




 广告
广告





















































【分析】用AVL CRUISE分析纯电动汽车动力性的操作指导
2020-02-23 21:41:19· 来源:旺材动力总成

建模分析流程在Cruise软件中建立仿真模型时,需要按照一定的流程图逐步建立整车模型。这样可以避免不必要的错误,防止数据的遗漏,保证仿真过程的顺利进行。在建
建模分析流程
在Cruise软件中建立仿真模型时,需要按照一定的流程图逐步建立整车模型。这样可以避免不必要的错误,防止数据的遗漏,保证仿真过程的顺利进行。在建模过程中,推荐的仿真流程图如1所示。
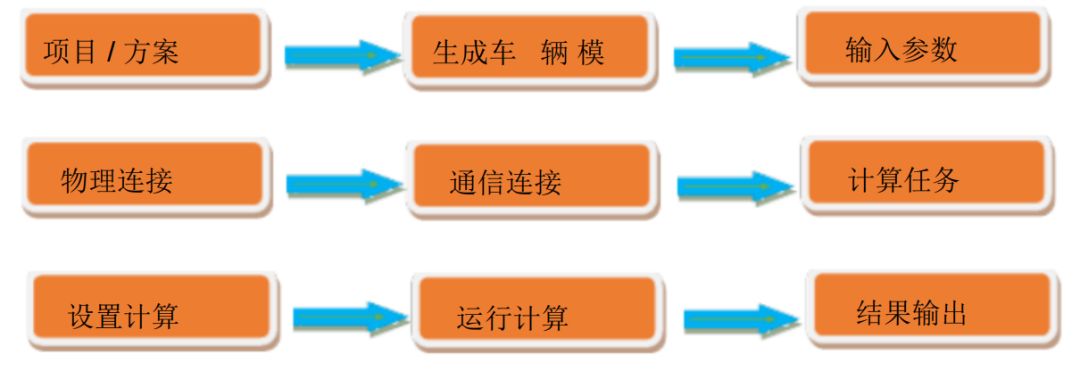
图1 AVL Cruise建模分析流程图
主要模块功能
Vehicle模块Vehicle 模块是每个模型的基本组件,在该组件中可以定义车辆的基本尺寸、重量等参数。每个模型只能有一个Vehicle模块。该组件可以计算得到车轮动态载荷、空气阻力、滚动阻力、坡度阻力、加速阻力以及车辆总阻力。Vehicle模块参数输入主界面如图2所示。
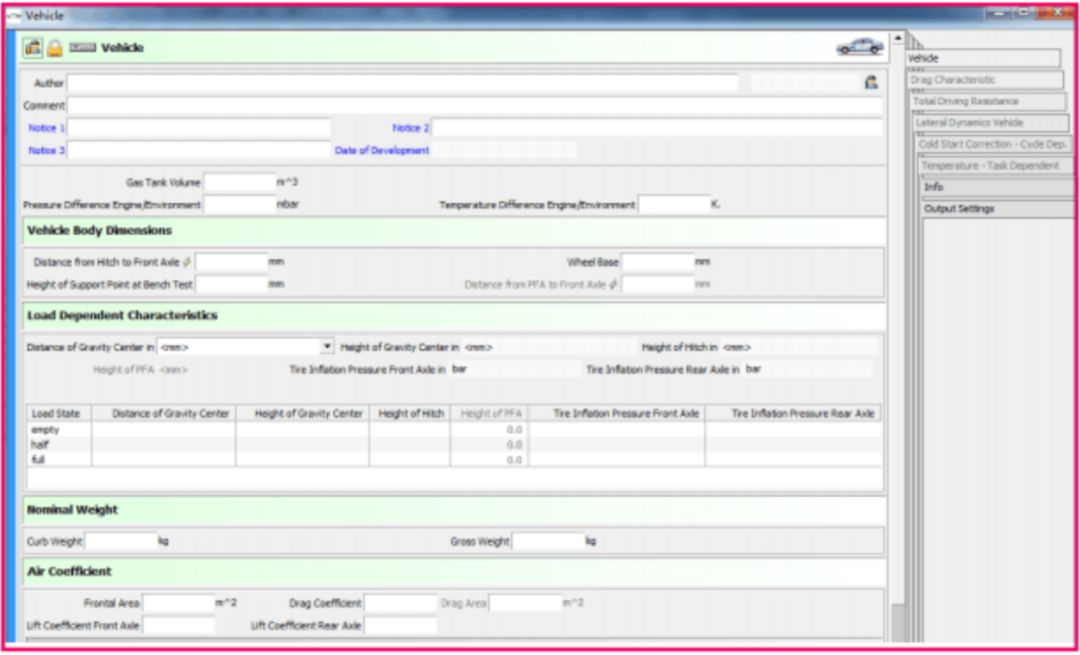
图2 Vehicle模块参数输入主界面
在Vehicle模块中,需要输入的主要参数有:油箱容积、较接点到前轴的距离、轴距、台架试验台的固定点到地面的距离、重心到前轴的距离、重心高度、前后轮胎压、整备质量、满载质量、迎风面积、空气阻力系数以及前后轴升力系数等。
