




 广告
广告





















































结合线控转向和线控制动的横摆力矩容错控制
2019-10-16 00:13:26· 来源:同济智能汽车研究所

编者按:文章介绍了具有线控转向系统和线控制动系统的车辆横摆力矩容错控制。线控转向和线控制动分别可以提供主动前轮转向(AFS)和电子稳定程序(ESC)的功能。
编者按:文章介绍了具有线控转向系统和线控制动系统的车辆横摆力矩容错控制。线控转向和线控制动分别可以提供主动前轮转向(AFS)和电子稳定程序(ESC)的功能。而这两个线控系统作为电气设备,发生故障是必然的,这可能会带来严重的危险。本文结合了汽车用来产生横摆力矩的轮胎力情况,即汽车ESC系统产生的4个轮胎力,汽车AFS系统产生的2个轮胎侧偏力,这六者结合起来产生了汽车的横摆力矩。提出了一种基于变权重的加权伪逆控制的分配方法,用于解决执行器的故障问题。文章考虑到线控转向和线控制动系统的控制原理和优缺点,仔细分析判断线控转向应用在汽车上的故障原因和相应的危险。提出了汽车控制器对汽车横摆力矩进行直接控制的明确目的:即满足汽车驾驶的机动性和横向稳定性,给出一定程度的定性分析。本文在WPCA可变权重的控制方案中,就会将相应故障部件的可变权重设置为一个较高的值,一般会设置成1,这样就保证了在计算中不会生成该故障部件的轮胎力,而通过约束方程式计算后,增加其他的轮胎力,补偿由执行器故障引起的控制横摆力矩的损失。这样,在偏航力矩分配阶段,通过可变权重的WPCA可以比较容易地捕获和补偿执行器故障问题。文章采用的研究方法比较值得借鉴。
本文摘自:
International Journal of Automotive Technology
原文题目:
"FAULT-TOLERANT YAW MOMENT ConTROL WITH STEER AND BRAKE-BY-WIRE DEVICE"
原作者:S. YIM
原文链接:
https://link.springer.com/article/10.1007/s12239-014-0048-0
摘要:本文介绍了具有线控转向(steer-by-wire,SBW)和线控制动(brake-by-wire, BBW)设备的车辆的容错偏航力矩控制方案。SBW和BBW可以分别提供主动前转向(AFS)和电子稳定控制(ESC)功能。但是由于是电动设备,执行器和传感器的故障是SBW和BBW必然会面临的问题,这可能会严重损坏车辆。文章采用了简单的直接横摆力矩控制来设计车辆稳定性控制器,为了解决执行器故障,在偏航力矩分配过程中提出了一种基于变权重的加权伪逆控制分配方法。在汽车仿真软件CarSim上的仿真表明,所提出的方法对于故障安全有效。
