摄像头),车辆动力学传感器以及用于来自车辆内置传感器的数据流的CAN总线连接。此外,ITS-G5和蜂窝LTE通信设备也可用。传感器数据可通过车辆内的以太网读取。请注意,尽管记录了来自不同传感器的数据,但在测量活动期间手动驱动车辆。
在实验中使用了大众市场和专业级接收器,并且向所有接收器(包括参考接收器)提供了相同的天线输入。大众市场接收器不能处理精确的定位校正数据,因此主要用于标准的GNSS定位。此外,专业级接收机能够实时处理DGNSS和RTK校正,但不能处理基于状态空间表示(SSR)的PPP校正。因此,DGNSS和RTK处理是实时执行的,而PPP处理是在使用FGI开发的内部基于Matlab的FGI-GSRx软件导航引擎后执行的。
通过在Aurora Snowbox和Borealis智能道路以及沿其部署的各种基础设施下采集数据对比绝对误差数据,使用专业级天线接收进行精确的点定位和网络RTK校正,可以在动态条件下满足精度和可用性要求。与此同时,特别是在穿越国际边界或SBAS卫星可见时,通过蜂窝数据提供GNSS校正数据,确定了误差,为自动驾驶汽车在本地行驶做了充分的数据验证。
总结
这是一个很有意思的项目,它在北极附近做自动驾驶实验。要知道,北极除了温度很低影响传感器性能以外,那里的GPS信号往往是失效的。在这种极端情况下就要探索新的定位方法,目前的方法主要有通过实现多信到L频率波段,用惯导与卫星导航配对,弥补电离层闪烁导致的数据缺口;还有就是增加地球轨道增强卫星星座等方法。总而言之,在北极附近做无人车是个巨大的考验。



编辑推荐




最新资讯
-
高强度碰撞下电控门锁的可靠性思考
2025-04-08 14:26
-
一文解析汽车控制器软件开发过程中的测试
2025-04-08 14:25
-
纯电续航160公里,ReVolt增程电动重卡在美
2025-04-08 14:22
-
FLIR E8 Pro热像仪:汽车漏水检测的“火眼
2025-04-08 10:34
-
德法英日韩之后,瑞士也允许L3上路了
2025-04-08 07:56
