




 广告
广告





















































浅析自动驾驶的重要一环:感知系统发展现状与方向
2019-04-29 21:40:33· 来源:2030出行研究室

在自动驾驶控制系统的架构当中,自动驾驶车辆的感知系统和定位系统作为车辆路径规划的依据,是至关重要的两个环节。最近将详细介绍自动驾驶车辆的感知系统和定位
在自动驾驶控制系统的架构当中,自动驾驶车辆的感知系统和定位系统作为车辆路径规划的依据,是至关重要的两个环节。最近将详细介绍自动驾驶车辆的感知系统和定位系统的基本结构、发展现状和未来发展方向。本文将从感知系统的传感器技术讲起。
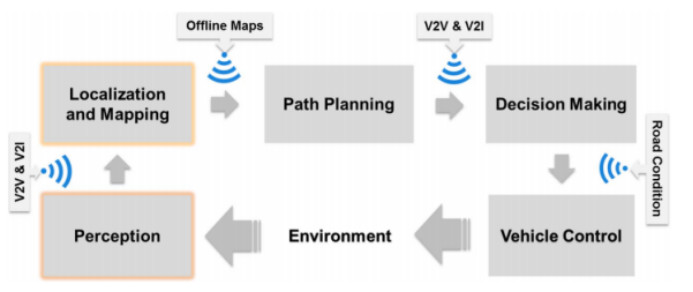
自动驾驶控制系统循环架构
一、传感器分类
自动驾驶车辆上所配备的传感器可分为三大类:
· 自感应传感器(Self-senseing):自感知使用本体感应传感器(Proprioceptive Sensor)来测量车辆的当前状态,包括车辆的速度,加速度,横摆和转向角。本体感应信息通常使用预先安装的测量单元来确定,例如里程表,惯性测量单元(IMU),陀螺仪(Gyroscopes)和来自控制器局域网(CAN)总线的信息。

