




 广告
广告





















































整车碰撞中常用的铰链
2019-07-01 22:30:51· 来源:汽车碰撞安全仿真在线

整车建模中不但要涉及网格的划分,还要涉及到各种连接、运动和其他功能部件的简化。本文针对整车CAE模型搭建中主要涉及到的连接、运动和其他功能部件的简化进行
整车建模中不但要涉及网格的划分,还要涉及到各种连接、运动和其他功能部件的简化。本文针对整车CAE模型搭建中主要涉及到的连接、运动和其他功能部件的简化进行简要描述。
运动铰
一个运动铰可连接两个体并约束其相对运动,如,滑移铰只允许物体间的相对滑动。
运动铰对连接体的约束作用所产生的载荷称为约束载荷。约束载荷分别作用于连接体上,大小相等,方向相反,并对连接体的相对运动进行限制,使其相对运动与铰链施加的约束相一致。
相对静止件的连接
不同部件的连接简化建模一般分为以下三类:
1、可变性体(柔性体)之间的连接;
2、可变形体与刚性体的连接;
3、刚性体之间的连接。
常用的铰链
球铰(Spherical Joint)
转动铰(Revolute Joint)
滑移铰(Translational Joint)
圆柱铰(Cylindrical Joint)
万向铰(Universal Joint)
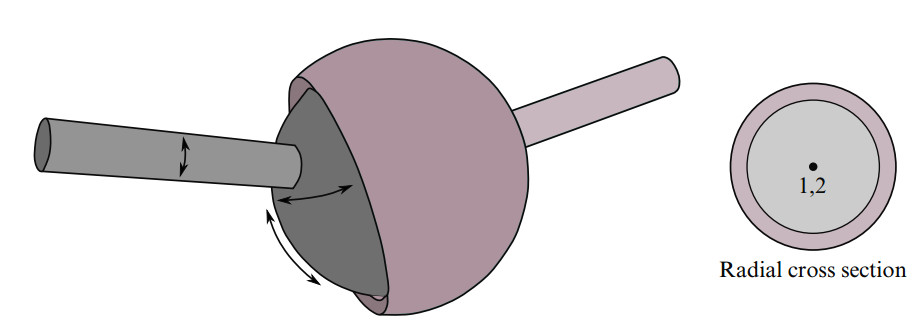
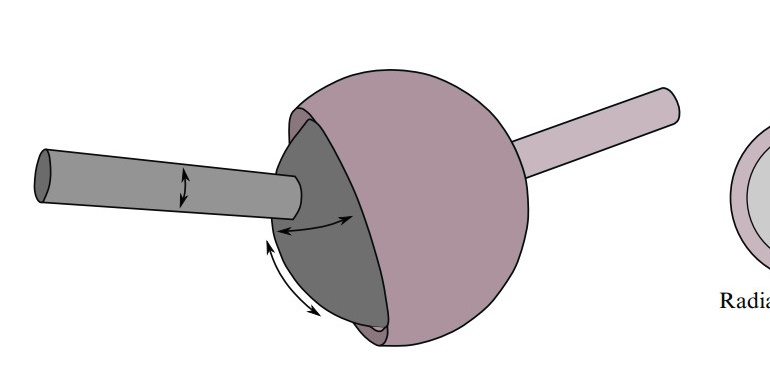
01 球铰(Spherical Joint)
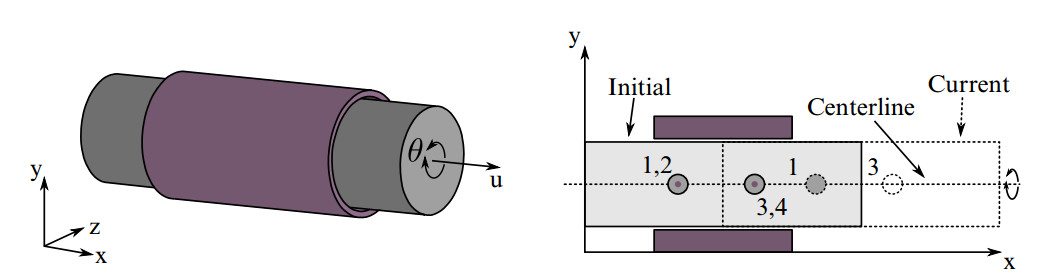
