




 广告
广告





















































硬件在环测试针对EPS的理论基础
2020-02-12 18:56:45· 来源:车辆技术 作者:师子一号

在某些测试场景下,逼真的整车模型还是挺有用的,比如针对EPS的HIL测试在我们的HIL第2讲和第3讲中(可以通过主菜单下面的干货文章目录中查看),我们详细剖析了
在某些测试场景下,逼真的“整车模型”还是挺有用的,比如针对EPS的hil测试
在我们的HIL第2讲和第3讲中(可以通过主菜单下面的“干货文章目录”中查看),我们详细剖析了,“实时仿真机”到底是个什么东东、“整车模型”到底是个什么东东,其实都挺简单的。
我们认为,在一般控制器的测试情况下,整车模型是不必要的,是负担,是会拖累测试工作的,尤其是测试VCU、BMS、BCM、GW、TBOX等大部分控制器的时候。
但是,整车模型在一些情况下还是很有用的,特别是在动态测试和场景测试的时候,比如EMS、TCU、EPS、ADAS等控制器,因为这种测试有个非常重要的特点:
不能通过端口输入输出组合,直观地判断ECU的功能是否满足要求,需要结合一些复杂的东西才能判定。进一步来 说,除了端口输入输出之外,这些控制器还会有很多参数需要调教,并且这些“参数调教”不方便在车上做,需要借助带复杂模型的HIL设备来优化参数设定!
下面,我们以EPS控制器的HIL测试为例,对其进行基本概念的介绍。
01、如何获取这类“整车模型”
用simulink编写吗? 不不不,这样效率太低了,而且很难做得准确,之所以有很多厂家在使劲推销simulink做的模型,那多半是因为经济利益驱使所致。
事实上我们可以从业内寻找现成的“模型”,它们的来源非常广泛,Carsim、Cruise、Siimulink等等,很多的,移植过来就好了。
软件 仿真
HIL中使用的模型,目的是模拟外设的工作特性(物理数学特性),比如电机模型、空调模型等等。仿真软件中的模型,功能也是这个,所以,它们属于一回事,在一定条件下,可以直接移植。
仿真技术属于前期工作,更偏向于理论设计,不是本公号的重点,高校实验室研究得比较多,并且这个领域内已经有一些很牛的高手了,比如“思想”、“xiaoming”等,做得已经很好了。
仿真软件
Cruise和Carsim是比较经典的两个软件。
Cruise是数据流模型,长处在于控制系统分析优化,偏电,模型库很丰富,混动、燃料电池的,都不在话下,但是结论不够直观,需要进一步分析研究!
Carsim是结构模型,偏机械,长处在于直观的动画显示,很酷,但模型库不如Cruise高级、丰富。
如果是做混合动力控制优化仿真,那肯定是用Cruise,如果是做EPS、ADAS测试,需要用直观的动画展示测试结果的,那肯定是用Carsim了。
离线仿真? 在线仿真?
“离线”、“在线”,是软件学科的术语。 比如在互联网领域,系统上线,部署到云上之后进行的测试,就叫“在线测试”,在实验室里的单机上所做的测试,就是“离线测试”,它们之间最主要的区别就是: 有没有被正式使用。
当这个概念被移植到汽车领域,特别是HIL领域之后,确实容易混淆,我们可以通过下面的三个图片,来感受一下这种“模糊感”。 图1是NI的官方资料,图2是技术社区的帖子,图3是公开文献。