惯性测量单元及其原理示意简图
· 定位传感器(Localization):定位传感器使用GPS等外部传感器(Exteroceptive Sensor)或惯性测量单元读数的航位推算进行定位,可以确定车辆的全球和本地位置。
定位通常使用传感器的组合,例如GPS,IMU,里程表和相机(通过基元和地图之间的匹配,即SLAM)获得高精度结果。来自多个传感器的数据融合可以最大限度地减少单个传感器的缺点,并提高系统的可靠性和稳健性。
低成本的IMU,可以在短时间内可靠地定位(例如通过隧道时),GPS可以长时间可靠地定位,但在远程区域或通过隧道时可能会失去连接,IMU和GPS这对黄金组合的使用可以有效地减少定位误差和在GPS中断期间提供定位信息)。
· 环境感知传感器(Surrounding-sensing ):环境感知传感器使用外部感知传感器来感知道路标记,道路坡度,交通标志,天气状况,障碍物的状态(位置,速度,加速度等),包括其他车辆,甚至是驾驶员的状态(困倦,疲劳等)。
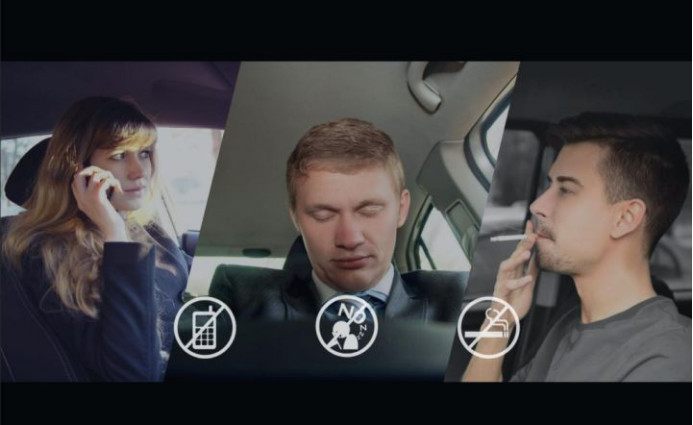
驾驶员状态检测
本体传感器(Proprioceptive Sensor)和外部感受器(Exteroceptive Sensor)可分为:
· 有源传感器(Active sensor):有源传感器通常是以电磁波的形式发射能量并测量返回时间以确定诸如距离之类的参数。包括声纳,雷达和光检测和测距(LIDAR)传感器。
· 无源传感器(Passive Seosor):无源传感器不发射信号,而是感知环境中已经存在的电磁波例如,基于光的和红外的相机。
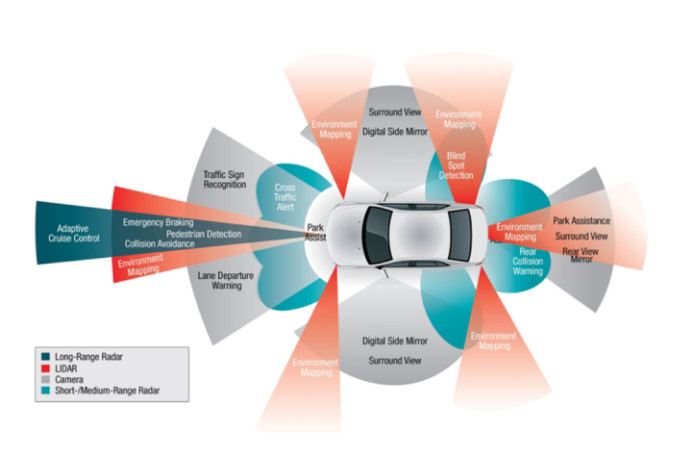
自动驾驶系统传感器种类功能示意图
二、传感器感知领域的几大挑战
· 在恶劣天气条件下(如雪,大雨和雾)的感知
在极端恶劣天气条件下的感知是如今自动驾驶感知领域所面临的一个重要挑战。因为即使对于人类驾驶员来说,这些情景也是十分具有挑战性的。
-在白雪皑皑的条件下,无论是基于视觉的系统还是基于基于LiDAR的系统都存在感知困难。许多基于视觉的自动驾驶感知系统都依赖于观察道路标记来导航道路。然而,一层薄薄的雪可能会导致这些标记完全消失。此外,即使是模糊,肮脏,磨损或涂漆的道路标记(没有雪况)也会对自动驾驶的感知系统造成不良影响。
-雪的“沉重感”或密度会影响激光雷达光束的反射效果,产生“幻影障碍(Phantom obstacles)”。这些“幻影障碍”可以抑制自动驾驶车辆正确判断环境的能力,并可能导致车辆误停。
-在多雨或多雾的条件下,会出现类似的不同情况。飞溅的雨水会影响激光雷达的反射效果,雾可能会遮挡摄像机的视线,从而抑制了可靠的感知车辆周围环境的能力。

MIT的研究人员建立的一种大雾天气下基于LiDAR的辅助系统
雷达通常在恶劣天气条件下表现良好。但是,由于雷达无法执行稳健的分类和检测道路标记,自动驾驶不能完全依赖雷达来感知。视觉算法的改进是一条潜在的解决方案。因为人类可以只用眼睛进行感知,就能在雨雪中安全驾驶。模拟生物视觉的算法有可能在恶劣环境中大幅提高自动驾驶的可靠性。与此同时,相机、激光雷达和雷达传感器等多传感器融合的方法也可以用于检测阴天,晴天,雪,雨和黑暗条件下的行人和车辆。目前,这样的系统仍要改进,以提高准确率和稳定性。同时,基于车辆无线数据传输(V2V)和车联网(V2L)的车辆通讯系统可以协助验证传感器数据的准确性。