关键词:容错控制,线控转向,线控制动,电子稳定程序,主动转向,基于加权伪逆的控制分配。
1 简介
在过去的二十年中,已经开发出了几种类型的电机驱动的线控转向和线控制动装置(Sundar和Plunkett,2006年)。尽管与常规基于液压的系统相比,它们具有若干优点(例如:功耗小,重量轻),但它容易受到执行器或传感器故障的影响。
通常,执行器或传感器故障可能会对车辆控制系统造成严重影响。因此,有必要设计用于带有SBW和BBW的车辆的容错控制系统。
BBW装置有多种类型,例如机电制动器(EMB)和电动楔形制动器(EWB)(Xiang等,2008)。在本文中,假定将机电制动器(EMB)用作BBW装置。还假定前转向由SBW独立制动。图1显示了具有SBW和BBW的车辆的配置。如图1所示,控制单元收集方向盘角度和制动踏板角度的信号,并向SBW和EMB发出控制命令。借助SBW和EMB,分别可以使用AFS功能和基于差速制动的ESC功能,它们分别能在一定程度上提升汽车的操纵性和横向稳定性。
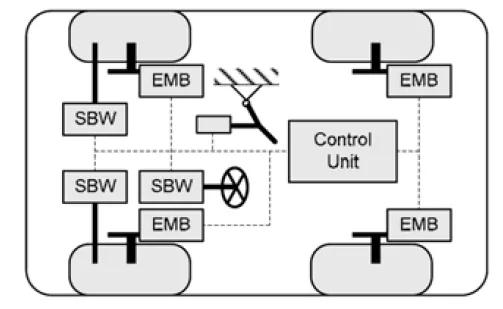
图1. SBW和BBW的配置组成
尽管迄今为止已经提出了关于故障检测或故障诊断领域的各种各样的研究,但是对于具有SBW和BBW设备的车辆的容错偏航力矩控制几乎没有相关研究。典型的研究是Hac的研究内容(Hac等,2006)。在Hac等人的工作中。(2006年),Hac提出了一种基于线性规划的最优分配方法,用于SBW和BBW的统一控制,以应对制动故障。遵循Hac等人的想法,本文提出了AFS和ESC对执行器和传感器故障的容错控制。
为了获得横向稳定性和可操纵性,设计了一个偏航力矩控制器。该控制器具有两级结构,即上级控制器和下级控制器。在上级控制器中使用滑模控制理论计算出控制横摆力矩后,将其与AFS和ESC一起分发到下级控制器中。为了将容错功能嵌入偏航力矩控制器中,采用了具有可变权重的加权伪逆控制分配(Yim and Yi,2011)。
WPCA可以实时解决问题,因为仅需要代数计算。此外,在可变重量的框架内很容易捕获执行器和传感器的故障。为了检查所提出方法的有效性,在车辆模拟程序包CarSim(机械模拟公司,2001)中进行了模拟。
本文的结构如下:在第2节中,设计了一个直接横摆力矩控制器,并提出了基于WPCA的容错横摆力矩分配方案;在第3节中,通过Carsim执行模拟仿真;在第4节中,给出结论。
2 相关工作
2.1 控制横摆力矩的计算
直接横摆力矩控制(Direct yaw moment control, DYC)。DYC使用了简单的2自由度自行车模型,如图2所示。该模型描述了车辆的偏航和横向运动。
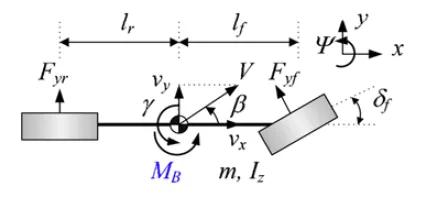
图2. 二自由度单轨模型
该模型的运动方程如下:

在公式(1)中,假定前转向角小于15°。由驾驶员的转向输入产生的参考横摆率在方程式(Rajamani,2006)中假定为横向轮胎力是线性的情况下,以代数公式(2)给出。在公式(3)中,αf和αr分别是前轮胎滑动角和后轮胎滑动角。
直接横摆力矩控制有两个目标。
首先是机动性,这意味着车辆能够遵循驾驶员的意图或参考横摆率。较小的横摆角误差表示良好的横摆角跟踪性能或可操作性。第二是横向稳定性,这意味着较小的质心侧偏角。由于较大的质心侧偏角(超过3度)表示车辆在漂移,因此偏航力矩控制器应减小质心侧偏角以提高横向稳定性。
为了使车辆遵循参考横摆率并减小质心侧偏角,采用了滑模控制理论。为了实现这些目的,将滑动表面定义为等式(4)。在公式(4)中,η是用于调整横摆角误差和质心侧偏角之间权衡的参数。为了使该滑动表面具有稳定的动力学特性,应满足条件公式(5)(Uematsu和Gerdes,2002)。

通过将方程式(4)与方程式(5)和(1)组合,可以得到控制横摆力矩MB,如方程式(6)(Yim 等。,2010)。

2.2 WPCA的最优横摆力矩分配
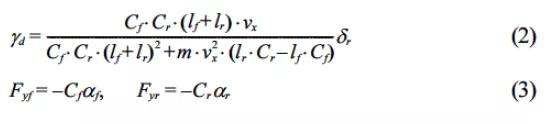
一旦计算出MB,就应将其通过SBW和BBW等执行器进行分配,这样也就分别实现了AFS和ESC功能。图3显示了用于生成MB的控制轮胎力。在图3中,Fx1,Fx2,Fx3和Fx4是ESC产生的纵向制动力。Fy1和Fy2是轮胎的侧向力,它们分别转换为左前轮和右前轮。这些控制轮胎力应确定为产生MB。
图3. 通过控制轮胎力来生成MB
基于加权伪逆的控制分配(WPCA)用于确定轮胎力,以生成MB。公式(7)表示出了控制轮胎力与MB之间的代数关系。在等式(7)中,矩阵H称为有效性矩阵(Wang和Longoria,2006)。
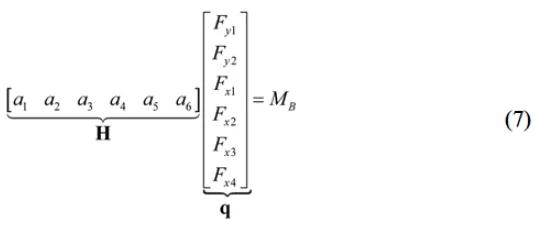
其中

遵循Wang和Longoria的工作思路,将WPCA的目标功能最小化的定义如下:
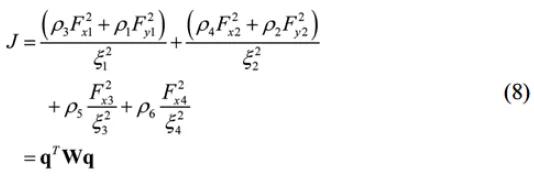
其中满足,
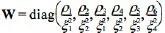 、
、 和ρ=[ρ1ρ2ρ3ρ4ρ5ρ6]。
和ρ=[ρ1ρ2ρ3ρ4ρ5ρ6]。在等式(8)中,垂直轮胎力的倒数意味着垂直轮胎力或轮胎-道路摩擦系数越大,纵向和横向轮胎力就越大,反之亦然。通过这种逆,它涵盖了摩擦圆的概念。在等式(8)中,ρ是虚拟权重的向量,其对应于q中的控制轮胎力。ρ用于捕获执行器和传感器故障,并限制轮胎的纵向和横向力。ρ的作用将在后面说明。
这个最小化问题是具有等式约束的二次规划。在这个问题上使用拉格朗日乘数技术,可以获得以下最佳解决方案:

如公式(9)所示,由于代数计算,WPCA既简单又快速。在获得最佳轮胎力qw之后,将每个轮胎力转换为制动扭矩TB和有效前转向角Δδf1和Δδf2,如下所示:
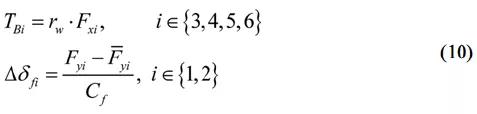
在公式(10)中,是前轮胎的当前横向力。垂直轮胎力是通过纵向和横向加速度估算的,如Cho等人的工作中所述。(2008)。
2.3 容错控制的可变权重集
在本文中,ESC和AFS被视为执行器配置。为了捕获WPCA中的执行器配置,引入了等式(8)中的可变权重设置ρ。如果在公式(8)中特定的可变重量ρi减小,则相应的轮胎力Fxi或Fyi增大,反之亦然。利用这一事实,可以为ESC和AFS的配置设置偏航力矩分配方案。
假设所有可变权重ρi都设置为1e-4。如果只有电调可用,并且控制横摆力矩MB为正值(如图4(a)所示),则制动扭矩可以施加到左轮。为此,为了不产生Fx2和Fx4,应该将ρ1,ρ2,ρ4和ρ6设置为较高的值,例如1。作为此设置的结果,只能从WPCA生成负值Fx1和Fx3。如果可以使用ESC和AFS,并且控制偏航力矩MB为正,如图4(b)所示,则应将可变权重ρ4和ρ6设置为1,以便不生成Fx2和Fx4。
遵循这种想法,可以按以下方式设置每种执行器配置的可变权重集:

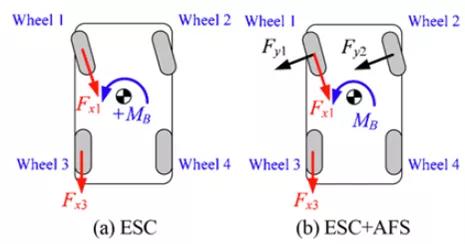
图4. 对应ESC和ESC + AFS的正MB的控制轮胎力
如果执行器出现故障,则无法生成相应执行器的控制轮胎力。在WPCA具有可变权重的框架中,应将相应的可变权重设置为一个较高的值,即1。例如,如果在ESC + AFS中左前轮的SBW发生故障,则方程式(12)中的可变权重ε1应该设置为1,就能保证不生成Fy1。然后,通过约束方程式(7)增加其他轮胎力,以补偿由执行器故障引起的控制偏航力矩的损失。这样,在偏航力矩分配阶段,通过可变权重的WPCA可以轻松捕获和补偿执行器故障。
这个想法与以前的工作相同(Hac等,2006)。在这项工作中,采用可变权重的线性规划作为控制分配方法。本文采用可变权重的WPCA,因为它比基于线性规划的控制分配方法更简单,更快捷。
2.4 可变权重的纵向和横向轮胎力的限制
通常,轮胎打滑受防抱死制动系统(ABS)的限制,因为过多的轮胎打滑率会引起纵向力的饱和和横向轮胎力的减小。在本文中,通过在横摆力矩分配阶段调整权重εi来调节轮胎滑移率。
为此,引入了Fx1,Fx2,Fx3和Fx4的新权重εiλ,如图5-(a)所示。由于AFS产生的前轮胎的横向轮胎力会因较大的轮胎滑移角而饱和,因此也应限制轮胎滑移角。为此,引入了Fy1和Fy2的新的可变权重ε1α和ε2α,如图5-(b)所示。对于可变权重ε1α和ε2α,由(13)确定从(11)至(12)的可变权重ρi。
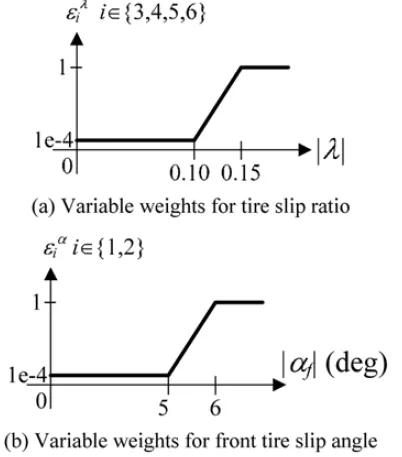
图5 可变权重以限制过度的轮胎滑移率和前轮侧偏角