师子一号为您提炼的结论,是普遍适用的,我们可以继续通过“ 有没有被正式使用 ”,来判定我们到底是离线测试还是在线测试。
一般而言,HIL都是“在线测试”,纯软件仿真都是“离线测试”,因为在HIL中,被测对象是“永远运行的”,和真车一样,而在软件仿真中,测试跑一会儿就会停下来的,是“工况测试”,不是“永远运行”。
有实物也不一定是“在线”,因为“工况测试”也是可以有真实控制器参与的,这也是EPS、ADAS测试的常用方法~
比较绕,不纠结也罢,只是在碰到资料里这样写的时候,我们可以按照这个原则,弄明白它。
02、纯软件仿真的运行机理
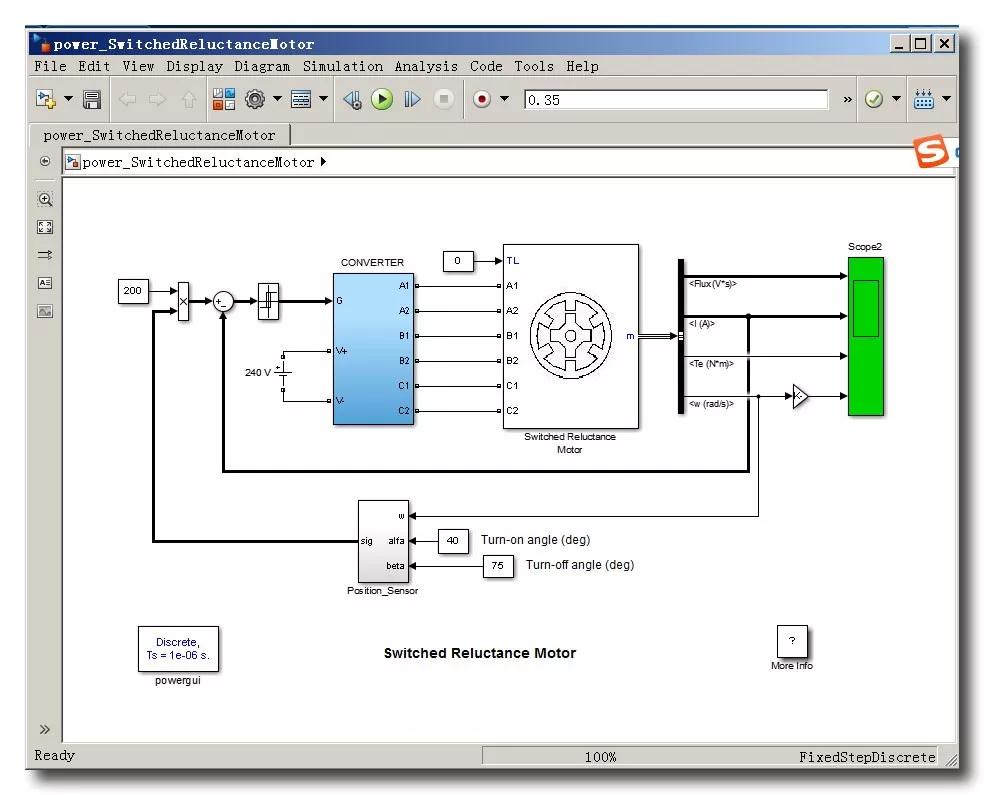
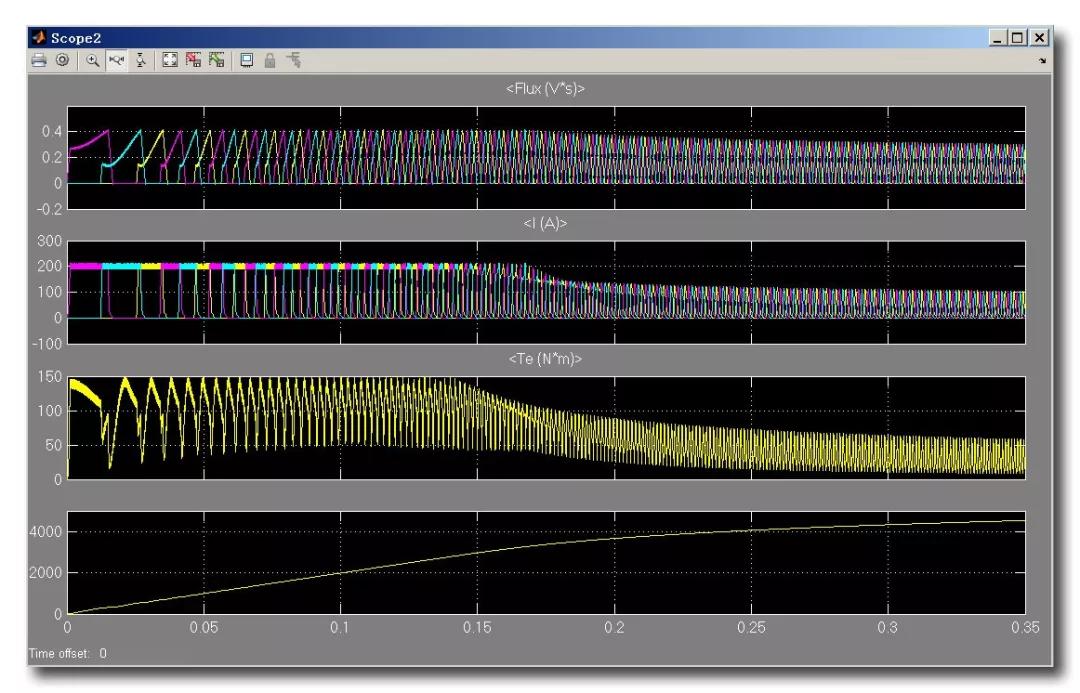
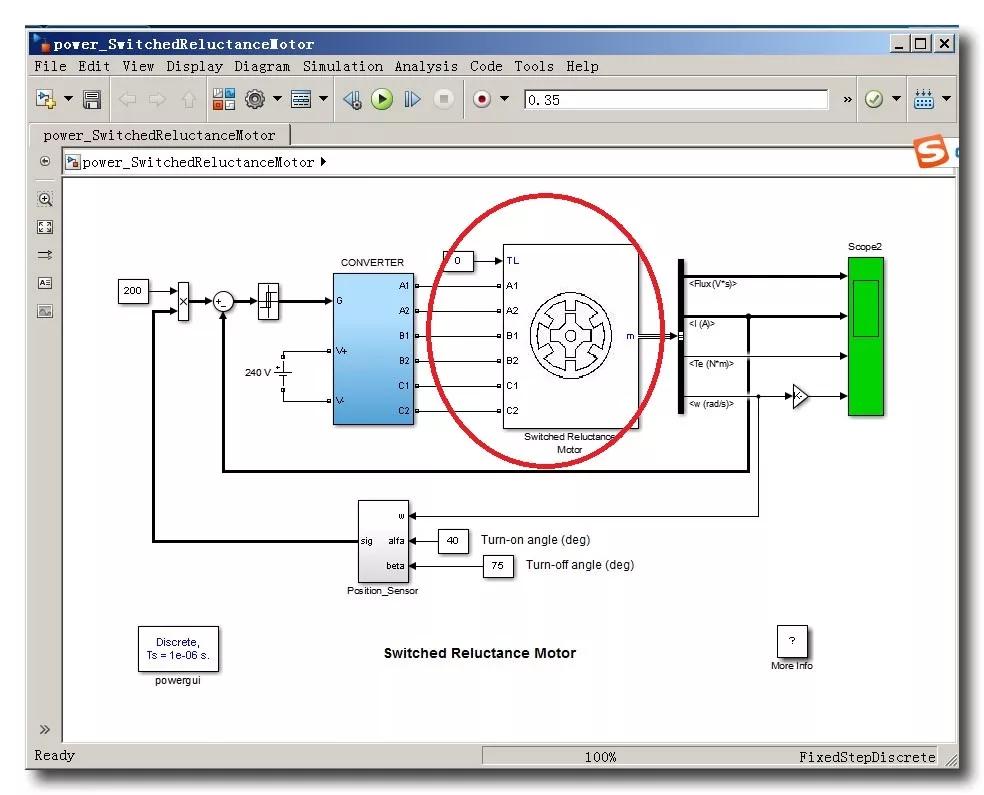
上图是Simulink自带的仿真模型,以及它所绘制的图像。这个模型是离散的,采样精度是1us,运行时长为0.35s,也就是说,运行35万步之后,它就自己停了。
离线仿真必须设定停止条件,这是它和HIL的一个非常重要的区别,HIL测试时,一般没有终止条件,可以一直跑下去。因为HIL只是从仿真模型中提取出了一部分,并不包含反馈(反馈部分是通过CAN、硬线等信号传输的)。
03、结论
本讲,我们讲述了EPS的HIL测试在模型方面的一些概念,并计划借助Carsim来完成相关的测试工作,接下来,我们将继续朝着这个方向,一点点予以剖析和演示。
下面这个动画是Carsim导出的,展示的是在分离摩擦系数的路面(比如一半是冰面,一半是水泥)上,有无ABS时,车辆的运动轨迹对比,是纯软件的仿真结果。
我们做HIL的目的,就是要把真实的ABS(或者EPS)嵌入到这个系统,使其变成软硬件结合的硬件在环测试,并得出类似的测试效果来。更进一步地,我们还可以调整EPS控制器的内部参数,并观察其在这样的场景中的效果和区别,从而为控制器的系统级开发提供强有力的支持!







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