Engine模块Engine模块是通过特性曲线和Map图来建模的。理论上,要求使用在试验台架测定的燃油消耗和废气排放图。这些Map图是在发动机的某一工作温度时测定的。而在冷起动模拟时,可以采用温度和摩损模块来考虑燃油消耗和废气排放的增加。
如果再输入增压器的一些附加特性(增压器工作压力,进气温度等),就可以研究增压器对全负荷加速时间的影响。
发动机的数据可以根据新发动机的排量进行相应地缩放。所有与发动机排量相关的数据都要乘以发动机的排量比。Engine模块的输入参数主界面如图3所示。
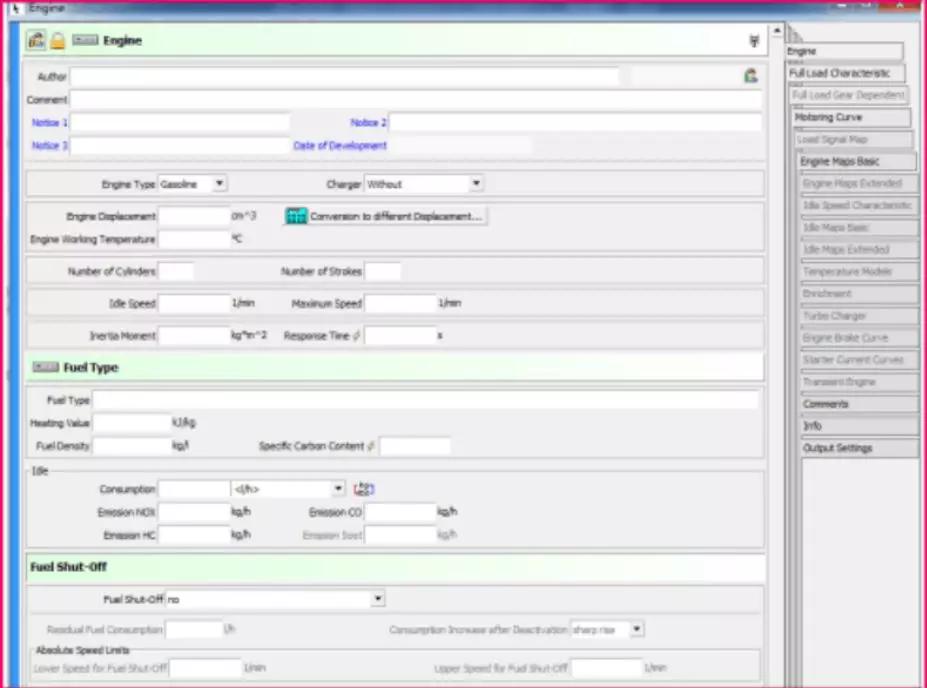
图3 Engine模块参数输入主界面
clutch 模块
Clutch 模块用于模拟手动变速箱的摩擦式离合器模型,最大传递转矩是摩擦式离合器的主要性能。最大传递转矩可以通过输入的结构尺寸参数来计算,也可以直接输入。Clutch可以由Driver通过离合器踏板行程控制,或者由Clutch Control、Clutch Program来控制。Clutch模块的输入参数主界面如图4所示。
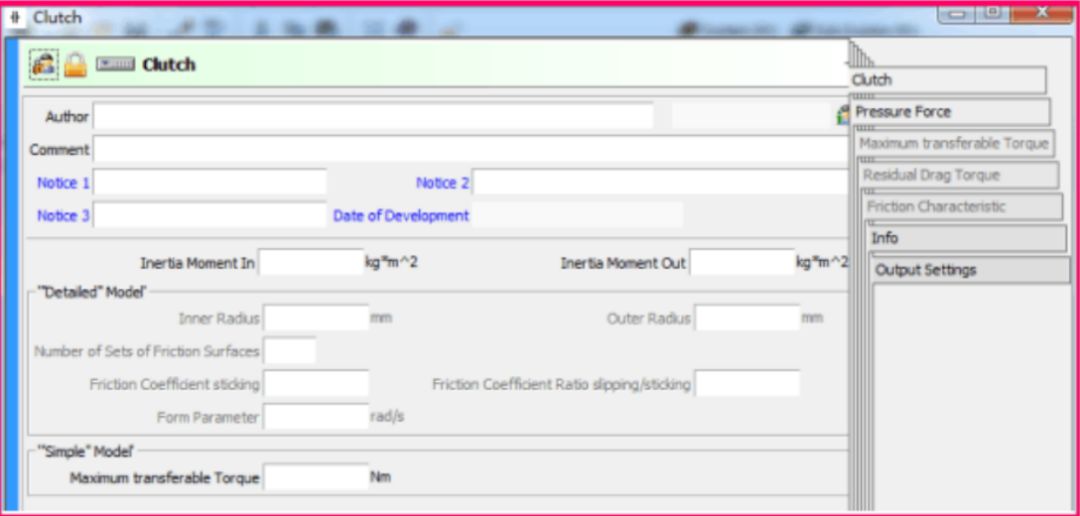
该模块需要输入的主要参数有:离合器输入、输出转动惯量、离合器所能传递的最大转矩、离合器摩擦片的内外工作半径、摩擦面数等。
Gear Box模块中,考虑了传动比、转动惯量和转矩损失等因素,将驱动端的输入转矩转换成动力输出端的输出转矩。Gear Box模块的输入参数主界面如图5所示。
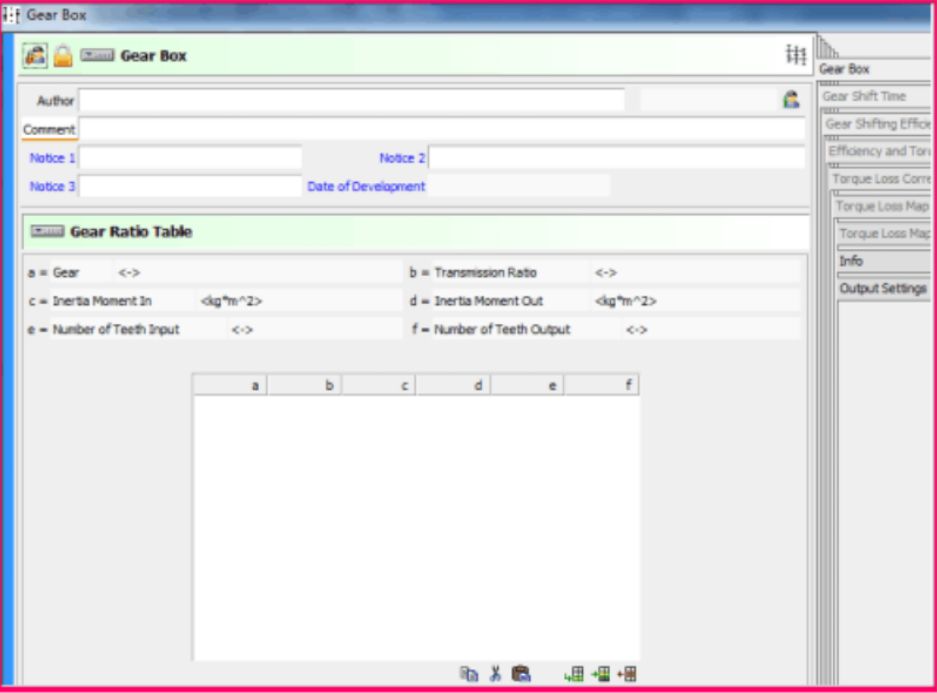
图5 Gear Box模块参数输入主界面
