




 广告
广告





















































新能源电驱系统标准解读与拓展:转速控制
2020-03-14 01:30:24· 来源:臭皮匠试验室

导语我们已经讨论过电动汽车动力总成中的转矩控制,根据静态特性与动态特性,分别对转矩控制精度和转矩响应时间进行分析,在GB/T18488中有一标准定义与之很像,
导语
我们已经讨论过电动汽车动力总成中的转矩控制,根据静态特性与动态特性,分别对转矩控制精度和转矩响应时间进行分析,在GB/T18488中有一标准定义与之很像,就是转速控制。转速控制影响了电动车的驾驶性与舒适性,它与转矩控制是怎么联系的呢?究竟怎么评估转速控制?如何测试?为什么要用转速控制呢?
带着这些问题,我们会结合相关标准从以下进行解读:
1. 转速控制相关指标
2. 转速控制相关测试
3. 转速控制方式与应用
1. 转速控制相关指标
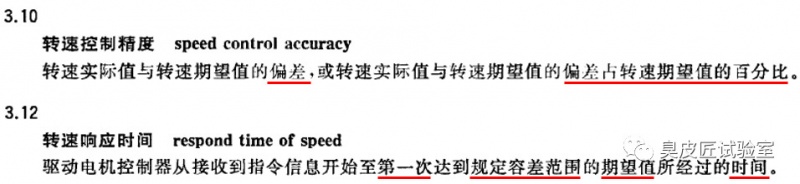
在《GB/T 18488.1-2015-电动汽车用电机及其控制器第1部分-技术条件》3.10和3.12中分别给出了转速控制的相关指标:
解读:
以一个典型响应为例,看一下转速控制的响应历程,找到响应的标准定义:
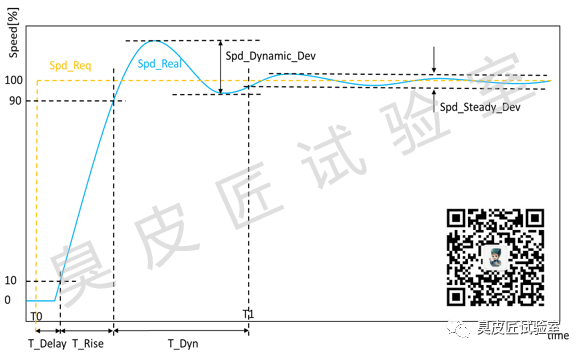
其中,Spd_Req为需求转速,Spd_Real为实际转速,T0时刻系统接收到请求转速的指令信息,经过一段延迟时间T_Delay,实际转速达到需求转速的10%,再经过一定的上升时间T_Rise,实际转速达到需求转速的90%,转速再上升到最大值随后减小(其中,最大值与最小值之间是转速动态偏差Spd_Dynamic_Dev),就这样实际转速沿着需求转速上下波动,经过T_Dyn,到达T1时刻,实际转速的波动范围到达容差范围内,这个容差范围也就是转速静态误差Trq_Steady_Dev,根据静态误差,可以算出偏差的百分比,这个过程中转速响应时间为T_Delay+T_Rise+T_Dyn。
通常,对具有转速控制功能的驱动电机系统,转速控制精度应按转速范围分段定义,如<±20rpm@<2000rpm,<±1%@≥2000rpm。但是,对于转速响应时间,按照测试标准,通常在无负载的情况下定义(下一节会说明),驱动电机从静止上升至额定转速的响应时间不高于100ms,但应根据实际整车功能设计,提出更好的带负载测试的标准要求。
2. 转速控制相关测试
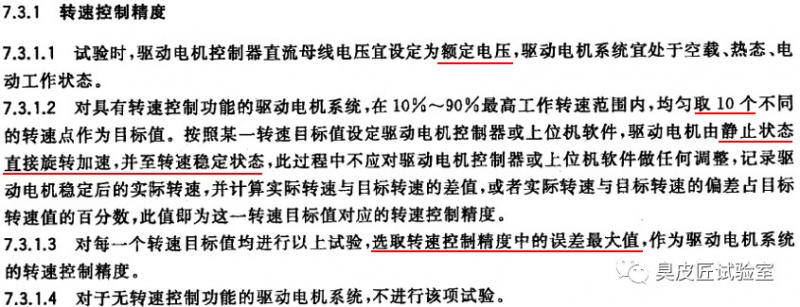
