




 广告
广告





















































一文了解汽车正投影面积精确测量神器
2019-07-26 20:08:51· 来源:中国汽研汽车风洞技术

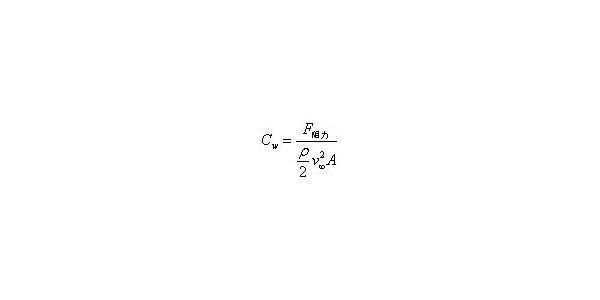
汽车风阻系数计算公式近年来,汽车风阻系数作为评价汽车气动性能的关键指标,越来越被车企和公众所关注。通过风洞试验测量汽车风阻系数Cd 时,通常采用风洞配置

汽车风阻系数计算公式

近年来,汽车风阻系数作为评价汽车气动性能的关键指标,越来越被车企和公众所关注。通过风洞试验测量汽车风阻系数Cd 时,通常采用风洞配置的高精度天平系统测量汽车气动阻力F,然而对于汽车正投影面积A的测量,业内使用了不同的测量设备 。本期将介绍测量精度较高的两种测量工具——三维扫描系统和3D正投影面积测量系统。
三维扫描系统
以中国汽研(CAERI)汽车风洞中心所拥有的加拿大Creaform三维扫描系统为例进行说明。该系统包括两台Handyscan 700手持式自定位三维激光扫描仪和一台Maxshot 3D Next手持式光学拍照定位系统,三台设备可配合使用。
工作原理
Handyscan 700使用光学反射靶形成锁定至部件自身的参考系统,在扫描期间样件和扫描仪都可以移动,从而可以避免扫描死角,扫描样件数据更完整,而且周围环境的变化丝毫不会影响数据采集的质量和精度。两台扫描仪可以独立使用、也可以单独使用、两套扫描仪可以共用一个坐标系文件,可以大大加快测量速度,所有测量的扫描数据都可以统一坐标系。主要技术参数如下:
- 体积精度:0.02 mm+0.06 mm/m
- 单点示值误差:0.03 mm
- 单点重复性:0.01 mm
- 坐标重复性:0.02 mm
- 分辨率:最高0.05 mm
- 扫描频率:480,000次/秒
Maxshot 3D Next拍照定位系统主要用于保证大空间定位的高精度,以消除测量误差;对于尺寸较大的样件,扫描精度可以提高40%。该系统可以测量1-15米范围内的样件,大大提高测量空间及精度,而且测量约束更少,无论多大的样件都可以测量。主要技术参数如下:
- 体积精度:0.025 mm/m
- 平均偏差:0.008 mm/m
- 样件尺寸范围:无限制
- 空间距离重复性:0.02 mm
重要说明:
当Handyscan 700和Maxshot 3D Next配合使用时,体积精度可达:0.02 mm+0.025 mm/m。
技术特点

Creaform三维扫描系统完美结合了激光扫描与影像测量技术特点,内置了AICON影像测量定位技术,实现动态测量并且保证其扫描的精度。
该系统的目标点自动定位技术,无须测量臂或其他跟踪设备进行组合扫描,自动拼接不同部位的扫描数据,扫描时可以随意翻动或移动工件而不影响扫描精度,对工件没有特别装夹要求,非常适合于工件正反两面扫描,保持正反两面的数据在同一坐标系下,无需人为对正反两面的点进行拼接。

整车车身扫描
装配扫描和组合扫描:可以将具有装配关系的零部件先用内置的摄影定位技术确定位置关系,然后将零部件依次拆下、扫描,而其数据照样保持原来的装配关系。整个过程无需人为对坐标,所有开闭件的位置将自动的对齐到整车坐标系,开闭件的各级开度整体扫描统一在同一坐标系内,便于后期计算数据,由于无需再人工对坐标,减少了人为偏差。


装配扫描和组合扫描
该系统的扫描几乎无限制:不受样件尺寸大小、复杂程度、原材料或颜色的影响。可在狭窄的空间扫描,且样件可以自由移动;如汽车内部仪表板、驾驶舱等。
主要功能
在汽车行业,该系统可用于汽车整车及零部件扫描,汽车内饰3D扫描;在其他制造行业,该系统可用于磨具、夹具和模型的逆向工程扫描,3D扫描质量检测,3D扫描模拟装配,3D扫描磨损分析;在其他行业,比如文化创意领域,可进行人像和文物扫描。
3D正投影面积测量系统
中国汽研(CAERI)汽车风洞中心拥有全球首套3D正投影面积测量系统,该系统由德国GFAI公司提供,主要包括14台FARO高速三维扫描仪和相应的数据采集处理系统。
工作原理
3D正投影面积测量系统配备了14台FARO高速三维扫描仪,FARO扫描仪可发出红外线,测量红外线到达物体表面的时间,从而计算出物体表面测量点的距离,在几分钟内为复杂的环境和几何构型建立起3D点云模型。
在正投影面积测量室内,分别在天花板高度5.6米、墙面高度1.5米、地面高度布置14台FARO高速三维激光扫描仪。

正投影面积测量房间的FARO扫描仪布置方式
该系统利用14台FARO扫描仪对车辆外形进行精确扫描,快速计算并生成车辆外形3D点云模型,根据使用者需求输出车辆表面模型并计算车辆正投影面积,用于风洞测试风阻系数的计算;也可以在后台软件中通过已知扫描仪的位置偏移量进行拟合处理,输出车辆3D拟合模型或点云模型用于CFD仿真计算和麦克风声源定位测试。
整车3D扫描结果展示
整车扫描3D数字模型

正投影面积的计算
技术特点及主要功能
3D正投影面积测量系统利用3D定位原理,相较于常规2D激光追踪定位测量正投影面积方法,具有测量快速、结构简单、测量精度高等特点,可以准确捕捉车身表面及底盘上的孔洞。
在中国汽研汽车风洞与德国FKFS汽车风洞对标工作中,使用中国汽研汽车风洞3D正投影面积测量系统以及FKFS汽车风洞2D激光追踪定位测量系统分别对同一款对标车进行正投影面积测量,发现3D正投影面积测量系统可以精确扫描出车身底盘前部两侧的孔洞从而获得更准确的正投影面积数据,进而可用于风阻系数的精确计算。

对标车底盘前部孔洞实拍

3D正投影面积测量系统测量结果

2D激光追踪定位测量系统测量结果
3D正投影面积测量系统可根据用户需求单独扫描输出被测车辆的正投影面积,整个扫描过程仅需20分钟,不仅实现了测试结果的高精度,而且实现了测试过程高效率。
此外,如果用户有需求,3D正投影面积测量系统还能借助后台软件自动拟合车辆点云图,输出整车3D扫描数字模型,整个扫描过程需要2小时,扫描得到的数字模型可用于麦克风阵列声源定位分析以及CFD仿真计算等。






最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
