




 广告
广告





















































基于仿真的GLOSA技术研究现状及展望
2019-06-22 23:31:27· 来源:自动驾驶与车路协同研发测试技术

吴超/文基于仿真的GLOSA技术研究现状及展望01概念架构绿波车速引导(Green Light Optimal Speed Advisory, GLOSA)系统可以在交通岔路口依据信号灯当前和未来的
吴超/文
基于仿真的GLOSA技术研究现状及展望

01 概念架构
绿波车速引导(Green Light Optimal Speed Advisory, GLOSA)系统可以在交通岔路口依据信号灯当前和未来的状态,为行驶的车辆提供最优化的速度建议,从而避免车辆因为以不合理的车速前行而导致不必要的停车等待,提高通行效率,同时降低CO2排放,保护环境。
GLOSA系统会在交叉路口处向靠近的车辆广播交通信号灯状态信息,该信息通常包含位置数据MAP、信号灯相位数据以及信号灯相位计时数据SPAT。
随后,GLOSA系统将上述消息中的数据输入到算法模型中,计算并输出最佳的速度建议。

图1 GLOSA系统提供速度建议
02
研究现状
当前,学术界与工业界均将GLOSA系统作为智能交通系统(Intelligent Transport System, ITS)作为一种基本的应用模式,并开展了大量的学术研究与工业实现,涉及计算机科学、土木工程以及交通运输等不同领域。现在,仿真实验被广泛应用于GLOSA算法及架构的验证工作。
Tielert[1]等研究人员通过应用一系列不通的仿真框架,证明了GLOSA系统对自然环境和交通效率方面的积极效果。仿真框架包括微观交通模型以及基于IEEE 802.11p的理想通信模型和模糊通信模型。
该通信仿真实验结果显示,对于单一车辆靠近的场景,GLOSA系统可以降低22%的燃油消耗量,而对于多车路网场景,可以减少约8%的燃油消耗。
与此同时,该仿真实验还指出信息距离(车辆第一次接收到GLOSA广播信号的时与交通信号灯之间的距离)会对GLOSA系统的燃油经济性造成影响:当信息距离超过500至600米时,GLOSA系统对燃油消耗的优化效果变得微乎其微。

图2 Tielert研究中的交通模型
Katsaros[2]等研究人员同样基于IEEE 802.11p通信协议建立GLOSA仿真平台。该仿真平台将交通信号灯信息整合到了合作式关注消息(Cooperative Awareness Messages, CAMs)中。
研究结果显示,GLOSA系统可以减少平均燃油消耗量约7%。与此同时,该研究表明最优的GLOSA系统激活距离为300米,即在距离交通信号灯300米时,GLOSA系统开始计算建议车速将得到最佳的效用。

图3 Katsaros研究中的场景模型
除燃油经济性以外,不停车通过信号灯路口同样是GLOSA系统的核心目标。为此,Krajzewicz[3]等学者通过仿真实验,研究了GLOSA系统通信距离(非信息距离或系统激活距离)与不停车通行可靠性之间的关联。在既定仿真参数的条件下,需要保证1000米以上的有效通信距离才可以保证较高的不停车通行可靠性。

