




 广告
广告





















































Voyage自动驾驶测试场景开源文档介绍
2019-09-14 18:28:18· 来源:自动驾驶测试验证

自动驾驶测试场景构建目前尚无统一标准,Voyage开源了他们自动驾驶测试的部分场景,花时间把相关的测试场景文档进行了阅读,下面把阅读的笔记进行分享,希望能给
自动驾驶测试场景构建目前尚无统一标准,Voyage开源了他们自动驾驶测试的部分场景,花时间把相关的测试场景文档进行了阅读,下面把阅读的笔记进行分享,希望能给从事自动驾驶测试相关工作的人有所帮助,共同促进行业发展。
一、场景测试
文档给出了自动驾驶车辆在公共道路或者封闭道路上可能遇到的各种场景,为了满足最高的安全要求,每一种场景都详细的定义了车辆在每种场景下的行为规范。自动驾驶汽车设置为Ego,把场景分割成行为模块,这些模块列举了一些安全边界场景的测试,确保自动驾驶车辆的安全。
1.1、OAS Scenarios (场景组成)
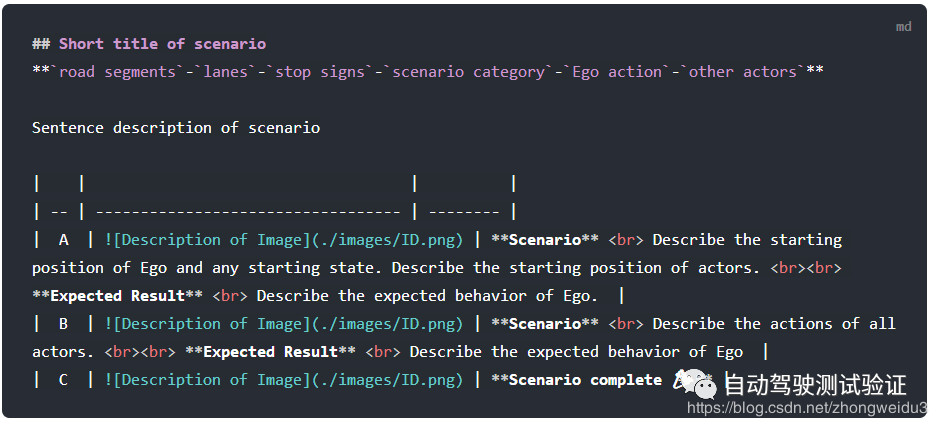
场景可以被分成一步或者多个步骤,每一个步骤都有图片、场景描述和预期结果。
图片:表明了场景的最初状态,自车和其他车辆或者障碍物在状态空间中位置和状态、障碍车辆和障碍物下一步的状态。
场景描述:描述了在这一个步骤的障碍物的行为。
期望结果:自车的期望行为、如果自车的期望行为不能够实现则认为场景测试失败。
1.2、Scnearios IDs(场景命名方式)
每个场景都被分配特定的ID
road segments-lanes-stop signs-scenario category-Ego action-other actors
道路片段数-车道数量-停止标志-场景分类-主车行为-其他交通参与者
道路片段数:道路的片段数量( 2-way 2, 3-way 3, 4-way 4, n/a XX, etc)
车道数量:车道的总数量和是否有中央隔离带或者安全岛( 1, 2, 3, 4, 2 lanes + median 2M, 4 lanes + median 4M, 1 lane + island in center 1I etc)
停止标志:基于场景的鸟瞰图的停止标志位置( North N, East E, South S, West W, none XX, etc)