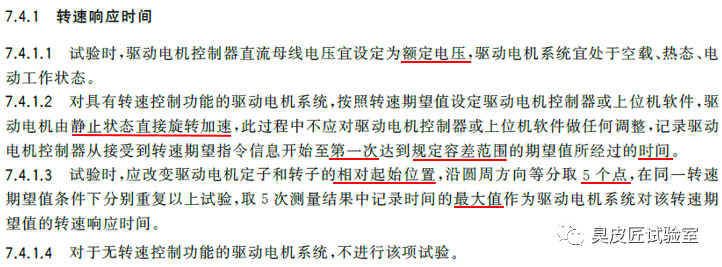
《GB/T 18488.2-2015-电动汽车用电机及其控制器第2部分-实验方法》7.3.1和7.4.1 中分别具体地写明了转速控制精度与转速响应时间测试的方法:
解读:
重点已经标出,测试标准中设定的条件都是在空载的情况下,如果转速控制器只在这种情况下进行参数校正,不考虑带负载的情况,显然是不充分的。转速控制是电机控制必有的功能,不过现阶段极少使用,还有待开发利用,整车应根据转速控制功能开启的不同场景,进行严格定义,考虑不同电压、电流、转速、温度下更完善的测试计划。
3. 转速控制方式与应用
在之前的"转矩控制"文章中,已经对基于矢量控制的转矩控制框图进行过介绍,在这个框图的基础上,我们再加上转速控制环:
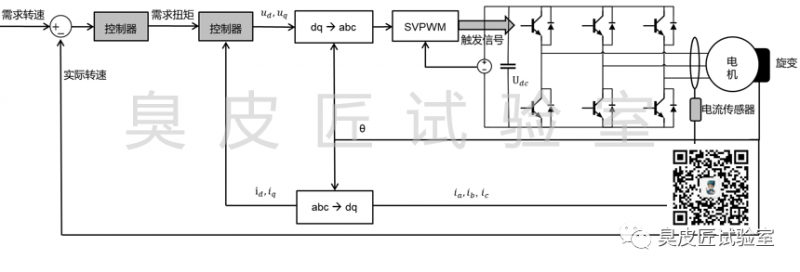
可以看出,转矩控制其实是转速控制的内环,需求转速与实际电机转速做比较,转速差给转速控制器,得到需求扭矩,进入扭矩控制环,对电机进行控制,实际转速通过旋变得到,形成转速控制闭环。显而易见,由于转速环相对于扭矩环更大一些,速度环同样是通过扭矩控制来实现,因此响应时间也会较长一些。
通常转速控制器为PI控制器,控制器参数需要根据转速的控制精度与响应时间进行校正,不考虑内环的影响,这个转速控制器的设计决定了转速控制的性能。
在纯电动车上,考虑到电机特性和单挡减速器的应用,较扭矩控制而言,转速控制应用较少;但对于多档位的混动车,控制目标不仅仅是要实现多大的扭矩,而且要实现某特定的同步转速,此时就要进入速度环,根据换挡策略实现换挡。
同时,在某些特定情形下,这个功能的可玩性还是有的,如定速巡航,在高速运行区间计算整车所需的扭矩范围,针对这个负扭矩,对转速控制器进行调教;如打滑控制,在冰面或者雨后路面,MCU结合ESP相关信号,做出最优的转速控制策略,防止失速;如上下坡,通过转速控制限速等,可以集成很多整车控制器的功能。
4. 结束语
转矩控制是转速控制的一环,影响转矩控制的因素同样也影响着转速控制。目前大部分纯电动车对转速控制功能很少使用,也没有严格要求,但是笔者认为这个功能需求在电动车不断发展的时代会不断强化,在扭矩控制参数设定好的基础上,针对不用的应用场景对转速控制器进行参数调校,提高驾驶的舒适性与操控性。
我们已经讨论过电动汽车动力总成中的转矩控制,根据静态特性与动态特性,分别对转矩控制精度和转矩响应时间进行分析,在GB/T18488中有一标准定义与之很像,就是转速控制。转速控制影响了电动车的驾驶性与舒适性,它与转矩控制是怎么联系的呢?究竟怎么评估转速控制?如何测试?为什么要用转速控制呢?