图4 Krajzewicz研究中的交通场景
Staubach[4]等人研究了在不同交通环境下的GLOSA系统性能。研究将相同的GLOSA系统模型分别应用于城市和乡村道路场景,仿真结果显示,在城市场景中,GLOSA系统降低了15.9%的燃油消耗量,而在乡村场景中,GLOSA系统降低了18.4%的燃油消耗量。除此之外,GLOSA系统分别在400米(乡村交通场景)和300米(城市交通场景)下可以得到最佳的效果。
Eckhoff[5]等人研究了车辆密度对GLOSA系统在燃油经济性方面的影响。仿真实验结果显示,在低密度场景下,GLOSA能够降低约11.5%的CO2排放,而在高密度交通场景下,GLOSA系统在减少CO2排放方面的效果大幅下降。
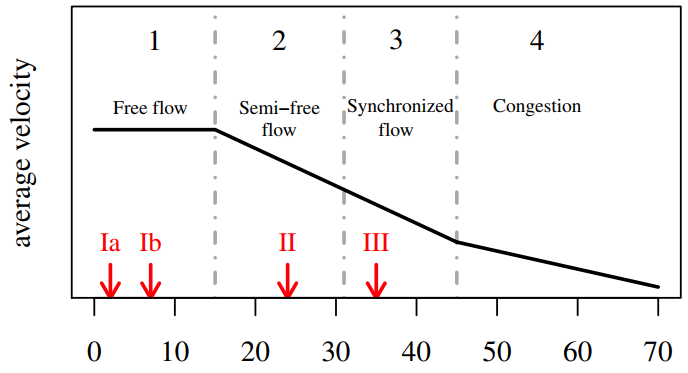
图5 车辆密度对行车速度的影响(辆/KM)
Xia[6]等人利用仿真工具研究了一种增强的GLOSA应用(EcoApproach and Departure,EAD)。除了使用GLOSA系统中的SPAT信息外,EAD还将前装车辆纳入优化算法中,这样可以提高建议速度的效果。
除此之外,EAD还可以很好地帮助编队行驶的车辆(Platooning)高效地通过信号灯交叉路口。研究还指出,如果GLOSA系统中的通信距离和路口交通信号灯之间的距离相等,则可以得到最佳的燃油经济性。
最后,仿真实验结果还显示,通信延迟对燃油经济性的影响具有一定的上限,该上限为2秒。低于2秒的通信延迟不会对燃油经济性造成明显的积极影响。
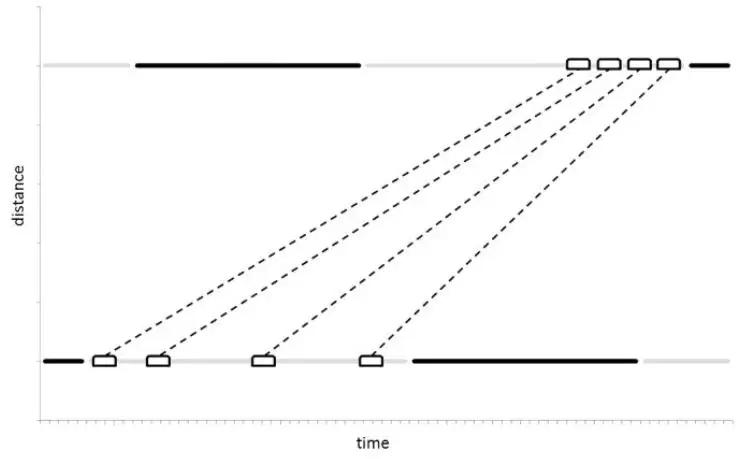
图6 EAD中时间与距离之间的匹配关系
03
研究展望
在未来的研究方向中,GLOSA系统性能优化需要结合到智能网联汽车(Intelligent Connected Vehicle, ICV)及ITS的发展成果中。
例如,ad-hoc自组网络与4G/5G蜂窝网络的结合,将会提升GLOSA系统的性能,但是异构的网络架构必然给系统集成和算法优化带来新的挑战。
此外,GLOSA算法与应用研究应当采用场地与仿真结合的模式,提高GLOSA系统优化性能的可靠性与实用性。

04
参考文献
[1] T. Tielert, M. Killat, H. Hartenstein, R. Luz, S. Hausberger, T. Benz, The impact of traffic-light-to-vehicle communication on fuel consumption and emissions, 2010 Internet of Things (IOT), Tokyo, Japan,(2010),pp.1–8, http://dx.doi.org/10.1109/IOT.2010.5678454.
[2] K. Katsaros, R. Kernchen, M. Dianati, D. Rieck, Performance study of a Green Light Optimized Speed Advisory (GLOSA) application using an integrated cooperative ITS simulation platform, 2011 7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, (2011),pp.918–923, http://dx.doi.org/10.1109/IWCMC.2011.5982524.
[3] D. Krajzewicz, L. Bieker, J. Erdmann, Preparing simulative evaluation of the GLOSA application, 19th ITS World Congress, Vienna, Austria, (2012).
[4] M. Staubach, N. Schebitz, F. Köster, D. Kuck, evaluation of an eco-driving support system, Transp. Res.PartF27,PartA(2014)11–21, http://dx.doi.org/10.1016/j.trf.2014.09.006.
[5] D. Eckhoff, B. Halmos, R. German, Potentials and limitations of Green Light Optimal Speed Advisory systems,2013IEEE Vehicular Networking Conference, Boston,MA,USA,(2013),pp.103–110, http://dx.doi.org/10.1109/VNC.2013.6737596.
[6]H.Xia,G.Wu,K.Boriboonsomsin,M.J.Barth, Development and evaluation of an enhanced eco-approach traffic signal application for connected vehicles,16thInternational IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, (2013), pp. 296–301, http://dx.doi.org/10.1109/ITSC.2013.6728248.
- 下一篇:广汽获广州首批智能网联汽车路测牌照
- 上一篇:目前国六标准全车型名单







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