球铰约束连接体的相对运动只绕着铰坐标原点的运动,节点1和节点2重合但不等效。
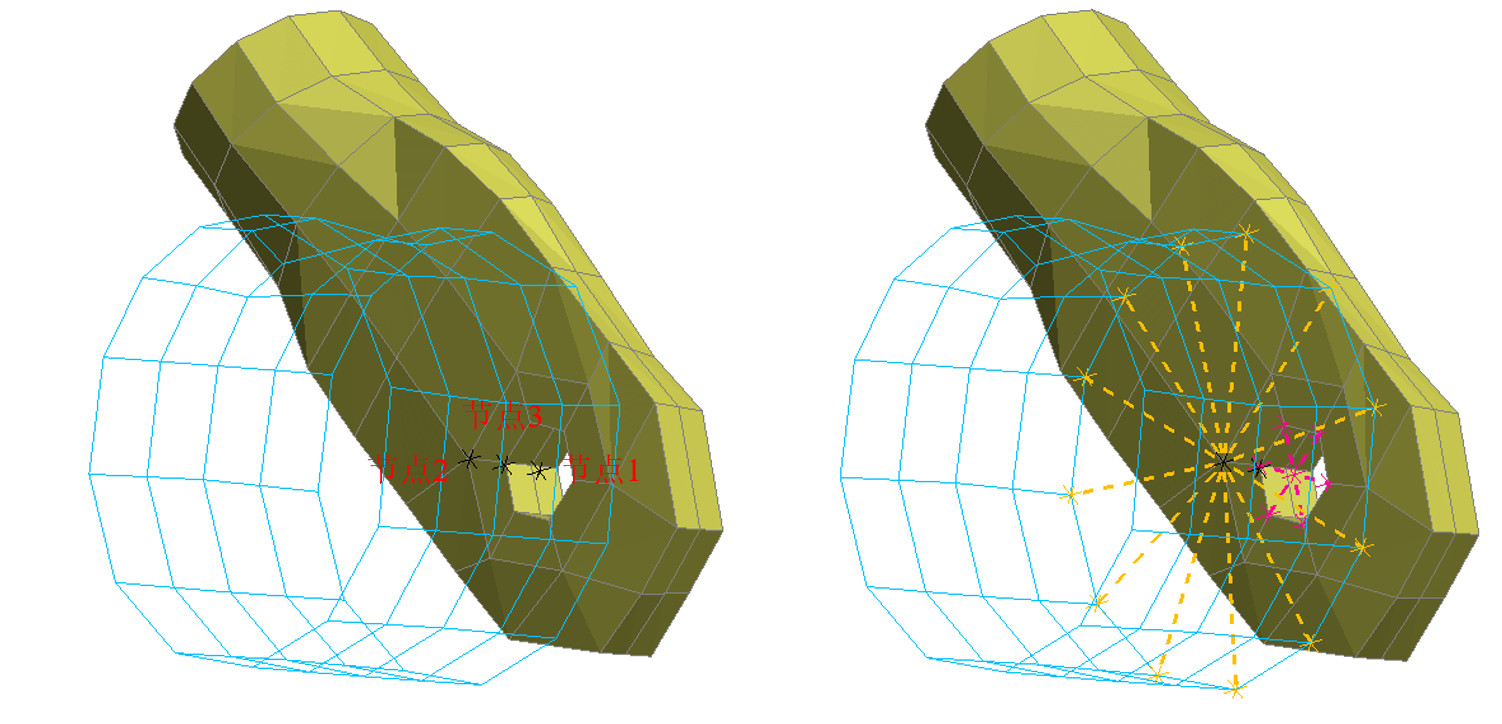
有限元建模
在两Part上分别创建节点1、2,如下图所示,并将节点1和节点2分别绑定到两个部件上,节点3为节点1和2的中点。
点击Primer中的CONSTR下拉菜单,选择JOINT,进入如下图所示创建铰链的界面,界面中的N1、N2分别对应上图的节点1和节点2,节点选择完毕后,点击Creat JOINT创建转动铰,此时会弹出创建铰链错误信息,点击CONTINUE,即可完成转动铰的创建。
Primer提示错误信息如下图所示:
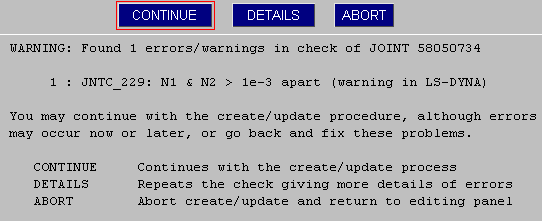