百度Apollo雨雾挑战
· 在变化和不利的照明条件下的感知
镜头光斑(Lens-flares),大阴影(Large shadows)和其他不利的照明条件也会对感知产生不同的影响。例如,视觉系统可能会将大阴影混淆成其他物体的一部分。此外,可能需要在当前感知系统中添加不同的视觉提示(例如尾灯,反射道路标记等)或热成像(远红外)相机,以提高低光照条件或夜间的性能。即便如此,依然不能保证没有系统未检测和跟踪到的障碍。与此同时,大量远红外线摄像机检测和跟踪算法的计算效率不足以实时使用。
其他感知系统试图通过依赖关于环境的先验信息来解决光条件问题。然而先验信息并非一成不变,如果一个新建的交通指示灯并没有录入先验信息(Priori Information),就会在自动驾驶车辆遇到它时造成麻烦。
还有一些方法可以依赖于有源传感器,例如LiDAR,以克服糟糕照明条件。这种传感器不需要外部光线,因此可以在光线不足和夜间探测障碍物。但是,激光雷达数据在观察复杂或深度纹理的物体(如灌木丛)时通常会产生噪声,从而阻碍系统的感知。因此,为了更好地解决照明条件问题,可以组合来自多个传感器的数据,在不良照明条件下提供不同的优势以获得更好的结果。但在这方面,仍然需要进行广泛的研究来解决剩余的挑战。
· 驾驶员对于自动驾驶系统功能的正确认知
驾驶员对于自动驾驶系统功能的正确认知,是保证自动驾驶系统正确运行的一大重要条件。但是实际上,普罗大众对于自动驾驶分级中每一级别间的差别知之甚少,对于不同厂商的自动驾驶系统的功能也不甚了解。这就造成了,驾驶员可能过分依赖传感器或完全忽略传感器的读数。从而导致恶劣后果。
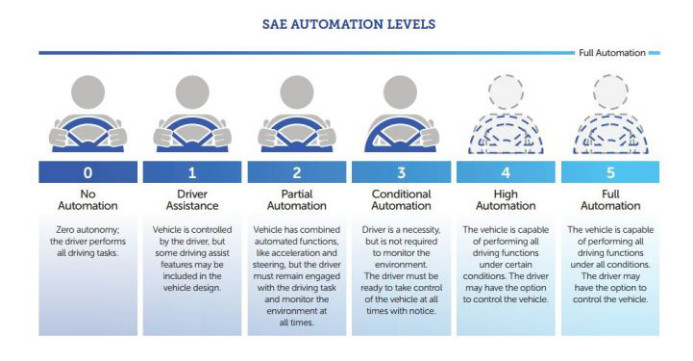
自动驾驶分级
因此,确保公众理解技术的能力(例如,其在典型条件下充分检测障碍物的能力)及其局限性(例如,其无法检测超过一定距离或恶劣天气条件下的障碍物)十分重要。有研究表明,公众可能无法从自动驾驶的中间阶段受益(即Level2和Level3的自动驾驶系统)。因为,在这个等级的自动驾驶系统当中,驾驶员可能不会完全理解该阶段自动驾驶自主特征的范围和限制,从而造成事故的发生。比如,此前发生的一些特斯拉的事故就是驾驶员盲目信任自动驾驶系统而误操作导致的。

特斯拉在国内首起自动驾驶系统致死事故
· 多传感器融合
为了弥补个体缺点,传感器可以通过“多传感器融合”进行耦合。多传感器融合的好处,包括提高感知准确性,可靠性和稳健性。传感器融合也不限于融合来自多个传感器的数据。传感器融合还可以通过融合来自单个传感器的多个读数的数据来执行,以获得更可靠的输出。多传感器融合,通过系统冗余,使系统更加可靠。这称为竞争性融合。人们还可以使用两个互补传感器来增加覆盖范围。例如,在车辆的任一侧使用互补的LiDAR来覆盖车辆前方更宽的角度。
对于自动驾驶商业化来说,多传感器融合可以有效降低成本。多个低精度传感器融合下的精度通常优于使用单个高精度传感器。而单个高精度传感器的成本通常明显高于两个低成本传感器的成本,这些传感器通常可以通过传感器融合实现与单传感器算法类似或更好的结果。尽管如此,在成本限制之内依然需要尽可能使用高精度传感器。
· 传感器故障和运行状态监控
在一辆自动驾驶车辆能够稳健地感知环境之后,他们还需要能够检测和识别传感器感知故障。就像驾驶员看到发动机故障灯会主动停车一样,自动驾驶系统也需要准确检测出传感器故障并采取措施。
在航天航空系统中,通常采用多个相同的传感器以增加冗余度的方法来解决该问题。通过比较验证每个传感器的正确操作,从而确定是否有任何传感器出现故障。然而,单纯增加传感器数量可能会产生负面影响。因此,提出了故障检测与分离(FDI)方法。但实际上,故障检测与分离的方法具有很大的局限性。在该方法中,只要“接近完美”的系统模型才能使该方法有效。但是对于极其复杂的非线性的车辆操纵和不可预测性的周围环境的来说“完美”模型的获得并非易事。
使用分析冗余和非线性变换方法来比较传感器度量,以便检测和识别故障或异常传感器也是一条思路。但这个应用中,误报率很低,漏报率却很高。因此,继续FDI方法的研究是目前的趋势。
三、感知算法
自动驾驶所涉及的感知算法可以分为三类:
· 中介感知(Mediated Perception):在中介感知中,算法通过分析与车辆,行人,树木,道路标记等的距离来开发车辆周围环境的详细地图。这是当今研究中使用的最常见的自动驾驶感知技术。
· 行为反映感知(Behavior Reflex Perception):行为反射感知算法使用人工智能技术将传感器数据(例如车辆环境的图像)直接应用到驾驶操作系统当中。
· 直接感知(direct perception):将以上两种感知方法相结合
除此之外,感知算法也可以分为
· 基于视觉的算法(Vision-based):基于视觉的感知主要依赖于相机数据。因此,这些算法剖析基于像素的视频以检测环境中的车辆,行人和其他障碍物。该算法可以使用几何,光流,颜色或其他图像特征进行检测。