该模块需要输入的主要参数有:挡位数目、各个挡位的传动比、每一挡位的驱动输入端和动力输出端的转动惯量、每一挡位啮合齿轮齿数等。
Single Ratio Transmission模块
Single Ratio Transmission 模块用来模拟主减速器,与Gear Box模块类似,不同的是该部件只提供一个传动比。Single RatioTransmission 模块的输入参数主界面如图6所示。该模块需要输入的主要参数有:主减速比、驱动端和动力输出端的转动惯量等。
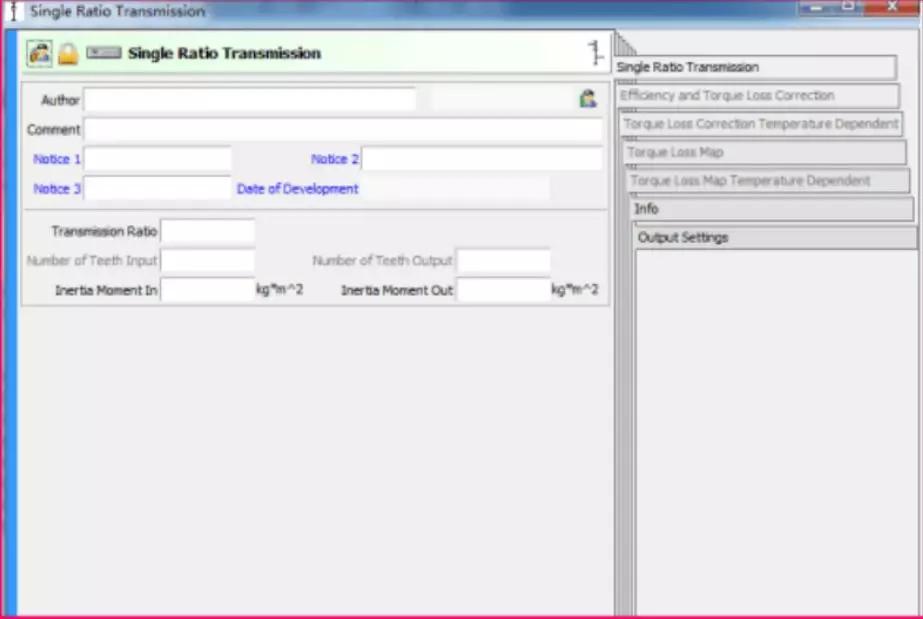
图6 Single Ratio Transmission模块参数输入主界面
Differential模块
Differential 模块用来模拟差速器。考虑了转动惯量,该部件可以把驱动端的输入转矩分成两个动力输出端的输出转矩,或者把两个动力输入端的输入转矩求和。另外,该部件还提供了差速锁。
Differential 模块的输入参数主界面如图7所示。
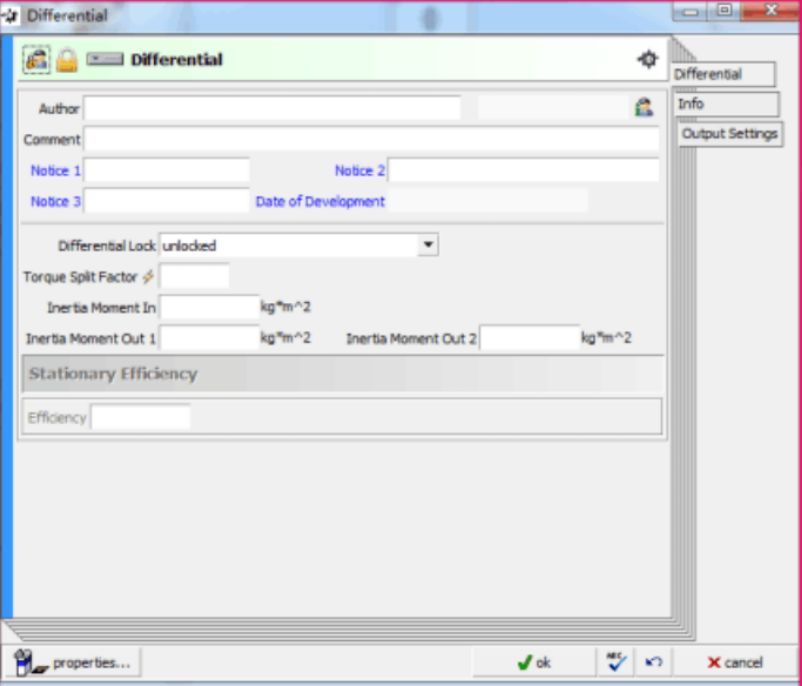
图7 Differential模块参数输入主界面
该模块需要输入的主要参数有:转矩分配系数、驱动端和动力输出端的转动惯量等。
Wheel/Tire模块Wheel/Tire 模块是车辆和道路之间的连接模块。该模块可以考虑轮胎滑移。并且有Michelin滚动阻力矩模型,可以考虑众多参数对车轮阻力的影响。Wheel模块输入参数主界面如图8所示。
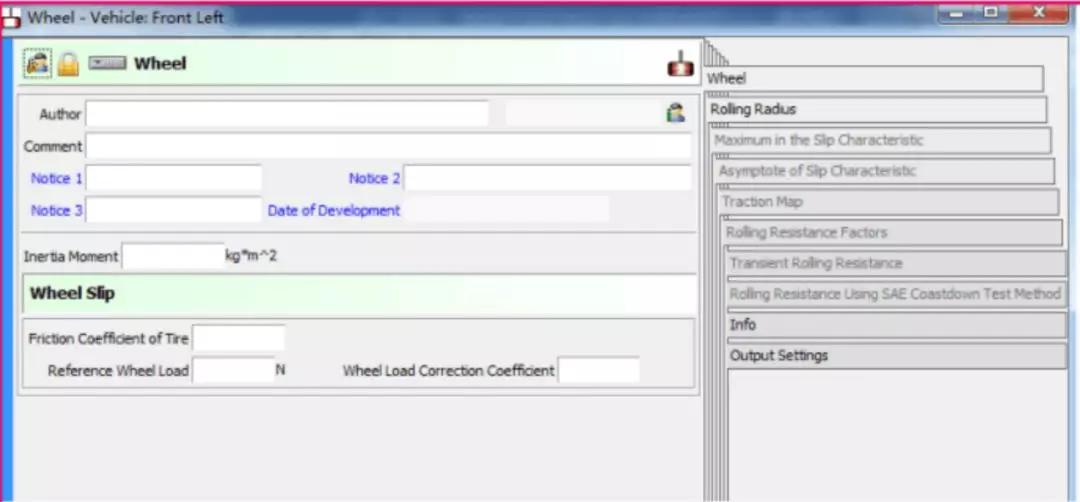
图8 Wheel/Tire模块参数输入主界面
Cockpit 模块
