




 广告
广告





















































纯电动汽车整车控制器软件开发
2019-09-14 19:06:02· 来源:内燃机学报

目前,能源危机、环境污染问题迫在眉睫。纯电动汽车具有无污染、零排放两大优点,因此,研发和推广纯电动汽车技术是有效缓解能源危机和解决环境问题重要途径。而
目前,能源危机、环境污染问题迫在眉睫。纯电动汽车具有无污染、零排放两大优点,因此,研发和推广纯电动汽车技术是有效缓解能源危机和解决环境问题重要途径。而对于动力总成简单的纯电动汽车来说,整车控制器(VCU)的研发十分关键,直接影响车辆的动力性、经济性和安全性。目前,企业对电控系统的开发效率提出更高要求,传统的手写代码开发方式, 由于开发周期较长、调试难度较大,逐渐不适用于现代电控系统的开发。因此,为了开发高性能和高效率的整车控制器,本文根据某纯电动汽车的开发需求,基于“V”模式开发流程,以 Matlab/Simulink 作为开发平台,进行整车控制器软件开发,并进行 HIL 测试和实车验证。
01、整车控制器软件开发
1.1 架构
以某纯电动汽车为研究平台,基于 32 位微处理器 SPC5634 整车控制器(图 1),根据相关通信需求和控制需求,进行控制器软件开发。图 2为整车控制器架构图,主要由输入输出模块、电源电路以及 CAN 通讯模块组成。电源主要是由24V 车载蓄电池提供;输入模块包括档位信号、制动信号、充电信号、加速踏板开度、制动踏板开度,以及电池电压信号等;输出模块是控制继电器,一般由 DCDC、 PTC、 PDU 及水泵继电器等组成;CAN 通讯模块主要作用是根据控制需求,提供整车控制器与电机控制器(MCU)、电池管理系统(BMS)、变速箱控制器(TCU)及三合一控制器(EHBS、DCDC、 EHDS)等进行信息通讯,如图 3 所示为整车网络拓扑结构图。