带着这些问题,我们会结合相关标准从以下进行解读:
1. 转速控制相关指标
2. 转速控制相关测试
3. 转速控制方式与应用
1. 转速控制相关指标
在《GB/T 18488.1-2015-电动汽车用电机及其控制器第1部分-技术条件》3.10和3.12中分别给出了转速控制的相关指标:
解读:
以一个典型响应为例,看一下转速控制的响应历程,找到响应的标准定义:
其中,Spd_Req为需求转速,Spd_Real为实际转速,T0时刻系统接收到请求转速的指令信息,经过一段延迟时间T_Delay,实际转速达到需求转速的10%,再经过一定的上升时间T_Rise,实际转速达到需求转速的90%,转速再上升到最大值随后减小(其中,最大值与最小值之间是转速动态偏差Spd_Dynamic_Dev),就这样实际转速沿着需求转速上下波动,经过T_Dyn,到达T1时刻,实际转速的波动范围到达容差范围内,这个容差范围也就是转速静态误差Trq_Steady_Dev,根据静态误差,可以算出偏差的百分比,这个过程中转速响应时间为T_Delay+T_Rise+T_Dyn。
通常,对具有转速控制功能的驱动电机系统,转速控制精度应按转速范围分段定义,如<±20rpm@<2000rpm,<±1%@≥2000rpm。但是,对于转速响应时间,按照测试标准,通常在无负载的情况下定义(下一节会说明),驱动电机从静止上升至额定转速的响应时间不高于100ms,但应根据实际整车功能设计,提出更好的带负载测试的标准要求。
2. 转速控制相关测试
《GB/T 18488.2-2015-电动汽车用电机及其控制器第2部分-实验方法》7.3.1和7.4.1 中分别具体地写明了转速控制精度与转速响应时间测试的方法:
解读:
重点已经标出,测试标准中设定的条件都是在空载的情况下,如果转速控制器只在这种情况下进行参数校正,不考虑带负载的情况,显然是不充分的。转速控制是电机控制必有的功能,不过现阶段极少使用,还有待开发利用,整车应根据转速控制功能开启的不同场景,进行严格定义,考虑不同电压、电流、转速、温度下更完善的测试计划。
3. 转速控制方式与应用
在之前的"转矩控制"文章中,已经对基于矢量控制的转矩控制框图进行过介绍,在这个框图的基础上,我们再加上转速控制环:
可以看出,转矩控制其实是转速控制的内环,需求转速与实际电机转速做比较,转速差给转速控制器,得到需求扭矩,进入扭矩控制环,对电机进行控制,实际转速通过旋变得到,形成转速控制闭环。显而易见,由于转速环相对于扭矩环更大一些,速度环同样是通过扭矩控制来实现,因此响应时间也会较长一些。
通常转速控制器为PI控制器,控制器参数需要根据转速的控制精度与响应时间进行校正,不考虑内环的影响,这个转速控制器的设计决定了转速控制的性能。
在纯电动车上,考虑到电机特性和单挡减速器的应用,较扭矩控制而言,转速控制应用较少;但对于多档位的混动车,控制目标不仅仅是要实现多大的扭矩,而且要实现某特定的同步转速,此时就要进入速度环,根据换挡策略实现换挡。
同时,在某些特定情形下,这个功能的可玩性还是有的,如定速巡航,在高速运行区间计算整车所需的扭矩范围,针对这个负扭矩,对转速控制器进行调教;如打滑控制,在冰面或者雨后路面,MCU结合ESP相关信号,做出最优的转速控制策略,防止失速;如上下坡,通过转速控制限速等,可以集成很多整车控制器的功能。
4. 结束语
转矩控制是转速控制的一环,影响转矩控制的因素同样也影响着转速控制。目前大部分纯电动车对转速控制功能很少使用,也没有严格要求,但是笔者认为这个功能需求在电动车不断发展的时代会不断强化,在扭矩控制参数设定好的基础上,针对不用的应用场景对转速控制器进行参数调校,提高驾驶的舒适性与操控性。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