场景分类:( Car following CF, crosswalks CW, cul-de-sacs CDS, intersections I, pedestrians in road PIR, reversing vehicles RV, speed limits SL, vehicles in roadway VR, etc)包括跟随行驶、通过人行横道线、死路、十字路口、道路行人、倒车、车辆在路循线。
主车行为:直行、左转、右转、掉头( Straight STR, left L, right R, u-turn U, etc)
其他交通参与者:交通参与者的开始结束位置、交通参与者的行为动作( actor:start>end:action)如果有多个交通参与者,那么这些交通参与者的顺序按照与主车发生关系的顺序进行排序。
交通参与者( car CAR, bus BUS, bicycle BIKE, motorcycle M, golf cart GC, pedestrian PED, none XX, etc )
开始结束位置( North N, East E, South S, West W, static in lane St, double parked DP, parked on roadside Pa, driveway Dr, etc )
动作(主要是指障碍物的非常规动作)
1.3、Parameterization 参数设置
通过对一个场景关键参数值得变化可以生成综合的测试用例集。
1.4、Behavioral Compencies 行为决策能力
OAS的测试场景的参考了NHTSA(National Highway Traffic Safety Administration)规定了跟车、限速响应、路口让行等多种能力;还参考了Waymo的安全报告。
跟车场景(Car Following)
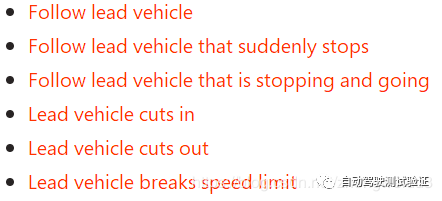
常规跟车、跟车时前车急停、跟车时前车停止起步、前车切入、前车切出、前车超出限速。
把一个场景按照不同的状态分成不同的图片和场景状态
人行横道线(Crosswalks)
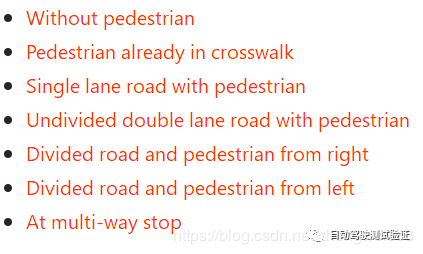