3 仿真
在本节中,结合MATLAB Simulink在车辆仿真程序包CarSim上进行了仿真,以检查所提出方法的性能。
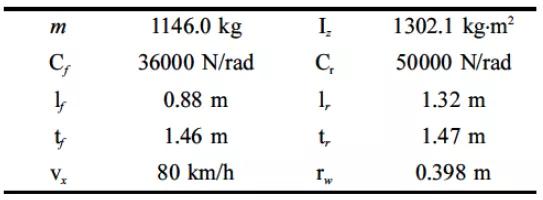
仿真是在Moose测试轨道上进行的闭环转向,如图6所示。转向输入是通过PID驱动器模型获得的,该模型通过将两个PID控制器在横向偏移误差和 航向角误差(Kang等,2008)。目标车辆模型是CarSim中提供的小型SUV。该模型的参数在表1中给出。车辆的初始速度设置为80 km / h,轮胎-道路摩擦系数设置为0.85。ESC和AFS的执行器被建模为一阶系统,其时间常数分别为0.05和0.01。
图6 Moose测试轨道
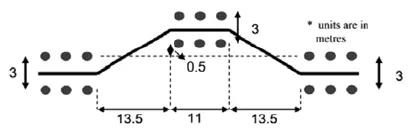
表1 CarSim中小型SUV模型的参数和对应取值。
假定执行器故障在2.5秒时发生在左前SBW。一旦发生故障,SBW的角度就被锁定。模拟中考虑了四种情况。第一种情况CASE1是故障下没有控制权。第二个案例是CASE2,它是在不考虑故障的情况下应用了横摆力矩控制。第三个案例CASE3是应用了建议的容错偏航力矩控制。在这种情况下,应将权重ρ1设置为1,以捕获SBW故障。可以在左前轮有转向角传感器的前提下施加制动输入。第四个CASE4与CASE3相同,除了没有转向角传感器。在这种情况下,无法输入制动输入,因为左前轮的转向角δf1是未知的,并且WPCA需要δf1的值,如公式(7)所示。结果,权重ρ3应该设置为1。
图7显示了每种情况的仿真结果。如图所示,建议的控制器CASE3在所有情况下均表现出最佳性能。与CASE3相比,CASE2显示出相对较好的结果。这意味着尽管偏航力矩控制功能较弱,但可以应付执行器故障。CASE4显示的结果比CASE2差。这是因为CASE4只有两个执行器,即右前轮的AFS和左后轮的制动扭矩。与此相反,CASE3使用了右前轮的AFS和左前轮和后轮的制动扭矩。从该结果可以得出结论,转向角信息在容错偏航力矩控制中是必不可少的。
图8显示了CASE2,CASE3和CASE4的制动扭矩和AFS角度。如图中CASE3和CASE4所示,左后轮的制动扭矩增加,右前轮的AFS角度减小,以补偿由故障引起的偏航力矩的损失。对于CASE4,制动转矩和AFS角会发生颤动,以调节滑移率和滑移角。这是由于只有两个执行器才施加了较大的轮胎力和AFS角,以补偿控制偏航力矩的损失。
在权重可变的WPCA中,始终满足约束方程式(7)。在这种情况下,如果由于执行器故障而无法产生某些控制轮胎力,则剩余的控制轮胎力将增加以满足约束方程式(7)。结果,剩余的控制轮胎力容易饱和。为了避免这种情况,将图5中给出的相应可变权重设置为较高的值。以这种方式,相应的控制轮胎力减小。相反,另一个控制轮胎力饱和。通过这种方式,发生制动扭矩和AFS角度的颤动。避免抖动的唯一方法是调整曲线以改变权重,如图5所示。但是,目前没有系统的方法可以调整曲线。
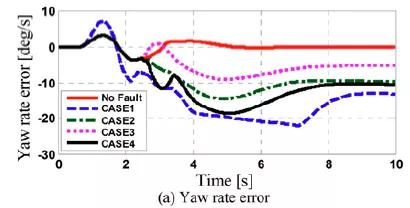
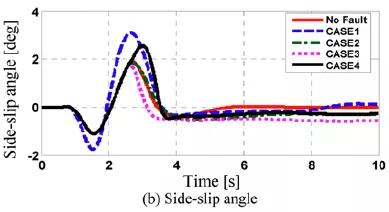
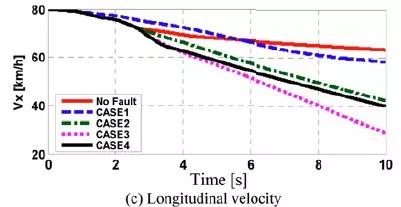
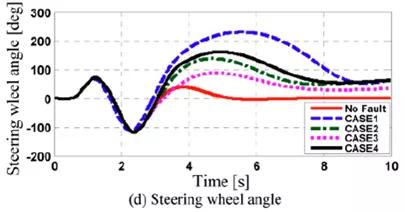
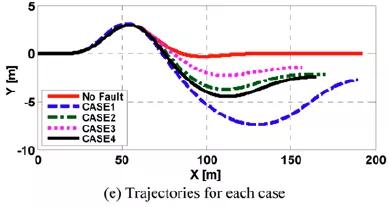
图7 SBW故障时每种情况的仿真结果
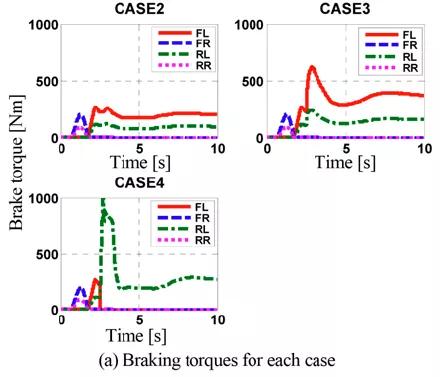
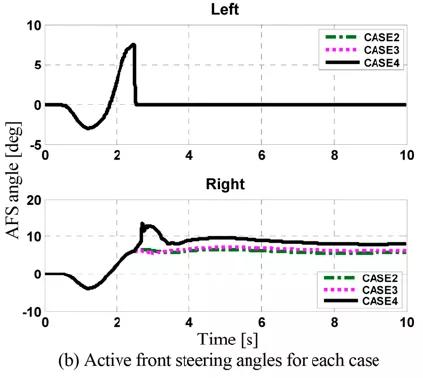
图8 SBW故障时每种情况的控制输入
4 结论
4 结论
在本文中,提出了使用SBW和BBW的偏航力矩控制以实现故障安全。提出了具有可变权重的WPCA,以捕获多种执行器配置(例如ESC和ESC + AFS),并捕获执行器和传感器故障。通过仿真表明,该方法可以有效地解决执行机构在横摆力矩分布中的故障,并且转向角信息在容错横摆力矩控制中是必不可少的。
参考文献
[1] Cho, W., Yoon, J., Kim, J.,Hur, J. and Yi, K. (2008). An investigation into unified chassis control schemefor optimised vehicle stability and maneuverability. Vehicle System Dynamics,46, Supplement, 87−105.
