




 广告
广告





















































无人驾驶感知技术介绍
2020-03-17 22:52:07· 来源:易控智驾

五、V2X网联通信技术
近年来,随着物联网、大数据、“互联网+”等新技术的兴起,智能交通系统(ITS,Intelligent Transport System)在智能网联、车联网方面也有了长足发展。作为 ITS 的重要载体,无人驾驶汽车不再是孤立的个体,仅关注车辆与周边道路环境已无法满足安全、高效、节能、行驶的更高要求,需要进一步实现车辆与外部节点间的信息共享和控制协同,V2X 网联通信技术将成为未来无人驾驶发展的重要技术支撑。
V2X 网联是基于物联网,运用 D2D(Device to Device,终端直通)以及信息通信等技术实现车辆与外界互联的无线通信技术。欧美 和日本较早展开 V2X 网联技术研究,美国在 2010 年颁布了以 IEEE802.11P 作为底层通信协议和 IEEE 1609 系列规范作为高层通信协议的 V2X 网联通信标准。与之相比,V2X 在我国发展相对较晚,2015 年才开始相应研究;2016 年国家无线电委员会确定了我国的 V2X 专用频谱;同年 6 月,V2X 技术测试作为第一家“国家智能网联汽车试点示范区”及封闭测试区的重点布置场景之一;2017 年 9 月 19 日, 我国首部 V2X 应用层团体标准《合作式智能交通系统车用通信系统应用层及应用数据交互标准》正式发布。
无人驾驶对V2X 网联通信提出了以下几点技术要求:网络接入时间短、传输时延低、传输可靠性高、干扰性低、信息安全性高、频谱可再利用。另外,还需要对海量数据进行分析与处理,这就要求 V2X 技术可以合理借助各类感知传感器,并从获取的数据中探索规律进行有效表示。
V2X 技术的实现一般基于 RFID、拍照设备、车载传感器等硬件平台。V2X 网联通信产业分为 DSRC ( Dedicated Short Range Communication,专用短程协议)和 LTE-V2X 两个标准和产业阵营:DSRC 的设备组成包括车载单元(OBU,On Board Unit)、路边单元(RSU,Road Side Unit)、控制中心等。1999 年,美国联邦通信委员会专门分配了无线频率 5.9GHz 频段内 75MHz 频谱,作为智能交通系统中 DSRC 的专属频谱。作为以 IEEE802.11p 为基础的标准,DSRC 可以在数百米的特定区域内实现对高速移动目标的识别和双向通信。DSRC 的优势在于技术成熟可靠,能够保证低时延和安全可靠性,因此依然是当下市场主流的 V2X 标准。
DSRC 能够支持的最高车速为 200km/h,数据传输速率一般为12Mbps,反应时间为 100ms 以内,低时延达到 20ms。另外也存在一些不足,包括覆盖范围小、传输速率低、易受到建筑物遮挡、处理大 量数据较慢、建设成本较高等。目前,DSRC 在不停车收费(ETC 系统)、车队管理、出入控制、信息服务等领域已经有广泛应用。
LTE-V2X 基于现有蜂窝移动通信支持(3G/4G),拥有自主知识产权。相比 DSRC,LTE-V2X 的起步较晚:2015 年初,国际标准化组织 3GPP(3rd Generation Partnership Project,第三代合作伙伴计划) 启动了 LTE-V2X 的业务需求研究工作,明确了对 LTE-V2X 在时延、覆盖范围、可靠性、安全性等方面的要求;2016 年 9 月完成了 LTE-V2X 第一阶段标准,优先实现了基于 D2D 的 V2V 标准化。