主车直行通过人行横道线、主车直行行人通过人行横道线、单车道主车直行行人通过人行横道线、未分离双车道主车直行行人通过人行横道线、分离双车道主车直行右侧行人通过人行横道线、分离双车道主车直行左侧行人通过人行横道线(分行人初始位于中间和位于路边,也分停止不停止)、路口人行横道线通行。
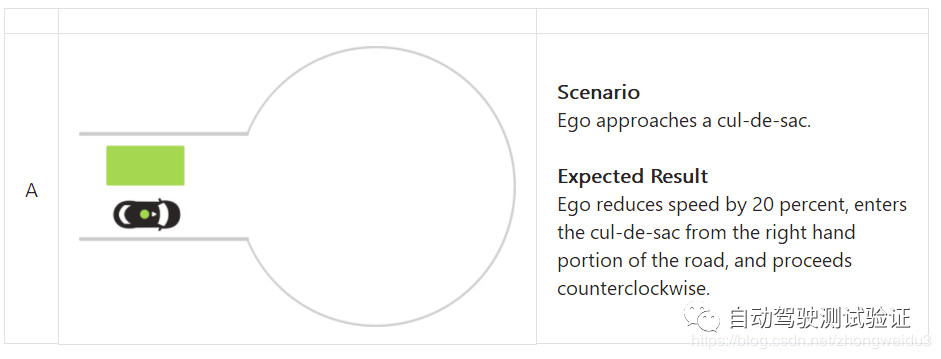
死路(Cul-de-sac)
死路、安全岛、死路中间有障碍物
路口(Intersections)
包括十字路口和丁字路口,包括有没有障碍车辆。 丁字路口可以认为是 Way uncontrolled intersection
车辆在路(Vehicles in Roadway)
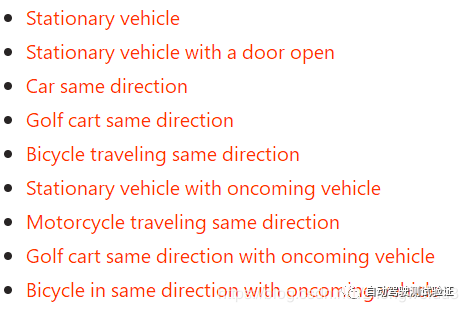
静态车辆
(主车直行同车道右前方车辆静止、主车直行同车道右前方车辆静止开门、主车直行同车道正前方车辆静止)
静态小车障碍物
(主车直行同车道右前方高尔夫球车、自行车、电动自行车同向行驶)
对向来车
(两个相反方向车道,主车直行同车道右前方车辆静止对向车道车辆低速行驶(要求合理判断换道时机);主车直行通车到右前方高尔夫球车静止对向车道车辆低速行驶、主车直行通车到自行车低速行驶对向车道车辆低速行驶)
行人不遵守交规(Jaywalking pedestrian)
非分离道路行人横穿( Ego approaches jaywalking pedestrian on undivided road)
分离道路行人横穿(Jaywalking pedestrian on divided road)
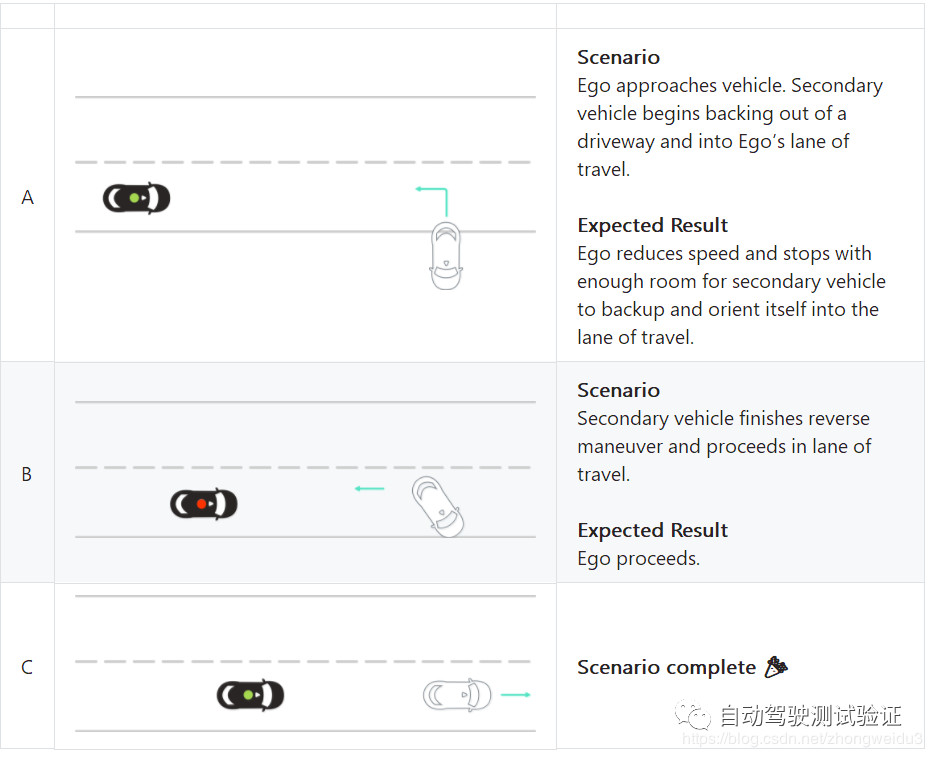
障碍车辆逆行(Reversing Vehicles)
车辆逆行(此处的场景是短暂倒车进直路然后行驶)
限速工况(Speed Limits)
限速标志牌、解除限速标志牌、一个限速向另一个限速转变
场景描述模板(Scenario Template)
二、功能安全(Functional Safety)
OAS(Open Autonomous Safety)模型需要满足ISO26262标准,因为没有司机确认和减轻故障,自动驾驶系统需要有很强的鲁棒性、需要进行严格定义的风险分析和评估认证。
包括安全需求流程和功能需求流程
