




 广告
广告





















































随机路面输入的汽车平顺性仿真分析(二)
2020-03-28 18:38:07· 来源:数字化工业软件技术期 作者:许先锋

接前续】,前续参见:随机路面输入的汽车平顺性仿真分析(一)03、随机路面输入的平顺性评价由于人体的加权评价指标不能从多体动力学计算结果中直接得到,只有通
接前续】,前续参见:随机路面输入的汽车平顺性仿真分析(一)
03、随机路面输入的平顺性评价
由于人体的加权评价指标不能从多体动力学计算结果中直接得到,只有通过对计算结果进行数据处理后才能得到这些评价指标。基于人体平顺性评价方法,二次开发了汽车平顺性评价程序。将多体动力学计算结果输入该程序,可方便地得到人体各种平顺性评价指标。
在平顺性分析中,非悬挂质量、悬挂质量和人体的振动加速度的均方根值是平顺性评价的客观物理量。根据ISO2631“人承受全身振动的评价指南”要求,人体对不同振动方向、不同频段振动的敏感程度不同,人体的胸—腹系统在垂直振动4Hz~8Hz、水平1Hz~2Hz范围内会出现明显的共振,这是人体对振动最敏感的频率范围。平顺性分析对人体而言,根据人体在垂直方向和水平方向振动加速度(客观物理量),按照人体对振动反应的敏感程度不同(主观评价),分别对垂直方向和水平方向振动加速度的功率谱密度进行频率加权,用1/3倍频带中最大的加权加速度均方根值或总加权加速度均方根值来进行评价;对非悬挂质量(如车桥)和悬挂质量(如车身地板)采用其加速度均方根值来进行评价。
在本仿真模型中,对前后车桥、车身用加速度均方根值来进行评价;对人体用总加权加速度均方根值来进行评价,而总加权加速度均方根值包括汽车纵向、横向、垂向的加权加速度均方根值。(在本例中:X轴,汽车纵向,正向向后;Y轴,汽车垂向,正向向上;Z轴,汽车横向,正向向左)。
人体在X、Y、Z方向的加权加速度均方根值可由该轴向的振动加速度的自功率谱密度函数直接积分得到:

式中是人体在X、Y、Z方向的加权加速度均方根值,单位;是人体在X、Y、Z方向振动的加速度自功率谱密度函数,单位;是人体在X、Y、Z方向的频率加权函数。




在Y轴方向,
在X、Z方向,

从ISO2631“人承受全身振动的评价指南”提供的人体对振动反应的“疲劳——工效降低界限”的曲线图上可以看出,在同一暴露时间下,人体对振动水平方向最敏感的频率范围1Hz~2Hz比垂直方向的最敏感的频率范围4Hz~8Hz的允许值低1.4倍,也就是说人体对水平方向1Hz~2Hz振动的敏感程度要高于垂直方向4Hz~8Hz,因此总加权加速度均方根值为:

根据人体在垂直方向振动的加权加速度均方根值,可求出垂直方向允许的“疲劳——工效降低界限”的暴露时间(单位:分钟)为:


式中是1分钟“疲劳——工效降低界限”垂直方向4Hz~8Hz加速度允许值,;为10分钟。



因为“暴露极限”的振动加速度值是“疲劳——工效降低界限”的2倍(增加6dB ),“舒适降低界限” 的振动加速度值是“疲劳——工效降低界限”的1/3.15倍(降低10dB ),因此垂直方向振动的“暴露极限” 的暴露时间(单位:分钟)为:

垂直方向振动的“舒适降低界限” 的暴露时间(单位:分钟)为:

垂直方向振动的振级(单位:dB)为:

式中。

在仿真模型中,使整车沿路面生成程序产生的某一等级路面直线匀速行驶,进行仿真计算。在后处理阶段,分析前后车桥、车身的上下方向和人体的上下、前后、左右三个轴向方向的振动加速度和各加速度的均方根值、自功率谱,对这些物理量进行客观评价;同时将人体在三个轴向方向的振动加速度和各加速度的自功率谱输入到开发的汽车平顺性评价程序。在汽车平顺性评价程序中计算人体在三个轴向方向的加权加速度均方根值、总加权加速度均方根值,并计算在垂直方向的“疲劳——工效降低界限”的暴露时间、“暴露极限”的暴露时间、“舒适降低界限”的暴露时间和振级。平顺性评价的流程如图15所示。
图15
04
仿真计算结果
整车平顺性仿真分析应与实车试验相一致,根据平顺性评价试验GB4970“汽车平顺性随机输入行驶试验方法”的要求,试验道路为沥青路(B级路面)和砂石路(C级路面),路面不平度应均匀无突变,车速保持均匀,载荷为满载,根据需要可增作半载或空载。试验车速在沥青路上,货车为40、50、60、70、80Km/h,常用车速为60Km/h;在砂石路上,货车为30、40、50、60Km/h,常用车速为50Km/h。
在本仿真模型中,稳定车速规定为60km/h,路面为B级路面,载荷为满载。为简便起见,人体仅考虑了驾驶员。仿真计算结果如下:
1. 前桥上下方向的振动加速度及加速度功率谱密度如图16所示。