[2] Hac, A. (2006). Control of brake- and steer-by-wire systems during brake actuator failure. SAE Paper No. 2006-01-0923.
[3] Hac, A., Doman, D. and Oppenheimer, M. (2006). Unified control of brake- and steer-by-wire systems using optimal control allocation methods. SAE Paper No. 2006-01-0924.
[4] Kang, J. Y., Noh, K. H. and Yi,K. (2008). Development and validation of a finite preview optimal control based human driver steering model. KSAE Conf., Seoul, Korea, 130−135
[5] Mechanical Simulation Corporation (2001). CarSim User Manual Version 5.
[6] Rajamani, R. (2006). Vehicle Dynamics and Control. Springer. New York.
[7] Sundar, M. and Plunkett, D.(2006). Brake-by-wire, motivation and engineering - GM sequel. SAE Paper No. 2006-01-3194.
[8] Uematsu, K. and Gerdes, J. C.(2002). A comparison of several sliding surfaces for stability control. AVEC2002, Japan.
[9] Wang, J. and Longoria, R. G.(2006). Coordinated vehicle dynamics control with control distribution. Proc.2006 American Control Conf., Minneapolis, Minnesota, USA, 5348−5353.
[10] Xiang, W., Richardson, P. C., Zhao, C. and Mohammad, S. (2008).Automobile brake-by-wire control system design and analysis. IEEE Trans.Vehicular Technology 57, 1, 138−145.
[11] Yim, S. and Yi, K. (2011). Design of active roll control system and integrated chassis control for hybrid 4WD vehicles. IEEE Int. Conf. Intelligent Transportation Systems, Washington DC, USA.
[12] Yim, S., Cho, W., Yoon, J. and Yi, K. (2010). Optimum distribution of yaw moment for unified chassis control with limitations on the active front steering angle. Int. J. Automotive Technology 11, 5, 665−672.
- 下一篇:揭秘:ESC性能测试
- 上一篇:自动驾驶仿真的道路网络工具RoadRunner



编辑推荐




最新资讯
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
-
[数据] 欧洲重卡2022年度平均比二氧化碳排
2025-04-29 08:37
-
(欧7、国七)天纳克低排放制动器
2025-04-29 08:32
-
塑料燃烧性能的测定(氧指数法)
2025-04-29 08:31
-
电子电工产品燃烧性能的测定(灼热丝法)
2025-04-29 08:29
