




 广告
广告





















































如何对自动驾驶技术进行全面检验?
2019-05-07 22:58:32· 来源:智车科技 作者:张良

自动驾驶汽车在进行规模化商用之前,必须进行充分的功能安全和性能安全测试验证,以确保消费者和公众的安全。测试内容包括传感器、算法、执行器、人机界面等,从
自动驾驶汽车在进行规模化商用之前,必须进行充分的功能安全和性能安全测试验证,以确保消费者和公众的安全。测试内容包括传感器、算法、执行器、人机界面等,从应用功能、性能、稳定性和鲁棒性、功能安全、预期功能安全、型式认证等各个方面确保车辆能够自主上路。整个开发测试过程要经历软件在环(SiL)、硬件在环(HiL)、车辆在环(ViL)、封闭测试场测试、开放道路测试五大步骤。

软件在环(SiL)仿真相当于将编译的生产源代码集成到数学模型仿真中,提供一个实用的虚拟仿真环境来对大型复杂系统进行详细控制策略开发和测试。SiL可以快速验证模型的策略算法和功能逻辑,能够尽早发现系统缺陷和故障,极大降低了后期故障排查的成本。
目前,市面上针对自动驾驶的仿真测试软件有很多,比如基于Unity或虚幻引擎的AirSim、CARLA Simulator,能够对车辆控制以及传感器进行仿真;基于机器人仿真软件的Gazebo、Morse,有比较好的动力模型和各种传感器的仿真;基于汽车动力学仿真软件的SCANeR、PreScan、Panosim等,能够对物理和汽车动力学模型进行仿真等。通过构建车辆和交通环境模型,测试车辆的工况、传感器、算法等。
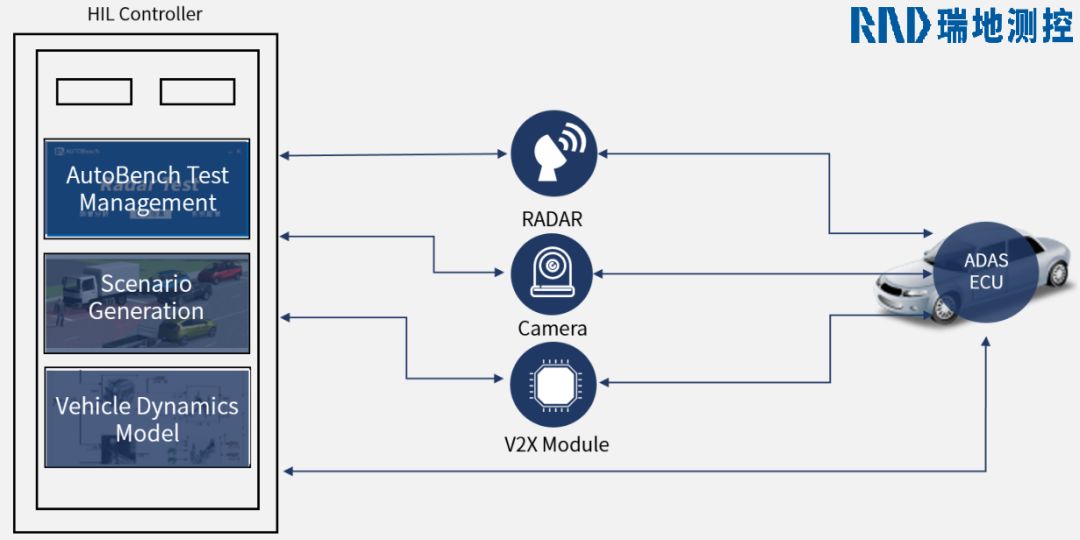
随着显卡图像技术的进步,仿真环境越来越接近真实,但纯虚拟环境还远不能穷尽所有可能的场景,这就需要硬件在环(Hil)。Hil依靠电子控制器与真实传感器连接,有真实数据的加入,让仿真测试系统更进一步。该测试重点在于模拟外部接口信号和虚拟车辆工况的变化,能够最大化的模拟“虚拟车辆”并实时运行整车模型,并通过接口板卡连接 VCU 控制器,模拟 VCU 在不同工况下的工作环境,实现 VCU 控制算法验证和故障诊断测试。硬件在环仿真平台通常被用来验证无人驾驶车辆环境感知,路径规划以及运动控制等重要模块的算法有效性,同时也用来验证各类接口的正确性。