图1 控制器硬件

图2 整车控制器架构图
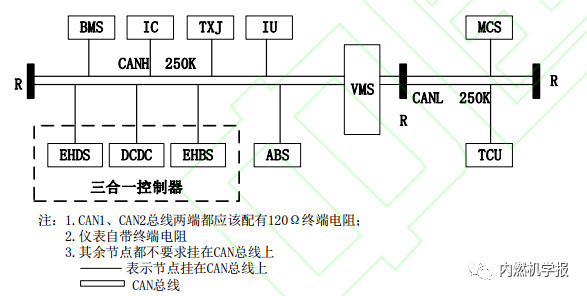
图3 整车网络拓扑结构图
1.2 软件开发
根据整车工况和动力总成状态的不同,将整车控制模式细划分为自检模式、启动模式、起步模式、行驶模式、制动模式、再生模式、停车模式、故障模式、充电模式和下电模式。并且根据各种模式的切换主要如下图 4 所示。
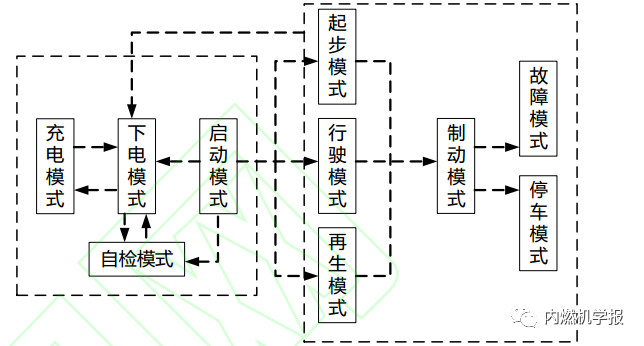 图4 各种模式的切换
图4 各种模式的切换1)自检模式
钥匙信号置 ON 挡,整车处于上电准备阶段,VCU 主接触器闭合,进行自检。自检失败则进入故障模式,反之,进入上电准备。
2)启动模式
钥匙信号从 OFF 挡置于 START 挡之前,确保挡位在P挡,否则无法实现正常上电。钥匙信号置 START 挡,进行自检模式,在没有故障报警的情况下准备上高压。VCU发送使能信号,CAN 总线通讯被唤醒,同时VCU将给MCS、TCU、空调控制系统等设备发送高压上电请求,在保证无故障的条件下,将允许上高压信号反馈给VCU主接触器闭合,完成高压上电,仪表将有Ready信号显示,完成汽车启动。
3)起步模式
车辆在无加速度下进行起步,给定一个期望电机转矩 Start-T 作为可标定目标值,如图 5 所示。当车速 V<V1,为克服静止摩擦阻力,线性增加到目标转矩;当车速 V1>V2,控制电机功率,将车速控制在合理范围,输出电机扭矩时进行滤波处理,实现汽车平稳起步。
4)行驶模式
满足驾驶需求和车辆正常运行,采集加速踏板开度和整车运行状态发送给电机控制器,进行扭矩输出控制,包括恒扭矩和恒功率两种方式。
5)制动模式
制动时, VCU 采集制动踏板开度信号,计算提供相应的制动扭矩,并通过 CAN 总线与电机进行通信。如图 5 所示,根据制动踏板的状态分为滑行再生和制动再生发电两种情况,再生模式主要是控制电机给电池进行充电。
停车模式、故障模式、充电模式及下电模式在此不一一赘述,详细信息请参见资料来源[1]。
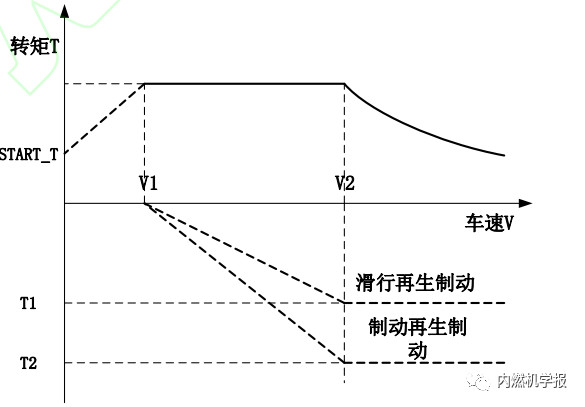
图5 起步模式、再生制动
02、模型搭建及测试
VCU 可以采集 CAN 总线上的电池信息、变速箱状态、电机状态以及相应的驾驶员驾驶需求,设计出符合需求的控制策略,并利用 CAN 网络对总线信息进行管理,满足汽车的正常运行、停止、降功率、制动回馈控制功能的需求和故障检测功能的实现,满足动力性和舒适性的需求,其系统结构原理框图主要如图 6 所示。