Cockpit 模块用来模拟驾驶室。驾驶室用来链接车辆和驾驶员。
并且可以确定哪些信息与数据可以被驾驶员调用以及驾驶员的输出对车辆的影响。Cockpit 模块输入参数主界面如图9所示。
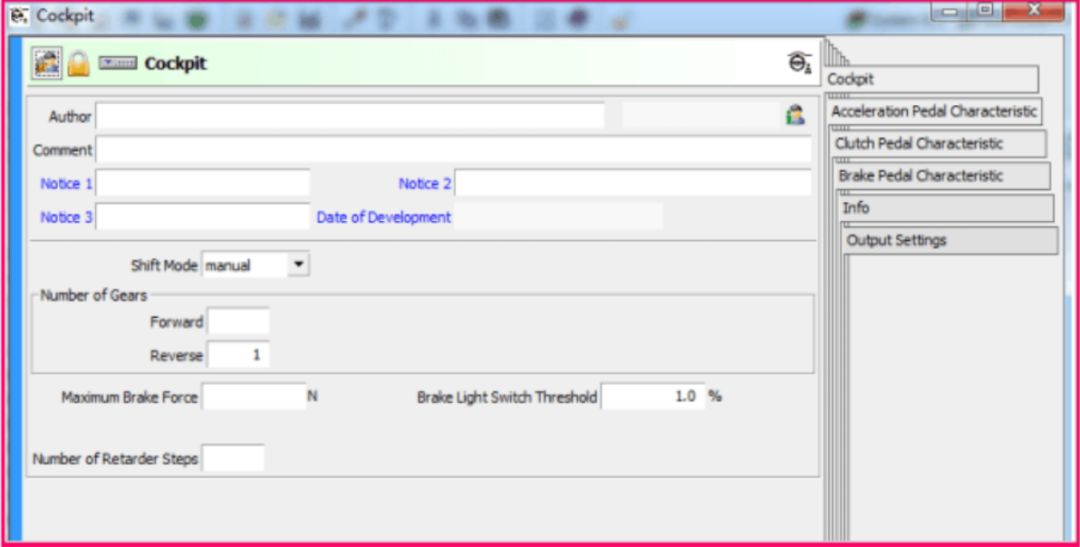
图9Cockpit 模块参数输入主界面
该模块需要输入的主要参数有:前进挡数、倒挡数、最大制动力等。
AVL Cruise计算任务的设定计算任务的组织管理是通过文件夹的方式来实现的。对于每一项任务都包括以下文件夹:计算任务特性设置文件夹、计算任务文件夹、Course(道路)设置文件夹、Driver(驾驶员)设置文件夹。
对于不同的计算任务文件夹,在不需要计算时,可以关闭来节省计算时间。
大部分计算任务可以设置为道路模式或者底盘测功机模式。这两者的主要区别在于车辆的阻力不同。在底盘测功机模式中,需要定义飞轮的转动惯量。另外,在考虑和不考虑轮胎滑移的计算任务中,可计算任务特性设置文件夹该文件夹主要是设置计算精度、仿真步长等参数,一般取默认值。
推荐的默认设置如下:
Calculation Accuracy:
normal(possibly high)Correction Threshold:high Simulation Max.Simulation
Time Step:0.05s
Output after every 1 Simulation Step(s)
Time Interval :0.5s
Velocity Interval :O.5km/h
计算任务文件夹该文件夹用于设置计算任务。Cruise软件内置了多种基于汽车工程应用的计算任务。包括的任务如下:
循环行驶工况(Cycle Run)该任务用来计算整车在标准循环工况(如UDC NEDC等)中的燃油油耗和排放情况。Cruise内置了各个国家不同驾驶需求的标准路谱,用户可以方便地使用,另外用户也可以根据实际道路谱修正道路谱。
爬坡性能分析(Climbing Performance)该任务属于静态计算,用于计算各个挡位,发动机整个转速范围内的最大爬坡度。另外,也可以计算在一定转速或者一定车速的最大爬坡度。
稳态行驶性能分析(Constant Drive)该任务也是静态计算,用于计算各个挡位的等速燃油消耗和排放。其中的最高车速子任务可以计算实际达到的最高车速和理论最高车速。优化是通过改变主减速器速比来进行的,结果中可以得到主减速比优化系数。
全负荷加速性能(Full Load Acceleration)在该任务下有三个子任务:
各挡最大加速性能计算(Maximum Acceleration in allGears):该子任务也是静态计算,可以计算得到所有车速和挡位下的最大加速度。
原地起步连续换挡加速性能(Shifting Gears fromStandstill):该任务可以计算车辆原地起步连续换挡加速性能。
超车加速性能(Elasticity):该任务用于计算车辆的超车加速性能。
最大牵引力计算(Maximum Traction Force)该任务也是静态计算,可以得到所有车速和挡位下的发动机最大牵引力。同时在结果中,可以得到驱动力-行驶阻力平衡图和功率平衡图。
巡航行驶工况(Cruising)该任务与循环工况任务相似,可用于计算客户自己定义的已知两城市间的总体燃油消耗和排放。
