




 广告
广告





















































AVL在2019世界新能源汽车大会上的演讲——自动驾驶:客户期望,挑战和解决方案
2019-09-14 18:20:32· 来源:AVL李斯特

2019年7月1~3日,2019世界新能源大会在博鳌如期举行。AVL专家Dr. Peter Schggl在自动驾驶与城市未来出行分论坛上,就自动驾驶客户期望,挑战和解决方案话题与到场
2019年7月1~3日,2019世界新能源大会在博鳌如期举行。AVL专家Dr. Peter Schöggl在“自动驾驶与城市未来出行”分论坛上,就“自动驾驶——客户期望,挑战和解决方案”话题与到场嘉宾展开交流,并获得热烈反响。以下,是Dr. Peter Schöggl的现场报告和演讲速记稿。
Dr. Peter Schöggl:大家早上好!非常感谢邀请我来参会,也非常感谢世界新能源汽车大会的举办,那我们今天有翻译,我就直接讲英语,我想要给大家介绍一下AVL在自动驾驶技术方面的挑战和愿景,以及一些新的解决方案。
那我们首先还是要先了解一下自动驾驶的定义,如图所示,我们可以清晰地了解到L3到L5的情况。现在也刚刚进入L3,虽然有点晚,但是我觉得接下来所用的功能还是主要为解决拥堵服务。而且现在的市场发展得非常好,我们可以看到很多的公司和相关方在从L2向L3转换。
我们到底有怎么样的客户期待?比如更多的舒适性,提高性能和效率,但是在这边没有提到的就是,其实在自动驾驶的时候大家想做的事情是不一样的,比如可能需要跟别人社交、网购、工作、休息或吃东西,这些需要进入L4才能实现,因此这就成为我们发展的一个重要动力。
其一,新技术的开发。比如摄像头,其实我们的眼睛也算是一种摄像头。在自动驾驶领域,摄像头是一个非常重要的部分,未来摄像头的开发将更注重更好的性能,我们可以通过向鹰眼来学习并复制。其二,开发的时间成本。几年前宝马和英伟达也有提到过,依照目前我们现有传统的测试方法,L4的开发成本是很高的。其三,对于安全的高要求。
这里,我还需要提到人类行为对于自动驾驶的影响。调查显示,在美国和一些地方,有一些人是害怕自动驾驶技术的,这个可能大家都理解;在英国,甚至有一些人不太能接受自动驾驶;在日本,自动驾驶技术的车也并不受欢迎。其实我觉得,随着自动驾驶成本的降低和技术的进步,人们会越来越接受自动驾驶,以及随之而来的生活的改变。
那自动驾驶的未来会怎样发展呢?这两点对我们来说非常重要。我们一直希望将自动驾驶面临的挑战转化为价格更为合适,效率更为高的运输方式,比如说像宝马、梅赛德斯都在开发一些工具能够使车辆拥有更好的视觉。而我们发现开车的时候,人们会根据不同场景做出不同的判断及预期。比如:人类驾驶员会根据驾驶状态来调整速度,因此,自动驾驶也需要做出相应的调整,假如你在读邮件,可能需要一个速度,假如你在看外边,也可能需要另外一个速度;另外,自动驾驶也需要根据外界路面的情况来调整速度,假如前面有交通拥堵,速度可能需要调低,假如前面有个弯道,速度也需要调整。特斯拉出的第一款车型的测试就是在这样的道路上进行的。
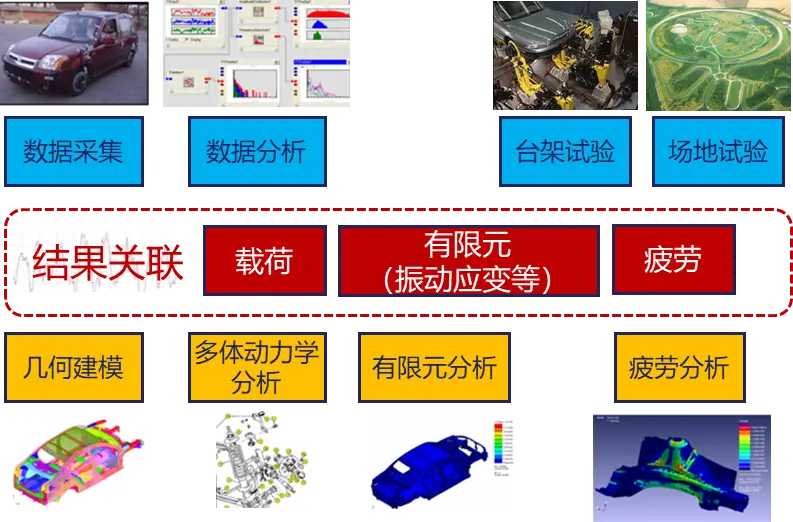
一辆自动驾驶的车有了视觉,就能够了解前后方车的动向,我们公司所做的就是结合了AI技术,综合考虑我刚才提到的所有因素,并且实时评估整体的速度以及安全性。大家可以看到第一个图就是环境对环境的探知,第二个图结合了不同的传感器,第四个图是整体参数的计算,第五个图是物体探知。
那我们可以看到这个视频上,AVL DRIVE既可以探知本车和前方车辆的距离。AVL DRIVE又可以在整个过程中会不停地进行动态的感知和评估。