错误信息提示:节点1和节点2未重合。
通过将节点1和节点2平移到节点3位置,可以解决错误信息。如何移动节点见下文。
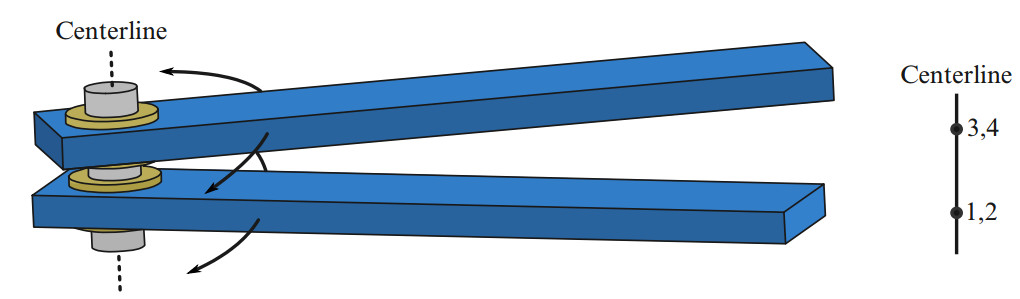
02 转动铰(Revolute Joint)
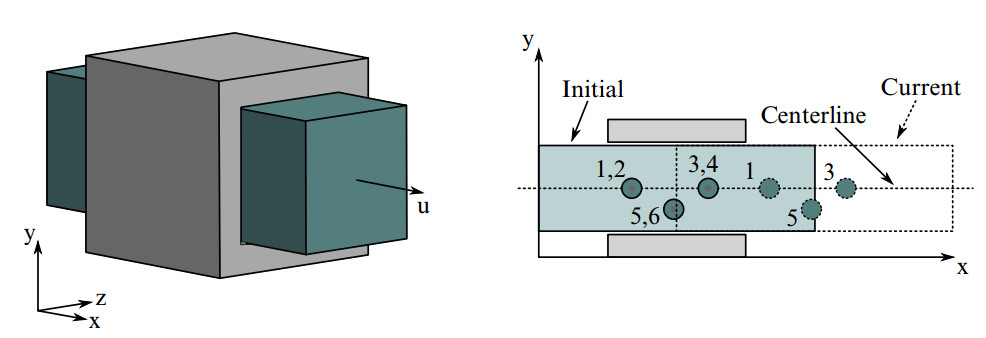
节点1和节点2重合,节点3和节点4重合。节点1和节点3位于刚体A上,节点2和节点4位于刚体B上。两个刚体绕由两对重合的节点构成的轴进行旋转。此轴为中心线。
有限元建模
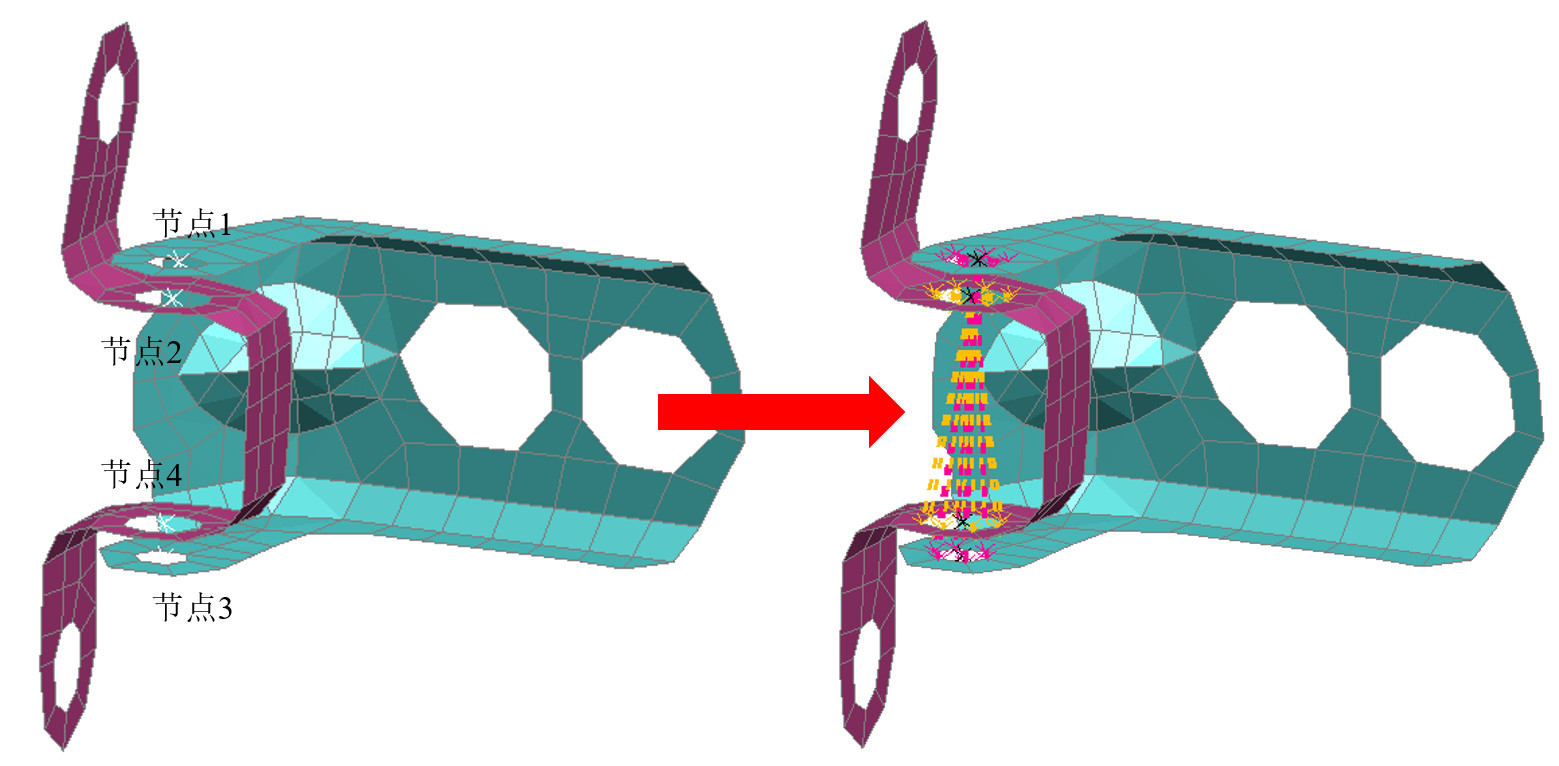
在两Part上分别创建节点1、2、3、4,如下图所示,节点1、3在同一个Part(青色),节点2、4同一个Part(紫色)。