制动/滑行/反拖(Brake/Coast/Thrust)通过设置是否换挡和是否有制动力,该任务可用于分析车辆的制动、滑行以及反拖性能。
Course(道路)设置文件夹Course部件用于描述计算任务的环境条件。为了描述外界环境,的大气压力、大气密度以及温度等都是必需的。所需输入参数有:
可以与时间或距离相关的一些输入参数:
大气温度湿度行驶方向上的风速过程信号,可以定义为车辆模型的外部输入信号
其他的与距离相关的输入参数还有:
大气密度或压力
道路摩擦系数
道路高度变化
路段车速限制
图10所示为Course文件夹设置窗口:
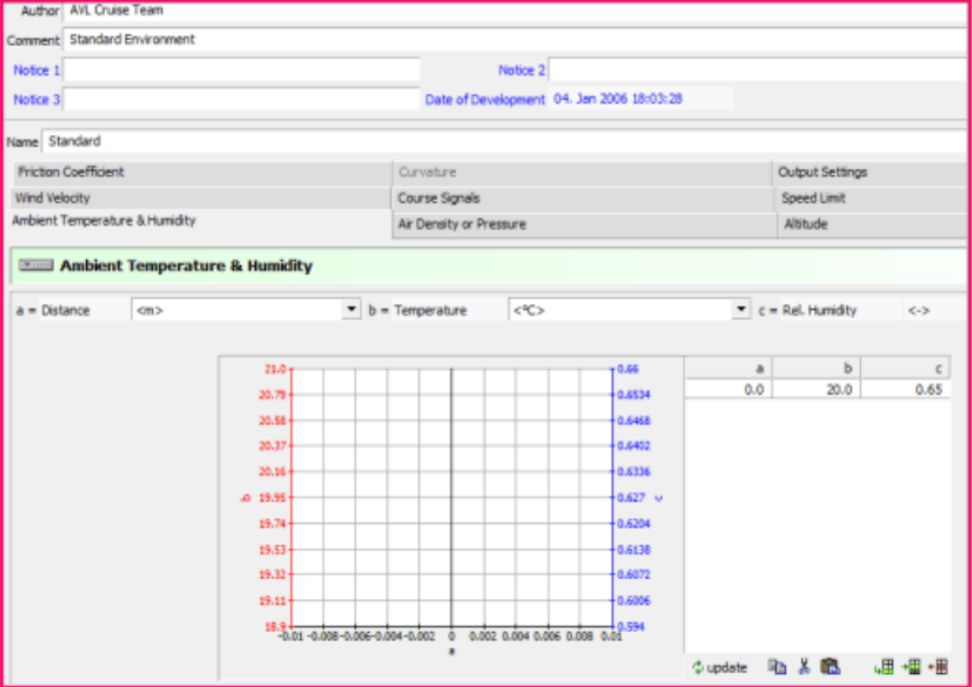
图10 Course设置窗口
Driver(驾驶员)设置文件夹驾驶员模块用来实现驾驶员的操作。图11为Driver设置窗口。
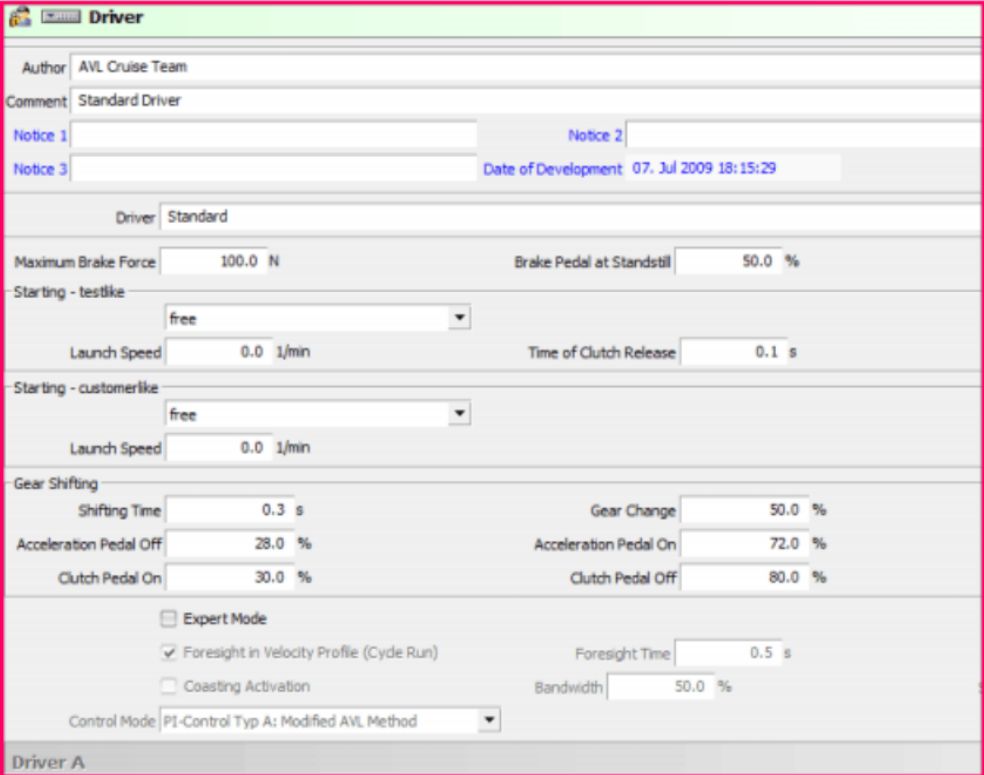
图11Driver设置窗口
Cruise中内置了多种标准的驾驶员操作数据,方便用户选择。
在行驶循环测试中得到的车辆的动力性和燃油经济性,很大程度上受到驾驶员操作特征的影响。驾驶员的操纵特征、驾驶员的操纵习惯特点是驾驶员操纵车辆的决策基础。Cruise的模块化理念使得对于同一辆车,可以采用不同的驾驶员来执行大量不同的任务。反过来,同一类型的驾驶员模块也可以用于不同的车辆进行燃油经济性能和动力性能的测试。
汽车零部件模型建立
本次计算是以某4×2后驱车为基础,进行零部件建模,整车模型搭建、计算任务设定、计算结果处理等,最终评价匹配结果,并对其进行优化,最终满足性能要求。
软件启动开始→所有程序→AVL Cruise 2014,打开AVL Cruise2014。