之前我们也提到了开发的一个关键就是模拟,通过模拟,我们需要对整体车辆的运营环境进行评估,然后把这个评估运用到现实当中去。在整个开发过程中,我们需要定义不同的阶段,然后先进行测试,再进行应用,最后达到车队管理等目标。
那这个图是我们希望给客户达到的目标,我们可以只第二行,其实就是整体的质量情况,1到10,1是最差的,10是最满意的,我们在给客户提供解决方案之前,会先给客户进行评估,他想达到什么程度,我们就提供什么样的解决方案。
这个地方本来是有视频,展示的是在不同场景之下我们的模拟,就比如说有一个场景就是自动驾驶车辆在行驶的时候,后车想要直接变道超车,我们可以看到这两辆车的行进路线被模拟出来,自动驾驶车辆将如何调整自己的速度。同时有了这个场景,我们也可以开发出更多新的场景。
这里展示的是目前已有的用例,结合用例要求进行测试,我们也可以在模拟过程当中进行评估。
评估整套体系和解决方案的质量,我们是有一套标准的,首先根据目标进行开发,开发之后进行模拟。
这个图是我们进行测试L4的案例,我们可以看到,这个车道的左边其实比右边,行车起来更加危险一些,所以我们可以使用我们公司的物体探知功能,来规避可能会有的风险,而且我们整个测试已经积累了几万多公里了。
道路上本身就有很多的变量,我们希望能够尽量地避免任何可能出现的碰撞情况,我们也希望我们开发出的这套系统能够更好地被人们所使用。通过微软和亚马逊云,我们每个星期可以做一亿里程的模拟测试,并上传至我们云端的数据库,我们未来还会进行更多的模拟测试,这样就可以更精准地对真正的行车场景进行模拟。
最后一个应用就是我们虚拟验证系统,虚拟验证可以看到分成红色和绿色两种,通过两种不同的颜色,来显示出不同的参数,这个应用也可以应用到车队当中。
给大家简单做一个总结,我们现在考虑的自动驾驶的问题,很多是安全的问题,我们觉得自动驾驶会允许我们更好地利用在车内的时间,我们可以上网和点餐,实际上解放了司机的双手。如果真正能够达到这个水平,我们相信人们其实愿意为其买单。
另外强调的就是人类的因素在整个的自动驾驶过程当中是非常重要的,如果我们来看自动驾驶规划之间的不同的话,就会发现其实重点不在于车是怎么自动驾驶,而是在于我们要怎么预测人的行为。另外我们需要通过模拟,积累越来越多的数据,从而进一步缩短我们开发的周期。
Dr. Peter Schöggl:大家早上好!非常感谢邀请我来参会,也非常感谢世界新能源汽车大会的举办,那我们今天有翻译,我就直接讲英语,我想要给大家介绍一下AVL在自动驾驶技术方面的挑战和愿景,以及一些新的解决方案。
那我们首先还是要先了解一下自动驾驶的定义,如图所示,我们可以清晰地了解到L3到L5的情况。现在也刚刚进入L3,虽然有点晚,但是我觉得接下来所用的功能还是主要为解决拥堵服务。而且现在的市场发展得非常好,我们可以看到很多的公司和相关方在从L2向L3转换。
我们到底有怎么样的客户期待?比如更多的舒适性,提高性能和效率,但是在这边没有提到的就是,其实在自动驾驶的时候大家想做的事情是不一样的,比如可能需要跟别人社交、网购、工作、休息或吃东西,这些需要进入L4才能实现,因此这就成为我们发展的一个重要动力。
其一,新技术的开发。比如摄像头,其实我们的眼睛也算是一种摄像头。在自动驾驶领域,摄像头是一个非常重要的部分,未来摄像头的开发将更注重更好的性能,我们可以通过向鹰眼来学习并复制。其二,开发的时间成本。几年前宝马和英伟达也有提到过,依照目前我们现有传统的测试方法,L4的开发成本是很高的。其三,对于安全的高要求。
这里,我还需要提到人类行为对于自动驾驶的影响。调查显示,在美国和一些地方,有一些人是害怕自动驾驶技术的,这个可能大家都理解;在英国,甚至有一些人不太能接受自动驾驶;在日本,自动驾驶技术的车也并不受欢迎。其实我觉得,随着自动驾驶成本的降低和技术的进步,人们会越来越接受自动驾驶,以及随之而来的生活的改变。
