




 广告
广告





















































艾尔动力告诉你:商用车整车测试如何实现无人化!
2019-09-14 18:26:24· 来源:艾尔动力

整车测试无人化的初衷是利用机械、电子及软件等设备替代人,把人从繁重、重复、颠簸的测试场景中解放出来,并且由人为主观性判断的经验转化成客观数字,实验结果
整车测试无人化的初衷是利用机械、电子及软件等设备替代人,把人从繁重、重复、颠簸的测试场景中解放出来,并且由人为主观性判断的经验转化成客观数字,实验结果具有可复制性,数字化,精准化的特点。
理想总是梦幻,现实也没有那么骨感。
北京艾尔动力科技有限公司是在北京航空航天大学交通学院无人驾驶团队的基础上成立的,拥有丰富的无人驾驶系统开发经验和优质的整合资源。公司团队成员在无人驾驶领域深耕多年,进行了诸多科研探索,并摸索出一些独到体系化解决方案,在业界拥有较高的知名度。

艾尔动力推出的整车测试控制系统旨在模拟驾驶员特性,根据环境感知系统的信息、定位导航系统的信号、预先设定的目标和车辆的运行状态等进行综合决策,具体可通过控制系统计算方向盘转角、换挡、油门和制动踏板行程等控制量;借助电机等驱动装置驱动执行机构操纵转向盘、换挡、油门或制动踏板实现车辆换转弯、换挡、加速、制动等功能。
兼顾现成保有车辆及将来线控车辆的控制行驶:
基于传统车辆,以长安大学智能网联测试场与交通部北京通州测试场应用场景为原型,自动驾驶机器人通过遥控器,可在汽车试验中代替真实驾驶员,准确操纵和控制车辆按照预定规范行驶,安全有效地完成智能网联与ADAS测试。
基于线控车辆,以中国第一汽车股份有限公司E115新能源汽车为原型,在APP(WEB)端下发任务,自动驾驶控制系统准确操纵和控制车辆按照预定规范行驶,安全有效地完成耐久性测试。
艾尔动力驾驶机器人的特性
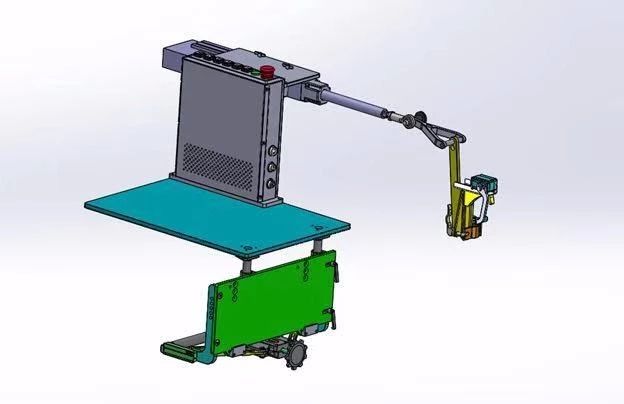
 艾尔动力驾驶机器人的各执行机构
艾尔动力驾驶机器人的各执行机构艾尔动力整套人机共驾机器人包括转向机器人,踏板机器人,换挡机器人等分支机构。
各执行机构作为人机共驾机器人的分支机构,既可以单独控制使用,也可以组合控制使用,完全根据客户需求灵活定制。
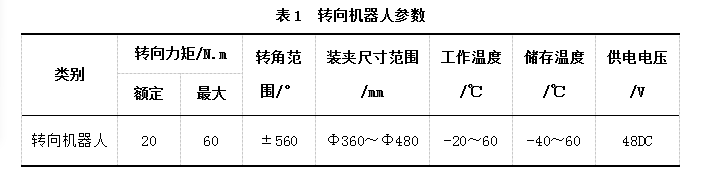
1.转向机器人