一般情况下,传感器供应商在出厂前也会进行测试,比如摄像头会对视野、覆盖、探测距离进行测试;雷达需要检测天线图、分辨率以及随天气变化的衰减情况;激光雷达会检测扫描层和噪音表现。而当传感器被安装到车辆上时,需要与其负责的功能一起被检验。比如要检验摄像头LKA系统的HiL项目,需要大量的、不同车道状态组合的工况下进行测试。道路测试很难遍历不同的车道组合,比如不同转弯半径的车道,难以在真实道路上都找得到,所以选择能够轻易定制测试工况的HiL变得很关键。
硬件层面上的检查之后,自动驾驶汽车还需要进行车辆在环(ViL)测试,将自动驾驶系统集成到真实车辆中,并在实验室条件下构建模拟道路、交通场景以及环境因素,从而构成完整测试平台的方法,可实现自动驾驶功能验证、预期功能安全性测试验证、各种风险场景测试、与整车相关电控系统的匹配及集成测试。
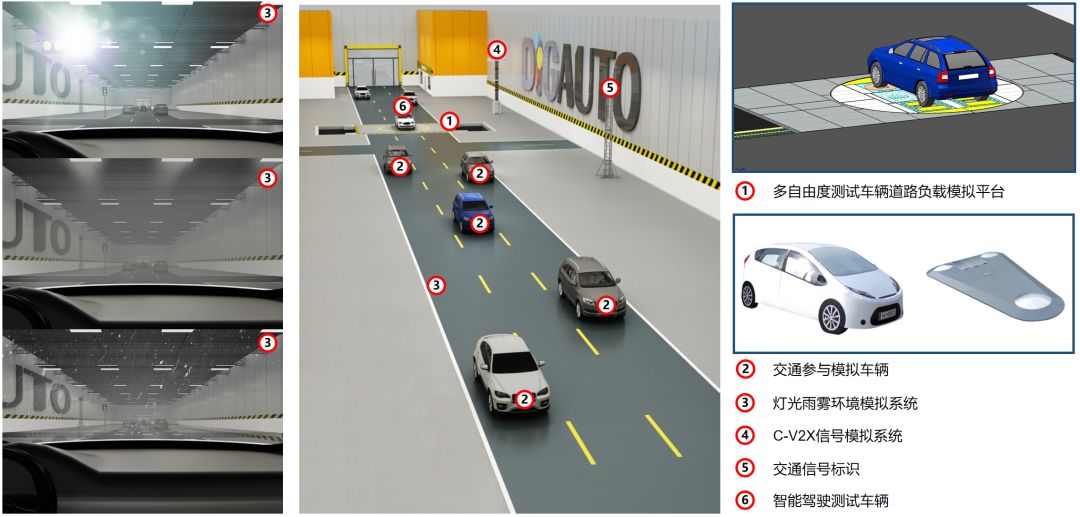
实车在环实现效果图
车辆在环测试的关键是要保证车辆运行的状态与实际道路行驶近似,通过实验室搭建一个完整的模拟交通测试环境,包括道路设施、交通车辆、行人、自然环境等。将真实车辆置身于模拟测试环境中完成不同的驾驶任务,实现多种多样的交通车辆配置及复杂的局部交通场景。
通常在虚拟环境下,可以覆盖更多案例场景的参数空间,确定临界工况,寻找危险工况点,同时获得刻画自动驾驶系统应对临界场景能力的有效模型。但是,目前交通模型与驾驶员模型的仿真精度、车辆系统模型的仿真置信度都存在技术挑战,需要进行实车测试,来比较仿真与真实测试中的行为,测试验证指定场景的系统表现,还有面对自动驾驶汽车时的行为反应模式。这就需要封闭场地测试和公共道路测试。
去年,交通运输部出台了关于《自动驾驶封闭场地建设技术指南(暂行)》的通知,对封闭场地测试有明确的标准,同时规范了自动驾驶封闭测试场地建设要求,并指导各地各单位开展自动驾驶封闭场地建设,让测试车辆在更接近国内真实交通规则和环境下行驶,除了一些必要的典型场景外,一些测试场还设有边缘场景、极端场景,更全面的检测车辆的性能。在统一的、被广泛认可的综合测试评价之后,车辆就可以慢慢驶向半开放道路和开放道路。
这就是目前自动驾驶汽车在系统测试环节的基本步骤,然而各个测试阶段是如何衔接的?如何实现虚拟测试与实车测试融合?如何规定各个阶段的测试边界?如何建立测试场景库与评价准则?如何根据设计运行范围设定场景与参数空间……一系列问题还需要进一步完善。







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