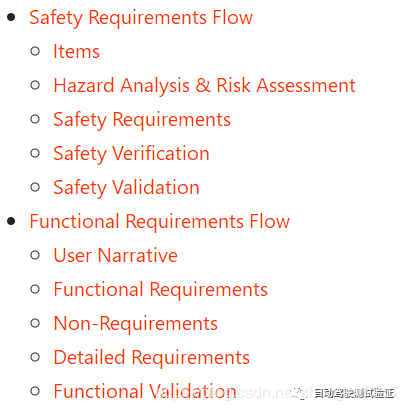
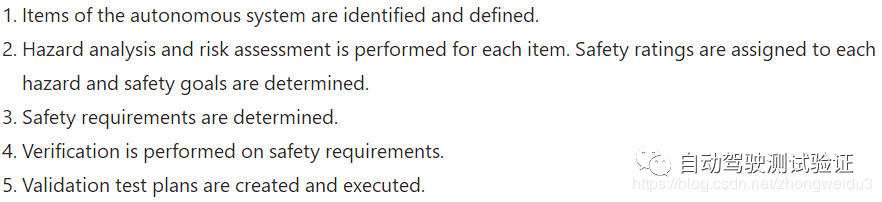
安全需求流程(Safety Requirements Flow)
1、自动驾驶系统组件的识别和定义。确认自动驾驶系统每一个模块的组件。
2、对每一个组件进行失效分析和风险评估,确认安全等级和安全目标。( Hazard Analysis & Risk Assessment (HARA),ASIL)根据ASIL确认安全风险等级,包括风险的可控制性、暴露性、严重性。
3、确认安全需求。
4、安全需求测试执行。(代码静态审查、单元测试等)
5、认证测试计划和执行。
功能需求流程(Functional Requirements Flow)
功能需求的目标就是确定车辆在不同的变化场景中应该怎样表现:
1、用户需求详细描述。
2、确认功能范围,根据环境需求和操作设计域进行不同的配置。
3、对功能需求进行细颗粒度的划分,便于对每项功能进行测试。随着功能需求的细颗粒化,功能测试的需求也会越来越明确。
三、自动评估(Autonomy Assessment)
主要是统计平均次接管的英里数和每次脱离自动驾驶功能的英里数。主要的脱离分为下面几类。
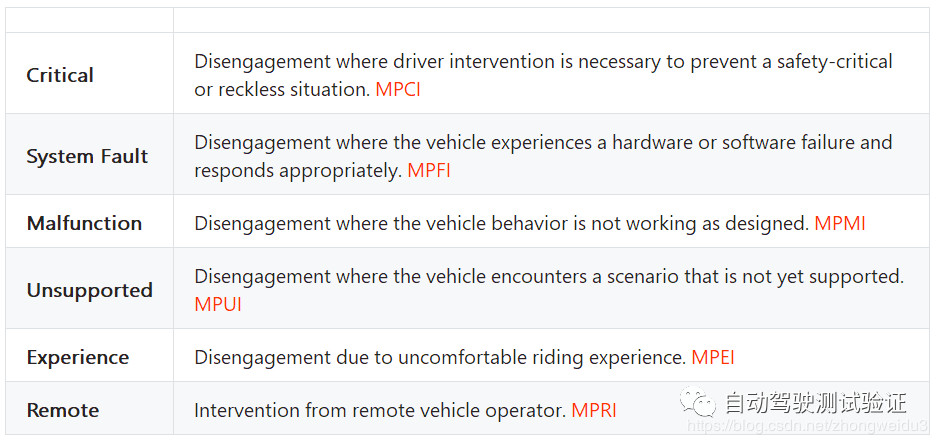
人工介入原因分类(Classifying Interventions)
临界性原因:为了防止发生可能的安全事故而接管,统计指标 MPCI
系统故障:系统发生软件或者硬件故障,统计指标MPFI
车辆行为异常:车辆表现出不符合设计的行为,统计指标MPMI
超出设计作用域:车辆遇到了设计中不能处理的场景,统计指标MPUI
远程遥控接管:远程遥控车辆接管,统计指标MPRI
在日常的运营过程中,会记录每一次的脱离时间,和相应的脱离时的车辆数据和环境数据记录。
记录的数据会存储在车辆本地,然后在晚上进行同步上传到服务器,在云端进行数据的处理、评估和存档。
每次脱离自动驾驶时候的数据会在仿真平台上进行场景重构,在重构的仿真环境中进行测试,重现场景观察车辆表现。







最新资讯
-
奇石乐推出用于DAQ数据采集系统的KiStudio
2025-04-28 17:51
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