默认进入User(用户)模式,侧是Project导航窗口,里面包括软件自带的各种案例模型,右侧是project 模型的详细信息,如图12所示。
图12 AVL Cruise 2014欢迎界面
Project创建在AVL Cruise2014的安装目录D:\Program FilesAVLICRUISElw2014\projects下建立纯电动汽车分析文件夹,点击进去之后再建立文件夹Electric_4×2_Rear-Drive,如图13所示。
图13建立纯电动汽车分析文件夹
接下来将会在Cruise主界面左侧的Project树中看到纯电动汽车分析的文件夹,下面有一个名为Electric_4×2_Rear-Drive的Project文件,右键点击该project,选择new→version,创建了一个Electric_4×2_Rear-Drive的算例,如图14所示。
图14建立Electric_4×2_Rear-Drive算例
右键点击导航窗口中project,选择“load”,进入Desk建模主界面,如图15所示。
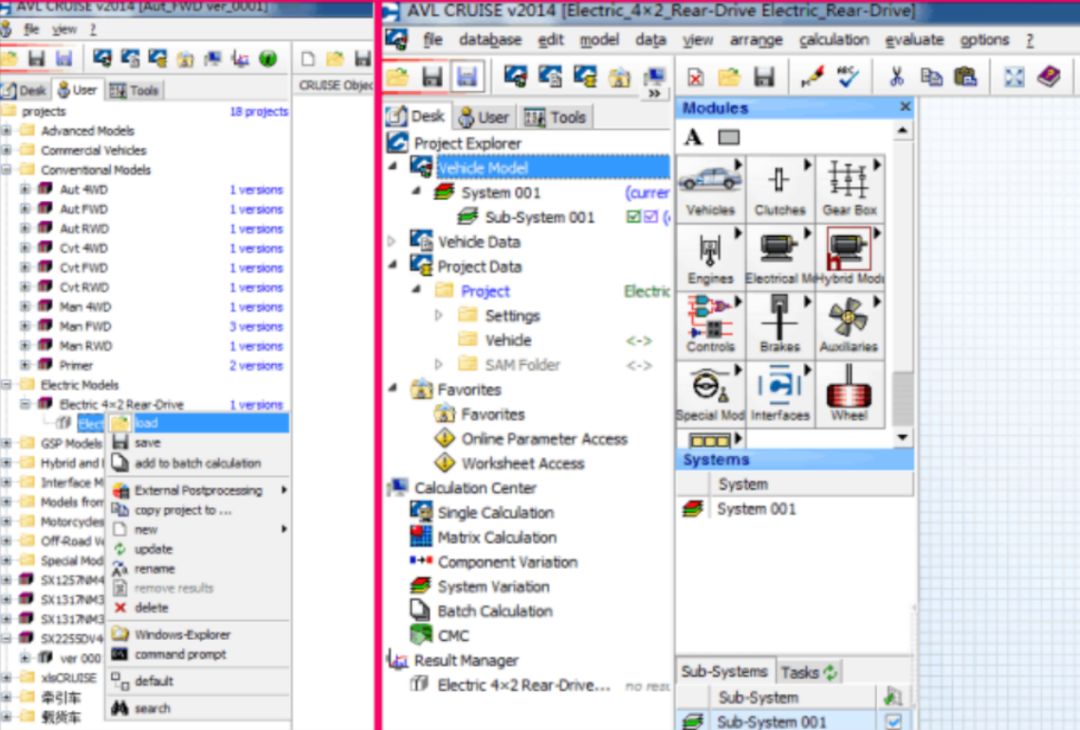
图15 进入Desk 建模界面
下面将逐一建立纯电动汽车的各个系统及部件。
Vehicle整车模型首先确保当前编辑状态处于“Vehicle Model”下,点击“bdules”模块下的Vehicles,并将其拖曳到建模主窗口,如图17所示。
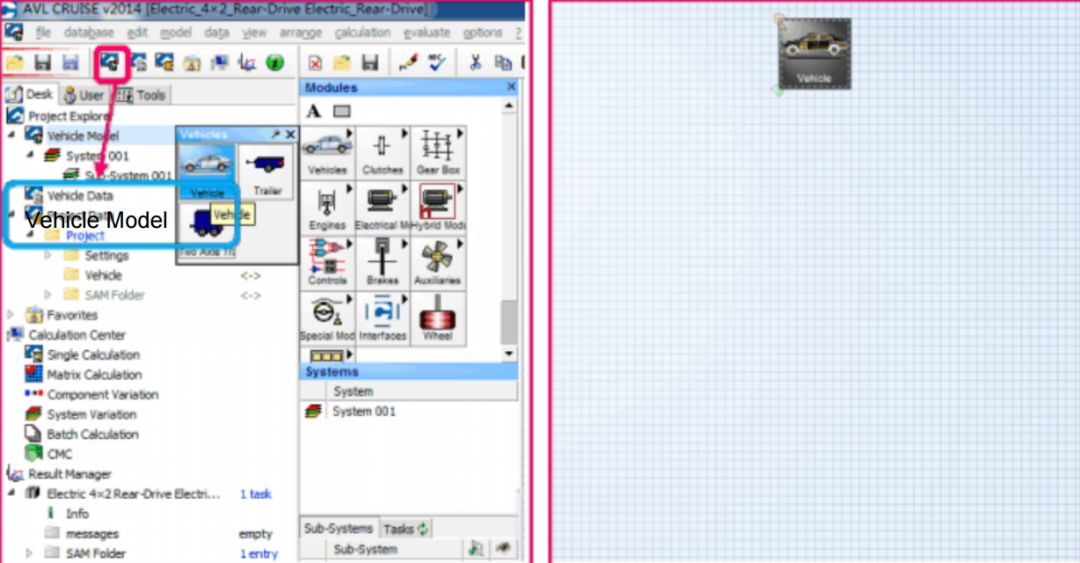
图16 建立Vehicle模型
