




 广告
广告





















































维宁尔激光雷达与毫米波雷达的区别
2019-10-26 16:07:57· 来源:维宁尔中国

维宁尔雷达系统雷达系统对可能发生的碰撞危险发出警报,避免车祸事故,并且可以辅助控制车辆在拥堵车道中的自动启停。雷达传感器记录了重要信息,例如距离、角度
维宁尔雷达系统
雷达系统对可能发生的碰撞危险发出警报,避免车祸事故,并且可以辅助控制车辆在拥堵车道中的自动启停。
雷达传感器记录了重要信息,例如距离、角度和速度。因此,它们是自动驾驶技术的核心。
目前,维宁尔主要应用的雷达产品,分为激光雷达和毫米波雷达两种。

维宁尔激光雷达
激光雷达,顾名思义,以激光为探测手段,向探测目标发射激光束作为探测信号,并根据从目标反射回来的信号获得目标的有关信息,如距离、方位、高度、速度、姿态、甚至形状等参数,对路况进行侦测,以便让自动驾驶系统进行合理调配。
维宁尔激光雷达可以对物体进行分类,检测车道标记,还可以用于相对于高清晰度地图精确定位本车。
听了上面这些描述,你是不是觉得激光雷达无所不能呢?
但事实上,小V接下来要介绍的雷达产品,比起激光雷达,也并不逊色哦。
维宁尔毫米波雷达
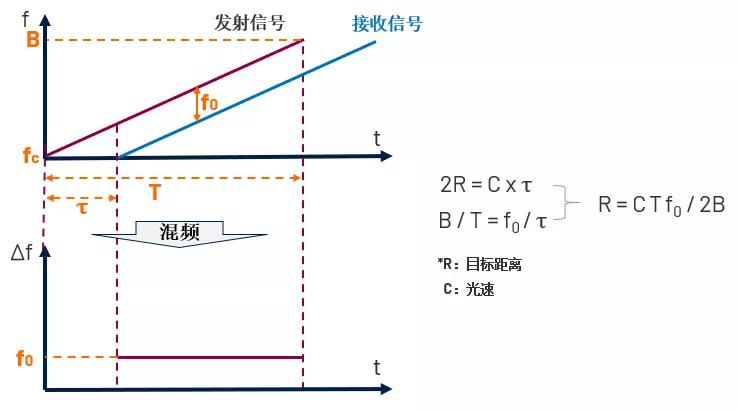
毫米波,其实就是频率为30-300GHz的电磁波,波长为1-10mm。毫米波雷达的工作方式,与激光雷达的基本原理类似,是将电磁波发出去,然后接收目标反射的回波,根据收发电磁波之间的差异,计算出目标的各种数据。
毫米波雷达通过合成器产生射频信号(RF),射频信号中的一路经过发射天线激发并在空气中传播,在照射到目标后发生反射,反射的信号被接收端天线接收;射频信号中的另一路从合成器产生出来后,与接收端天线接收的信号通过混频器进行混频。混频出的信号再经过低通滤波器(LPF)和低噪放大器(LNA)后成为中频信号(IF),然而该信号为模拟信号,计算机无法对其进行处理,故需要通过ADC(模数转换)模块对信号进行采样,将模拟信号转化为计算机可以处理的数字信号。

在完成了模拟转换之后,维宁尔雷达内置的芯片就开始发挥强大的作用。通过对数字信号进行FFT(快速傅里叶变换)等一系列运算,计算出目标所在的距离、角度和速度等信息,从而为进一步地实现各种安全功能提供数据。
距离:通过收发电磁波之间的时间差来计算获得。
角度:通过不同接收天线接收到的信号的相位差计算获得。

速度:通过两次收到的信号的相位差计算获得。

毫米波雷达利用电磁波而不是光线,与激光雷达相比,穿透雾、烟、灰尘的能力较强,探测性能稳定、作用距离较长、环境适用性好,更可实现全天候的探测。
维宁尔毫米波雷达系统,更有着独特的信号处理算法以及高带宽运行能力。维宁尔的雷达产品具有极佳的性能,并且作为自动驾驶系统中的关键组成部分之一,可以向自动驾驶控制器提供可靠、精确的环境目标信息。

维宁尔毫米波雷达产品,分为24GHz和77GHz两类。
- 下一篇:华晨宝马3系完成正面25%偏置碰撞试验
- 上一篇:同济&雄韬氢雄签订联合实验室协议



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