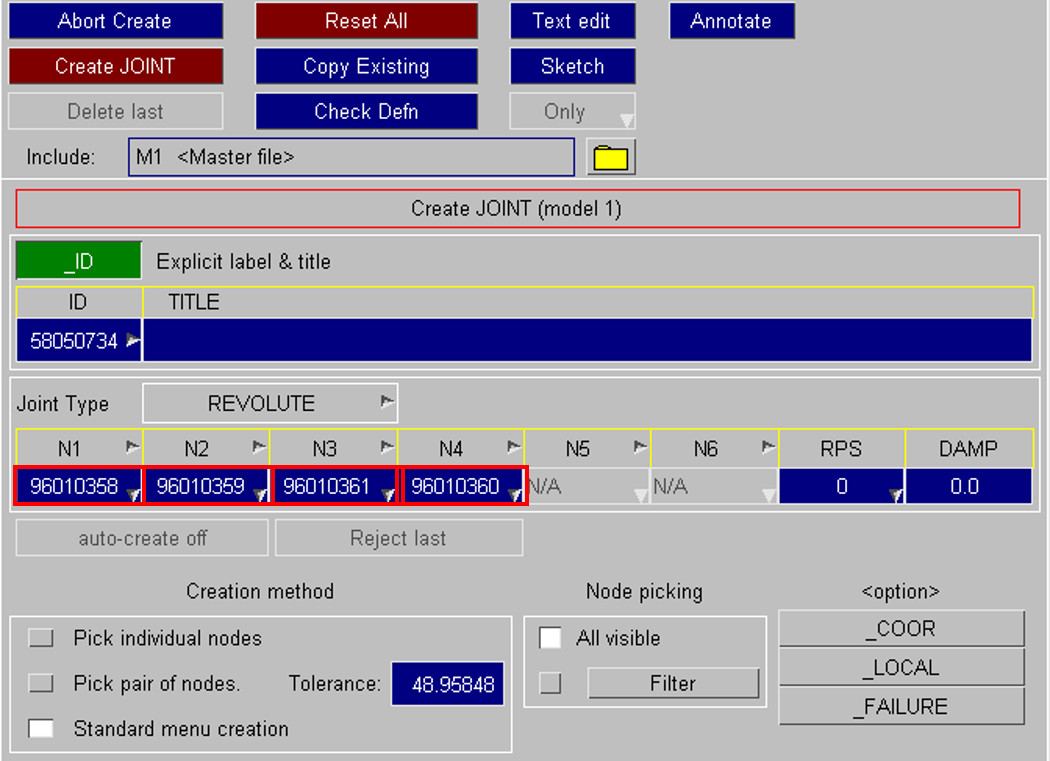
点击Primer中的CONSTR下拉菜单,选择JOINT,进入如下图所示创建铰链的界面,界面中的N1、N2、N3、N4分别对应上图的节点1、2、3、4,节点选择完毕后,点击Creat JOINT创建转动铰,此时会弹出创建铰链错误信息,点击CONTINUE,即可完成转动铰的创建。
Primer提示错误信息如下图所示:
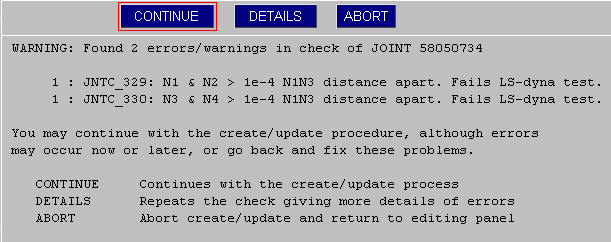
错误信息提示:节点1和节点2、节点3和节点4未重合。
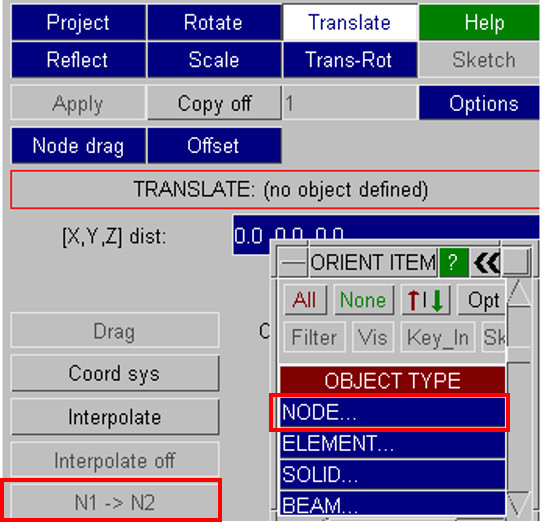
在Primer通过工具Orient将节点1和节点2进行重合。