那自动驾驶的未来会怎样发展呢?这两点对我们来说非常重要。我们一直希望将自动驾驶面临的挑战转化为价格更为合适,效率更为高的运输方式,比如说像宝马、梅赛德斯都在开发一些工具能够使车辆拥有更好的视觉。而我们发现开车的时候,人们会根据不同场景做出不同的判断及预期。比如:人类驾驶员会根据驾驶状态来调整速度,因此,自动驾驶也需要做出相应的调整,假如你在读邮件,可能需要一个速度,假如你在看外边,也可能需要另外一个速度;另外,自动驾驶也需要根据外界路面的情况来调整速度,假如前面有交通拥堵,速度可能需要调低,假如前面有个弯道,速度也需要调整。特斯拉出的第一款车型的测试就是在这样的道路上进行的。
一辆自动驾驶的车有了视觉,就能够了解前后方车的动向,我们公司所做的就是结合了AI技术,综合考虑我刚才提到的所有因素,并且实时评估整体的速度以及安全性。大家可以看到第一个图就是环境对环境的探知,第二个图结合了不同的传感器,第四个图是整体参数的计算,第五个图是物体探知。
那我们可以看到这个视频上,AVL DRIVE既可以探知本车和前方车辆的距离。AVL DRIVE又可以在整个过程中会不停地进行动态的感知和评估。
之前我们也提到了开发的一个关键就是模拟,通过模拟,我们需要对整体车辆的运营环境进行评估,然后把这个评估运用到现实当中去。在整个开发过程中,我们需要定义不同的阶段,然后先进行测试,再进行应用,最后达到车队管理等目标。
那这个图是我们希望给客户达到的目标,我们可以只第二行,其实就是整体的质量情况,1到10,1是最差的,10是最满意的,我们在给客户提供解决方案之前,会先给客户进行评估,他想达到什么程度,我们就提供什么样的解决方案。
这个地方本来是有视频,展示的是在不同场景之下我们的模拟,就比如说有一个场景就是自动驾驶车辆在行驶的时候,后车想要直接变道超车,我们可以看到这两辆车的行进路线被模拟出来,自动驾驶车辆将如何调整自己的速度。同时有了这个场景,我们也可以开发出更多新的场景。
这里展示的是目前已有的用例,结合用例要求进行测试,我们也可以在模拟过程当中进行评估。
评估整套体系和解决方案的质量,我们是有一套标准的,首先根据目标进行开发,开发之后进行模拟。
这个图是我们进行测试L4的案例,我们可以看到,这个车道的左边其实比右边,行车起来更加危险一些,所以我们可以使用我们公司的物体探知功能,来规避可能会有的风险,而且我们整个测试已经积累了几万多公里了。
道路上本身就有很多的变量,我们希望能够尽量地避免任何可能出现的碰撞情况,我们也希望我们开发出的这套系统能够更好地被人们所使用。通过微软和亚马逊云,我们每个星期可以做一亿里程的模拟测试,并上传至我们云端的数据库,我们未来还会进行更多的模拟测试,这样就可以更精准地对真正的行车场景进行模拟。
最后一个应用就是我们虚拟验证系统,虚拟验证可以看到分成红色和绿色两种,通过两种不同的颜色,来显示出不同的参数,这个应用也可以应用到车队当中。
给大家简单做一个总结,我们现在考虑的自动驾驶的问题,很多是安全的问题,我们觉得自动驾驶会允许我们更好地利用在车内的时间,我们可以上网和点餐,实际上解放了司机的双手。如果真正能够达到这个水平,我们相信人们其实愿意为其买单。
另外强调的就是人类的因素在整个的自动驾驶过程当中是非常重要的,如果我们来看自动驾驶规划之间的不同的话,就会发现其实重点不在于车是怎么自动驾驶,而是在于我们要怎么预测人的行为。另外我们需要通过模拟,积累越来越多的数据,从而进一步缩短我们开发的周期。





最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