图6 系统结构原理图
控制策略主要包含以下模块:输入输出接口模块及控制模块,其中控制模块包含故障处理模块,上下电模块,驱动电机模块,辅件控制模块及限速控制模块,如 7 所示。
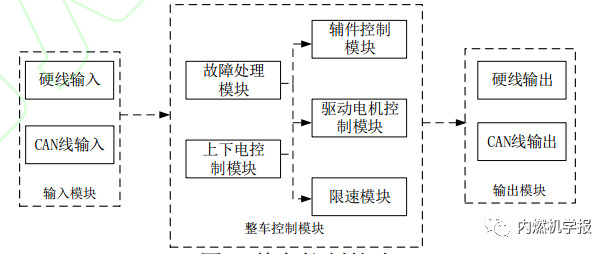
图7 整车控制策略
在 Matlab/Simulink 环境下,建立整车控制策略模型,包括输入输出、控制算法、CAN 通讯以及基于ccp协议底层驱动模块。并利用 Matlab/Simulink 自带RTW工具将整车控制策略模型自动生成C代码,嵌入相关代码集成文件,后将生成的程序下载到整车控制器硬件系统中。并完成模型、软件/处理器、硬件在环测试。
03、实车测试
通过程序刷写软件 INCA 和 value CAN,将生成的 VCU应用程序和底层应用程序加载到控制器,标定相应的加速踏板、制动踏板开度,电机实际转速、转矩与目标转速、转矩,控制模式等信号,如图8所示。
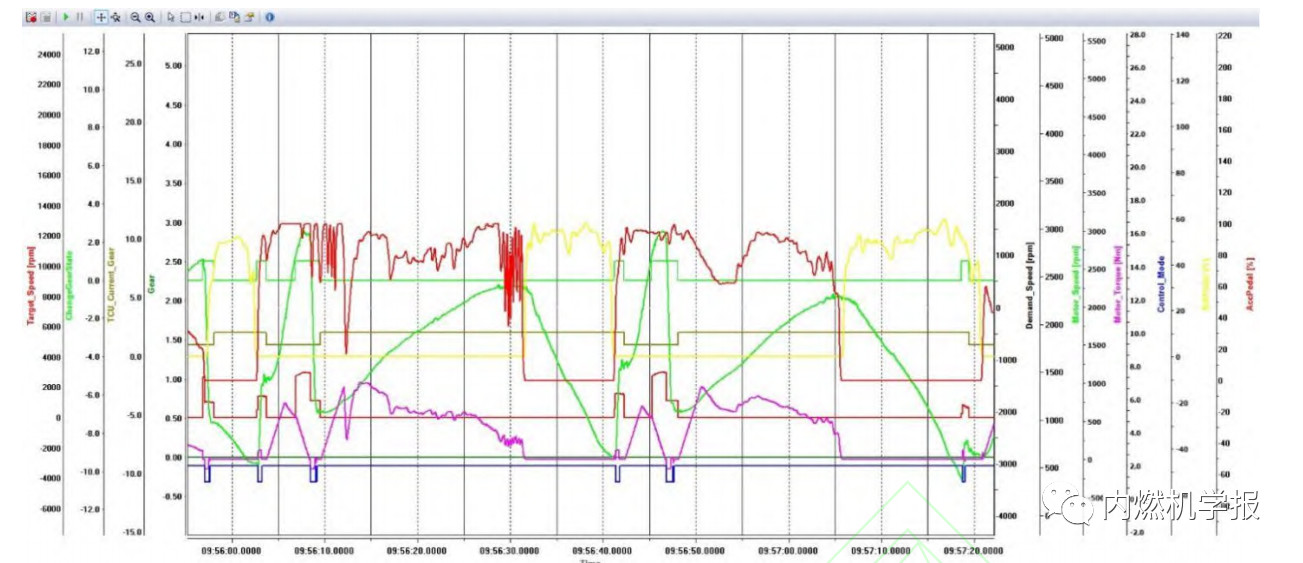
图8 实车测试图
实车运行时,采用 PCAN 软件录取整车报文并分析是否正常运行以及是否存在故障码。关于限速功能的实车测试,通过限制电机转速达到限速功能,当油门踏板开度保持在 100%时,电机转速被控制低于 3500r/min,说明限速功能发挥作用。对于驻坡功能而言,加速踏板开度为 0 时,且车辆行驶在一定坡度上,电机输出小扭矩,确保车辆不会后溜,如图9和10所示。
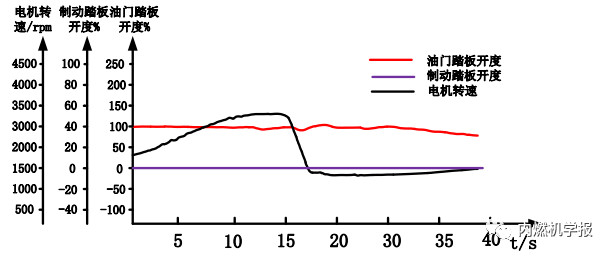
图9 限速功能测试图
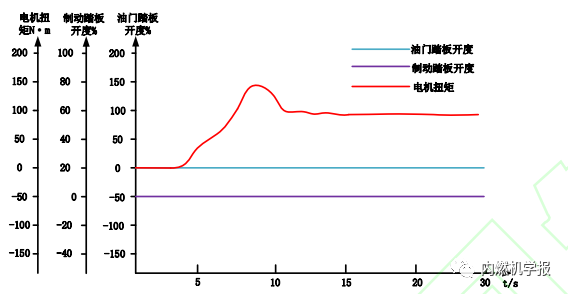
图10 驻坡功能测试图
资料来源及推荐阅读
[1]邓涛,邓彪,宋刚.基于SPC5634的纯电动汽车整车控制器软件开发与实验[J/OL].重庆理工大学学报(自然科学):1-7[2019-05-06].
[2] 陈春明, 夏超英. 基于 XC2268N 的纯电动汽车整车控制器设计[J]. 电源学报, 2017, 15(2): 101-108.







最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