点击对话框中的NODE,选择节点2(表示将节点2进行移动),再点击N1-N2(表示节点2从N1位置移动到N2位置);对节点1和节点2进行重合设置:先选择节点2,再选择节点1,点击Apply将节点2移到节点1位置,如果将该节点移动到正确位置,点击Accept。
节点4和节点3重合操作和上述方法类似,在此不再讲解。
03 圆柱铰(Cylindrical Joint)
圆柱铰从旋转铰衍生而来,可约束连接体的相对运动只绕中心线转动和滑动。
有限元建模
圆柱铰的建模方法和转动铰的建模方法类似。
04 滑移铰(Translational Joint)
滑移铰可约束连接体之间的相对运动只沿中心线相对滑动,其只有一个自由度。
有限元建模
圆柱铰的建模方法和转动铰的建模方法类似。
05 万向铰(Universal Joint)
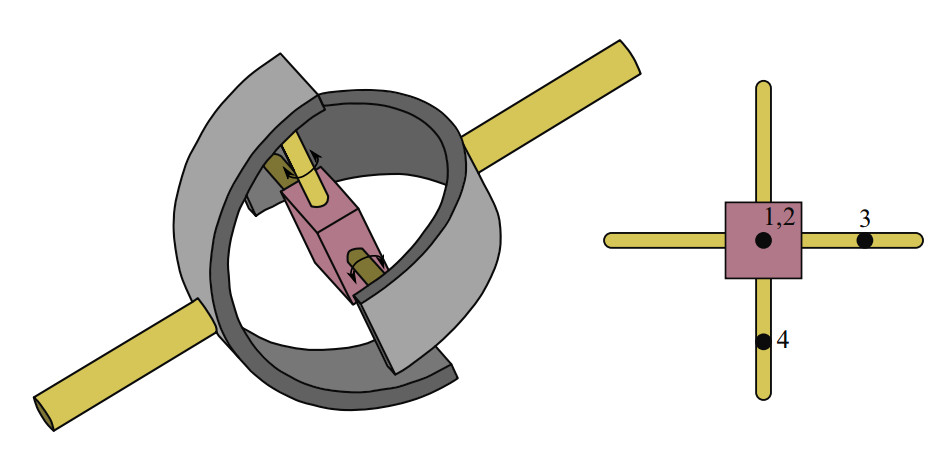
