




 广告
广告





















































ISO/TC22/SC32/WG8功能安全工作组-国际标准ISO21448预期功能安全(SOTIF)会议在卢森堡召开
2019-10-31 21:47:34· 来源:汽车标准化研究所

WG8功能安全工作组暨国际标准ISO 21448预期功能安全(SOTIF)第二次会议在卢森堡召开。该标准是国际上首个自动驾驶汽车安全标准,受到全球车企高度关注,来自法
WG8功能安全工作组暨国际标准ISO 21448预期功能安全(SOTIF)第二次会议在卢森堡召开。该标准是国际上首个自动驾驶汽车安全标准,受到全球车企高度关注,来自法国、德国、美国、英国、中国、以色列、比利时、意大利、瑞典、日本、荷兰、韩国、芬兰、卢森堡、瑞士、爱尔兰、立陶宛、奥地利等18个国家55名代表参会。中国代表团由来自中国汽车技术研究中心有限公司(全国汽车标准化技术委员会秘书处)的李波博士、泛亚汽车技术中心的尚世亮高级工程师、华为公司的刘航博士、胡文博士、大疆科技的张玉新博士、吴显亮博士6人组成。

本次会议着重讨论了预期功能安全国际标准ISO21448工作组草案(WD)及各国提案。中国代表团继ISO21448第一次上海会议成功提出13项提案后,此次共提出了29项提案,最终23项提案获得通过,并将集成到下一阶段的委员会草案(CD)中。
自动驾驶车辆的安全风险来源包含系统失效、功能局限性及网络安全等。国际标准ISO21448围绕自动驾驶车辆的功能局限性(含设计不足和性能局限),研究解决在复杂环境影响和人员合理误用的情况下,避免或降低车辆潜在的安全风险。该标准紧扣产品开发V模型过程,由13个章节及4个附录构成。与现有功能安全标准ISO26262相比,ISO21448标准增加了:
1.对自动驾驶安全风险的复杂影响因素及未知风险领域,提出了系统化的风险探测、验证确认和评价要求;
2.针对自动驾驶安全水平难以有效评价的国际性挑战,提出了基于目标市场场景、交通安全数据、功能危害行为及危害度量,定义SOTIF残余风险接受准则;
3.针对自动驾驶多系统融合,交互高度复杂的情况,提出了自动驾驶功能及系统设计的规范性要求,引入了新的分析方法(如STPA、SORA等)和测试手段(如随机测试、CornerCase测试等),识别车辆在可能的使用场景下(含人员误用)的风险触发事件,并对自动驾驶系统的安全设计改进提出了具体指导;
4.针对自动驾驶技术的发展方向,提出了机器学习(Machine Learning)、地图、V2X等针对性功能设计和验证确认要求。
基于汽标委秘书处制定的《功能安全(Function Safety)、预期功能安全(SOTIF)技术和标准研究中长期规划(2016-2025)》(以下简称“中长期规划”),车辆侧向/纵向运动控制关键电控系统可控性量化指标研究、安全评估模型建立、安全分析、测试评价方法研究等取得的阶段性成果,中国代表团提出的多项提案涵盖:
1.自动驾驶预期功能开发和测试评价的安全量化准则,涵盖功能和系统设计的量化目标要求、SOTIF危害场景的量化参数描述、自动驾驶预期功能的安全测试通过准则、自动驾驶预期功能的安全发布量化目标等,相关提案集成在标准草案第5、6、9、10、11、12等章节及附录B和附录C,并贯穿整个标准;
2.提升SOTIF标准对自动驾驶V模型左侧开发过程的指导,提出针对自动驾驶危害行为,识别整车功能层面、系统及组件层面的风险触发原因,并提供针对性的设计改进措施,相关提案集成在标准第7章;
3.自动驾驶运行场景因素优先度子集系列提案。根据自动驾驶功能、系统、组件及开发活动(定义ODD,V&V计划等)的相关性建立场景因素优先度子集,并根据敏感性、频次、严重性等定义优先度,以有效改善行业面临的自动驾驶安全开发和验证工作复杂度高、效率低下和花费巨大的痛点,相关提案将体现在标准第6章和附录B中;
4.针对自动驾驶关键的验证环节——真实场景测试,基于中国特点和需求,提出公共道路测试应具备的安全措施以防止或减轻潜在的风险,体现在标准草案第11章;针对测试通过准则,提出对优先度子集验证、目标市场失效率统计结果及合理安全余量的融合定义,体现在标准的第6章及附录C中;
5.针对自动驾驶技术发展方向,提出V2X系列提案,将V2X加入功能和系统设计、验证和确认测试中,体现在标准第5、9、10章及附录D中。
下一步,ISO21448标准将于2019年12月推出委员会版草案(CD),进一步征求各国意见,并计划2020年4月在韩国举行第三次全体会议。
为支持和规范自动驾驶车辆的发展,联合国UN/WP29设立了全新自动驾驶车辆工作组(GRVA),并确定了以ISO21448(SOTIF)、ISO26262为依据,制定国际自动驾驶安全法规。随着自动驾驶技术的持续升级并逐步迈向最终实现量产,ISO21448(SOTIF)标准的重要性和国际影响力将得到进一步提升。
基于国内“中长期规划”中相关研究成果,我国将深度参与和影响预期功能安全ISO21448(SOTIF)国际标准的制定,实现从追随者到积极贡献者的角色转变,并朝着最终实现引领者的目标不断前进。
本次会议着重讨论了预期功能安全国际标准ISO21448工作组草案(WD)及各国提案。中国代表团继ISO21448第一次上海会议成功提出13项提案后,此次共提出了29项提案,最终23项提案获得通过,并将集成到下一阶段的委员会草案(CD)中。
自动驾驶车辆的安全风险来源包含系统失效、功能局限性及网络安全等。国际标准ISO21448围绕自动驾驶车辆的功能局限性(含设计不足和性能局限),研究解决在复杂环境影响和人员合理误用的情况下,避免或降低车辆潜在的安全风险。该标准紧扣产品开发V模型过程,由13个章节及4个附录构成。与现有功能安全标准ISO26262相比,ISO21448标准增加了:
1.对自动驾驶安全风险的复杂影响因素及未知风险领域,提出了系统化的风险探测、验证确认和评价要求;
2.针对自动驾驶安全水平难以有效评价的国际性挑战,提出了基于目标市场场景、交通安全数据、功能危害行为及危害度量,定义SOTIF残余风险接受准则;
3.针对自动驾驶多系统融合,交互高度复杂的情况,提出了自动驾驶功能及系统设计的规范性要求,引入了新的分析方法(如STPA、SORA等)和测试手段(如随机测试、CornerCase测试等),识别车辆在可能的使用场景下(含人员误用)的风险触发事件,并对自动驾驶系统的安全设计改进提出了具体指导;
4.针对自动驾驶技术的发展方向,提出了机器学习(Machine Learning)、地图、V2X等针对性功能设计和验证确认要求。
基于汽标委秘书处制定的《功能安全(Function Safety)、预期功能安全(SOTIF)技术和标准研究中长期规划(2016-2025)》(以下简称“中长期规划”),车辆侧向/纵向运动控制关键电控系统可控性量化指标研究、安全评估模型建立、安全分析、测试评价方法研究等取得的阶段性成果,中国代表团提出的多项提案涵盖:
1.自动驾驶预期功能开发和测试评价的安全量化准则,涵盖功能和系统设计的量化目标要求、SOTIF危害场景的量化参数描述、自动驾驶预期功能的安全测试通过准则、自动驾驶预期功能的安全发布量化目标等,相关提案集成在标准草案第5、6、9、10、11、12等章节及附录B和附录C,并贯穿整个标准;
2.提升SOTIF标准对自动驾驶V模型左侧开发过程的指导,提出针对自动驾驶危害行为,识别整车功能层面、系统及组件层面的风险触发原因,并提供针对性的设计改进措施,相关提案集成在标准第7章;
3.自动驾驶运行场景因素优先度子集系列提案。根据自动驾驶功能、系统、组件及开发活动(定义ODD,V&V计划等)的相关性建立场景因素优先度子集,并根据敏感性、频次、严重性等定义优先度,以有效改善行业面临的自动驾驶安全开发和验证工作复杂度高、效率低下和花费巨大的痛点,相关提案将体现在标准第6章和附录B中;
4.针对自动驾驶关键的验证环节——真实场景测试,基于中国特点和需求,提出公共道路测试应具备的安全措施以防止或减轻潜在的风险,体现在标准草案第11章;针对测试通过准则,提出对优先度子集验证、目标市场失效率统计结果及合理安全余量的融合定义,体现在标准的第6章及附录C中;
5.针对自动驾驶技术发展方向,提出V2X系列提案,将V2X加入功能和系统设计、验证和确认测试中,体现在标准第5、9、10章及附录D中。
下一步,ISO21448标准将于2019年12月推出委员会版草案(CD),进一步征求各国意见,并计划2020年4月在韩国举行第三次全体会议。
为支持和规范自动驾驶车辆的发展,联合国UN/WP29设立了全新自动驾驶车辆工作组(GRVA),并确定了以ISO21448(SOTIF)、ISO26262为依据,制定国际自动驾驶安全法规。随着自动驾驶技术的持续升级并逐步迈向最终实现量产,ISO21448(SOTIF)标准的重要性和国际影响力将得到进一步提升。
基于国内“中长期规划”中相关研究成果,我国将深度参与和影响预期功能安全ISO21448(SOTIF)国际标准的制定,实现从追随者到积极贡献者的角色转变,并朝着最终实现引领者的目标不断前进。