转向机器人主要用来代替驾驶员的双手转动方向盘,从而实现对车辆的横向控制以及循迹功能。转向机器人相较于驾驶员操作方向盘而言,具有更高的精度和更强的加速度。
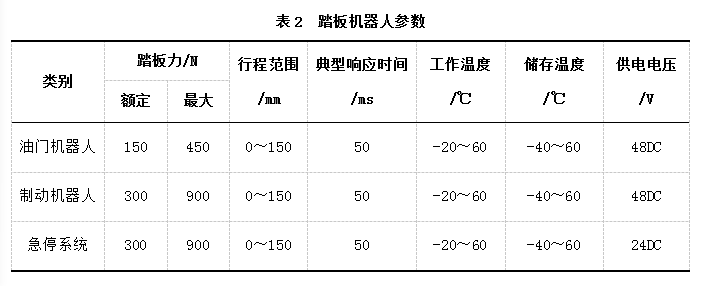
2.踏板机器人

踏板机器人采用仿生原理,模拟人腿分别控制车辆的油门和制动。值得一提的是,独立于主系统之外的急停系统在遇到情况时,会通过单独的执行机构(急停机械腿)踩下刹车,将车辆刹停。
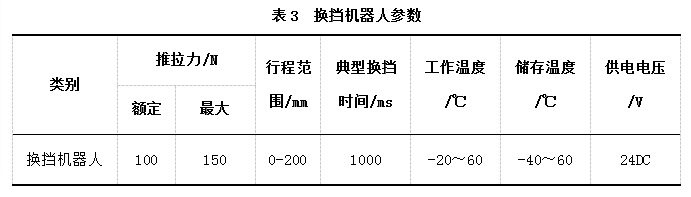
3. 换挡机器人
换挡机器人属于选配件,一般匹配自动挡,且挡位为直线型,一般安装于副驾驶座位上。在具体的自动驾驶方案中,有些场景不需要靠外力变换挡位,可以不安装换挡机器人。

艾尔动力驾驶机器人的试配
1. 试配车辆
由于艾尔动力人机共驾机器人V2.0的设计本身试配兼容性强,安装简便,无需改装车辆。所以一般的车型都可以完成试配。
2. 试配驾驶动作
选用的试验车提前采集路径信息,经过反复修剪、检查,形成可执行的路径文件
驾驶机器人系统可以满足车辆正常行驶中所需要的大部分功能要求,例如匀速,加速,减速,定点停车,倒车(需配合换挡机器人)等。速度值和加速度值在一定范围内可以随时设定和修改,具有极大的灵活性。
艾尔动力驾驶机器人的安全系统
艾尔动力人机共驾机器人V2.0系统专为汽车道路测试试验设计,具备十分完善的安全保障措施。
1. 远程遥控
人机共驾机器人V2.0在试验车辆上完成试配后,车辆的起步、停车等动作均可以通过无线遥控器控制完成。并且,无线遥控器的有效距离可以达到1000米。
2. 急停系统
人机共驾机器人V2.0系统在主系统之外,有一套完整的备份系统,称之为急停系统。急停系统在电源、控制、通讯、执行等环节是完全独立的。在机器人主系统运行的过程中,急停系统与主系统保持实时通讯并检测主系统的运行状况,如果发现主系统出现问题,或者失去了与主系统之间的通讯,急停系统会通过单独的执行机构(急停机械腿)踩下刹车,将车辆刹停。

3. 安全模块
安全模块一方面在激光雷达毫米波雷达,GPS等高科技设备与技术的支撑下,可提前感知、迅速决策、精准绕过障碍物(包括人);另一方面还可以设置边界限制条件,例如:起始点位置、航向角、行进速度等。一旦车辆超出预设的边界限制条件,安全系统会立即下达禁止启动或停车的决策并上传故障信息。







最新资讯
-
曼恩和ABB成功测试基于以太网通信的电动重
2025-04-21 21:18
-
一文讲述汽车电子电气EEA架构
2025-04-21 20:58
-
中汽中心受邀参加中国消费品质量安全提升系
2025-04-21 20:57
-
标准解读 | 新版动力电池安全强标解读
2025-04-21 20:56
-
标准解读丨深圳地标《智能网联汽车自动驾驶
2025-04-21 20:54