视觉算法示意图
· 基于点云的算法(Point-cloud based):基于点云的感知主要依赖于由有源传感器收集的3D空间中的点(或测量到对象的距离)的数据。算法可以涉及通过点的密度,几何形状或图案从大量点导出结构以便检测物体,正确地检测和识别故障。
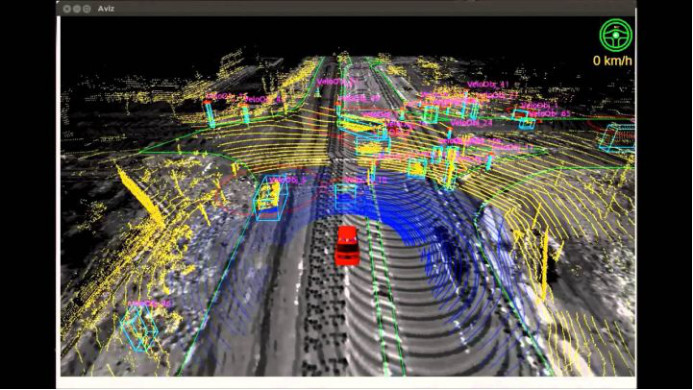
点云算法示意图
四、未来发展方向
以下总结了自动驾驶感知系统传感器相关的领域需要进一步开发的内容:
1. 改善检测并减少不良照明和天气条件下的不确定性;
2. 改善检测并减少复杂环境中的不确定性;
3. 通过交叉验证障碍物位置和信号,减少传感器数据的不确定性;
- 进一步开发传感器融合算法
- 使用更多传感器和传感器融合源构建多层环境建模
- V2V和V2I通信
4.确保驾驶员了解传感器功能和限制;
5.使用更多无源传感器(与有源传感器相比)或开发有效的算法可以抵消增加的密度,从而抵消有源传感器信号的干扰;
6.通过以下方式降低自动驾驶传感器系统的总体成本:
- 使用低成本传感器进一步开发传感器融合算法
- 利用可能的新型低成本,高效传感器
7.开发用于汽车传感器和算法的故障检测和分离系统;
8.使用传感器数据融合,通过使用传感器的互补性和冗余度来限制每个传感器的回收和解决方案的影响,以提高准确性,确定性和可靠性;
进一步提高自动驾驶感知系统的准确度和精度依然是目前的一大发展方向。而多传感器融合技术无疑是其中的重头戏。无论是提高准确度,还是面对极端恶劣天气条件,亦或者实现商业化落地,它都能扮演举足轻重的地位。目前,虽然一些Level2和Level3级别的自动驾驶车辆已经实现了商业化落地,但距离实现完全自动驾驶,我们还有很长的路要走。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