节点1和节点2是重合的,节点对(1、3)和(2、4)相互垂直,其是两个连接体相对旋转的轴线。仅可以绕(1、3)轴和(2、4)旋转,并保持(1、2)重合。
有限元建模
在两Part上分别创建节点1、2、3、4,如下图所示,节点1、3在同一个Part,节点2、4同一个Part。

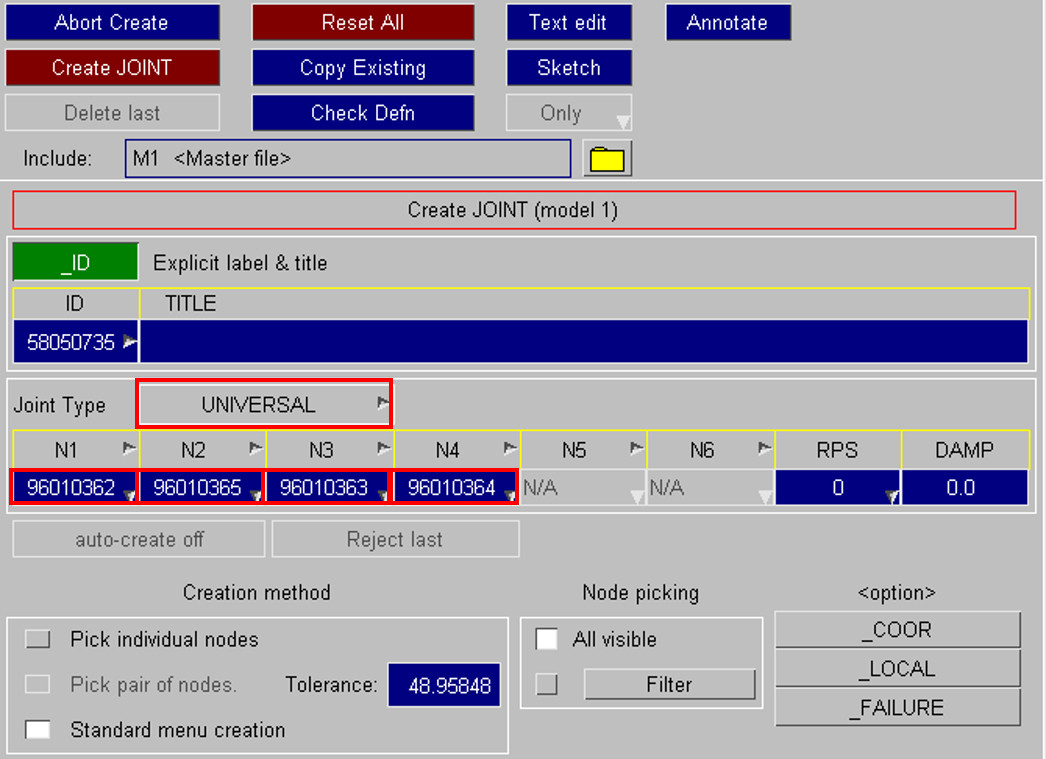
点击Primer中的CONSTR下拉菜单,选择JOINT,进入如下图所示创建铰链的界面,界面中的N1、N2、N3、N4分别对应上图的节点1、2、3、4,节点选择完毕后,点击Creat JOINT创建转动铰,此时会弹出创建铰链错误信息,点击CONTINUE,即可完成转动铰的创建。
Primer提示错误信息如下图所示:
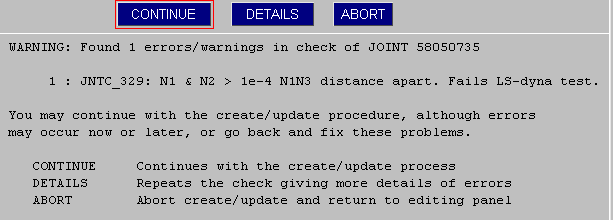
错误信息提示:节点1和节点2未重合。将节点1、2移到节点5(节点5为节点2和节点4的中点)位置处,移动方法同上。
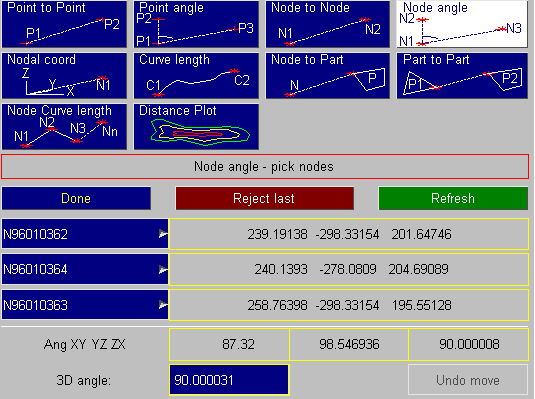
节点1、2设置重合后,需要对节点3、4、5所成的角度设置为90°。
角度设置的方法:点击Measure,选择Node angle,依次选择节点5、3、4,角度为90.000031°;若该角度不是90°,则需要进行更改。
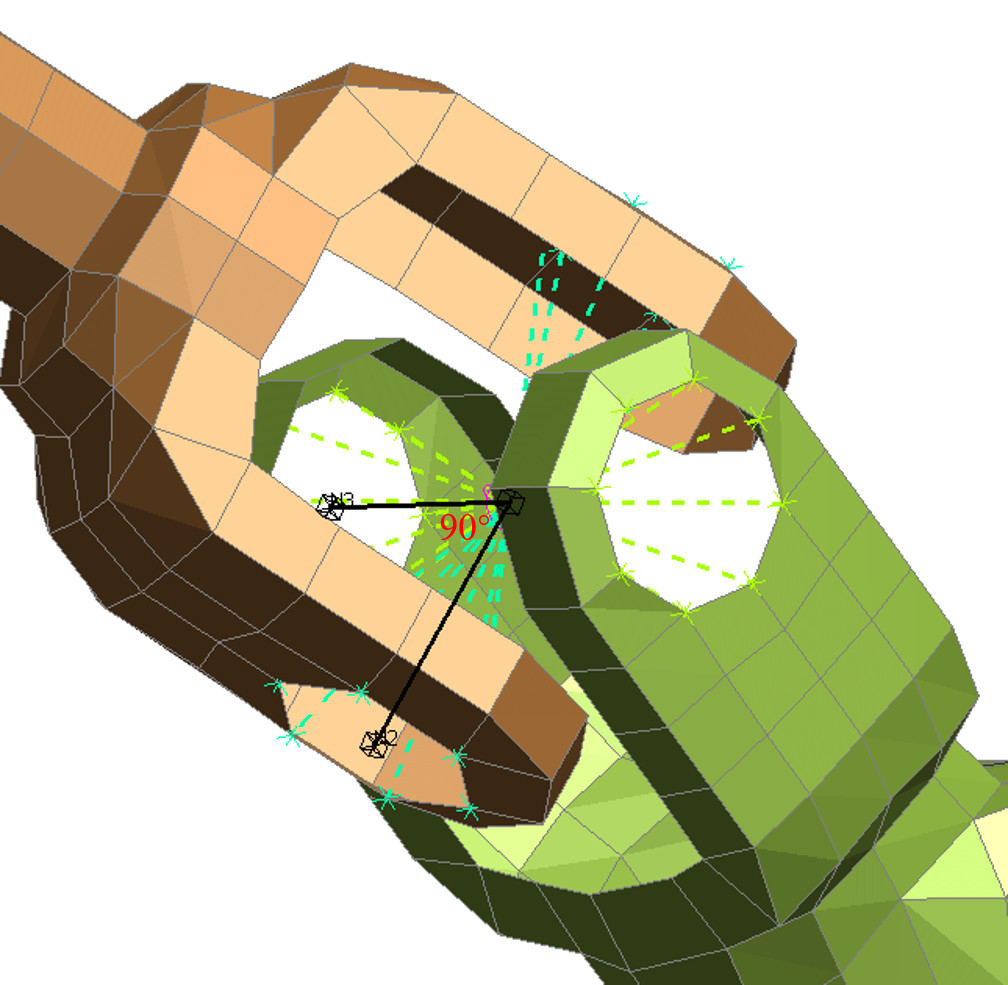
节点3、4、5所成角度如下图所示:



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