中国通信标准化协会(CCSA)已经针对 LTE-V2X 先后开展了需求与系统结构、无线空口技术和频谱需求等项目的研究工作,工信部、发改委和科技部等政府部门和高通、华为等公司也在大力推动 LTE-V2X 技术的产业化发展。
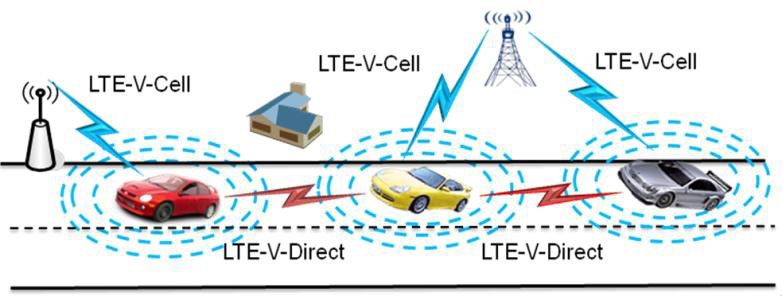
LTE-V2X 技术按照通信方式分为集中式(LTE-V-Cell)和分布式(LTE-V-Direct)两种,如图 2-6 所示。LTE-V-Cell 以基站为分布中心,需要现有蜂窝网络的支持,具有带宽大、覆盖广的通信特点,能 免实现远距离通信;LTE-V-Direct 独立于蜂窝网络,是一种车辆与周边环境节点直接通信的技术,具有低时延、高可靠的优势。
目前,LTE-V2X 仍在研发测试阶段,但是已形成可运营的完整网络体系,能够在高频段(5.9GHz)、高车速(250km/h)、高车流量的环境下提供可靠的通信能力,并且在大容量、低时延、抗干扰性以及可管理性等方面更为成熟。LTE-V2X 具有三点优势:1)部署成本低, 可以重复利用既有蜂窝网络的基础设施;2)覆盖范围广,可扩展至数百米以上的非视距范围;3)数据传输速率高,峰值上行 500Mbps、下行 1Gbps。对国内企业而言,采用 LTE-V2X 还有助于规避专利风险。
V2X 网联通信集成了 V2N、V2V、V2I 和 V2P 四类关健技术:1)V2N(Vehicle to Network,车-互联网),主要是通过网络将车辆连接到云服务器,能够使用云服务器上的娱乐、导航等功能;2)V2V(Vehicle to Vehicle,车-车),指不同车辆之间的信息互通;3)V2I(Vehicle to Infrastructure,车-基础设施),主要包括车辆与道路、交通灯、路障等基础设施之间的通信, 用于获取交通灯信号时序、路障位置等道路管理信息;4)V2P(Vehicle to Pedestrian,车-行人),指车辆与行人或非机动车之间的交互,主要是提供安全警告。
四类技术的感知范围不同,为无人驾驶提供的信息和能力也有所差异:
通过 V2N 技术,无人驾驶车辆可以提高收集数据的能力, 并且通过对这些数据进行模拟和调优,不断提升无人驾驶体验效果。V2N 还可提供实时路况、获取远程交通信息、发出交通事故警报等 , 从而减少拥堵、提高驾驶效率。
V2V 技术有助于无人驾驶车辆获取周边车辆运行信息,包括相对位置、行车环境等,为行车提供防碰撞警示提醒。V2V 还可为进一步缩短车辆之间的安全距离提供可靠信息。
V2I 为无人驾驶提供交通信号灯状态、交通管制信号等交通道路信息,为车辆选择加减速时机和改变行驶路线提供依据,进而控制道路整体通行速度,提高驾驶安全性。
V2P 技术通过向无人驾驶车辆提供周边行人状态信息,保证行人的安全,提高道路安全服务质量。



编辑推荐




最新资讯
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
-
博世发布突破性电解槽技术
2025-04-02 20:23
-
ESI 全新BM-Stamp软件在汽车行业冲压仿真精
2025-04-02 09:27
-
车辆软件测试工程师的工作内容---解读GBT德
2025-04-02 08:41
-
浅谈机动车检测行业合规经营与检验人员职业
2025-04-02 08:40