最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
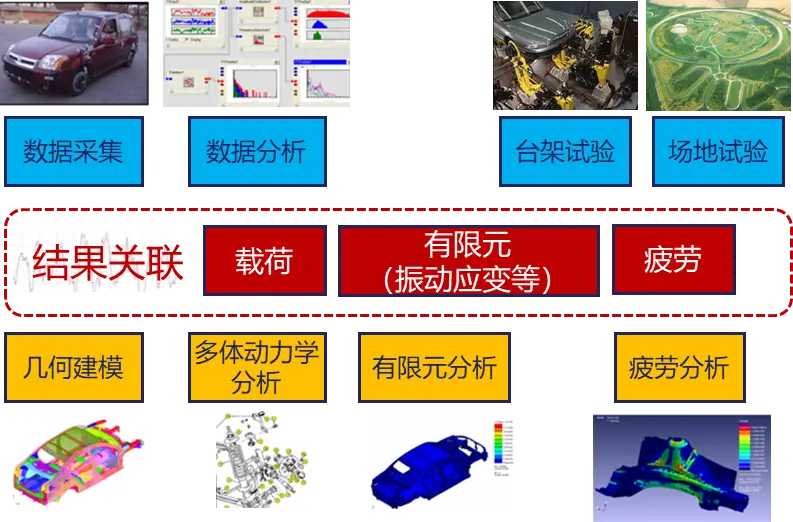
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