车辆模块包括汽车公称尺寸、质量、空气阻力系数等一些基本的数据,是传动系模型重要的组成部分。车辆模块需要的参数主要包括整车整备质量、最大总质量、行驶阻力、车辆重心位置、车辆动载荷、迎风面积等,车辆模块中主要参数如图17所示。
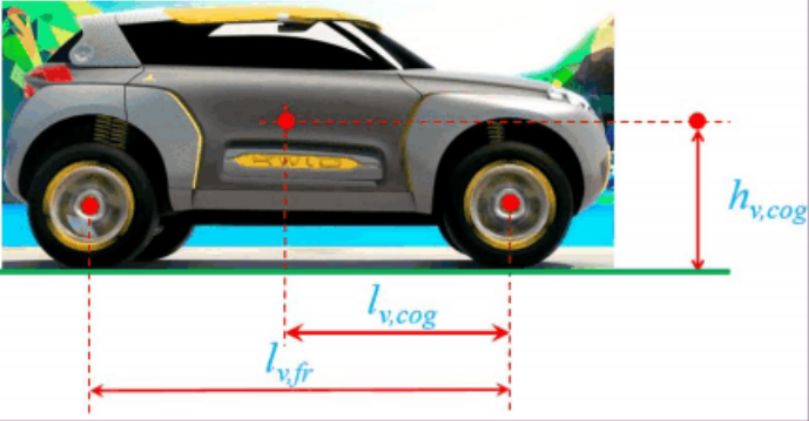
图17 车辆模块尺寸
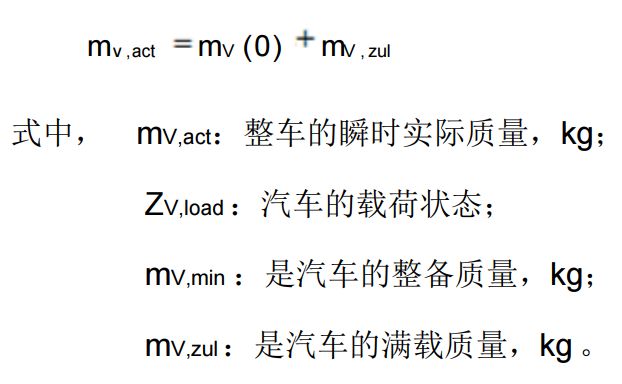
其中hv.cog-车辆重心高度;lv.cog一重心到前轴高度;lvir一轴距;hv,vcp-铰接点到地面的距离;lv,vcp-铰接点到前轴的距1、整车质量汽车的质量是与汽车装载状态有关的。不同装载情况下,汽车的质量是不同的,可表示为:
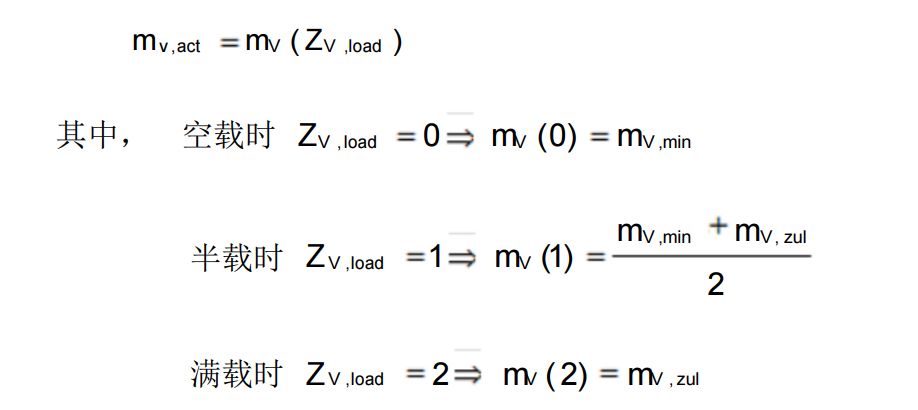
如果不是上面这三种状态,则可以按下式计算汽车的瞬时质量:
阻力
A)从物理模块得汽车所受阻力是由空气阻力,滚动阻力,加速阻力和坡度阻力几部分组成的。其中,滚动阻力是对所有车轮逐个进行计算得到的。
空气阻力
通过相对推力kv.add.trac和kVadd.push来确定额外的牵引力或者推力。它们与汽车的质量有关,其大小可以通过适用于特殊计算任务(如,最大牵引力)的方程解算器来确定。
B)从参考汽车的阻力函数得首先需输入CA,CB和CC三个参数。通过这些参数和式(2-8)可以得出行驶阻力函数,为:
C)从参考汽车的阻力表得行驶阻力曲线是由力与车速关系得到的。从这个表中可以得出阻力函数中的常数部分和比例部分。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