图16
图16的上半部分是前桥的上下方向振动加速度的时间历程,下半部分为加速度的功率谱密度(以下均同)。在加速度的时间历程中有一些大的峰值,这是由于前桥在绕板簧前卷耳上下跳动的过程中还要受到转向纵拉杆对转向节的限制,从而使前桥在上下跳动的过程中还夹杂着一些大的峰值。前桥上下方向振动加速度的均方根值为,加速度的功率谱密度的最大峰值处频率为12.422Hz,对应的峰值为。

2. 后桥上下方向的振动加速度及加速度功率谱密度如图17所示。

图17
从图17中可以看出,由于后桥在上下方向的跳动不受转向系拉杆的限制,因此无论是加速度的进间历程还是加速度的功率谱密度均非常理想。桥上下方向振动加速度的均方根值为,加速度的功率谱密度的最大峰值处频率为15.293Hz,对应的峰值为。

3. 车身的上下方向(垂直)振动和仰俯角振动。车身上下方向的振动加速度及加速度功率谱密度如图18所示。
图18
仰俯角振动的角加速度及角加速度功率谱密度如图19所示。
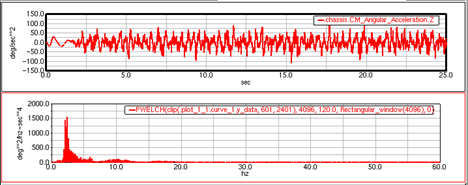
图19
从图18垂直振动的加速度功率谱密度曲线中可以看出,曲线上有一较大的峰值和两个较小的峰值,各峰值处的频率分别为2.1094Hz、7.3828Hz、14.092Hz,对应的峰值分别为、、。从图19仰俯角振动的角加速度功率谱密度曲线中也可以看出,曲线上有一较大的峰值和两个较小的峰值,各峰值处的频率分别为2.3438Hz、3.0762Hz、10.254Hz,对应的峰值分别为、、。车身垂直振动加速度的均方根值为,仰俯角振动角加速度的均方根值为。






车身垂直振动加速度的功率谱密度和仰俯角振动角加速度的功率谱密度都会出现两个较小的峰值是由以下原因引起的:由于汽车基本上是维持直线行驶,则前、后车轮走在同一车辙上,前后车轮的路面输入只存在一个时间滞后(L是轴距,u 是车速),此时在汽车行驶过程中,车身将出现仰俯现象。在本仿真模型中,L=2.4m,。根据轴距的滤波特性,车身的垂直振动和仰俯角振动的加速度频谱曲线会出现花环状形状,花瓣间距为,垂直振动与仰俯角振动的花瓣形状正好反相。在图18中,两较小峰值的间距为,在图19中,两较小峰值的间距为,这与理论计算值6.94Hz非常接近,同时也可看出图19中小峰正好对应图18中的谷底,这说明二者是反相的。从上述分析可知,本次仿真分析的计算结果是较为精确的。




4. 人体(驾驶员)振动。人体在汽车纵向(前进方向)的振动加速度及加速度功率谱密度如图20所示。

图20
人体在汽车前进方向振动的加速度均方根值为,加速度的功率谱密度的最大峰值处频率为2.1094Hz,对应的峰值为。

人体在汽车横向(左右方向)的振动加速度及加速度功率谱密度如图21所示。

图21
人体在汽车横向振动的加速度均方根值为,加速度的功率谱密度的最大峰值处频率为6.1816Hz,对应的峰值为。
人体在汽车垂向(上下方向)的振动加速度及加速度功率谱密度如图22所示。
图22
人体在汽车垂向振动的加速度均方根值为,加速度的功率谱密度的最大峰值处频率为1.6113Hz,对应的峰值为,其它两个峰值处的频率分别为3.3105Hz、5.9473Hz,对应的峰值分别为、。3.3105Hz处的峰值是由人体——座椅系引起,5.9473Hz处的峰值是由于汽车在行驶过程中左右车轮的路面输入高度不完全相同使汽车发生绕纵轴的左右侧倾振动而引起的。


5. 人体(驾驶员)的加权评价。
将上述人体在汽车前进方向、横向和垂向的加速度时间历程和加速度功率谱密度输入到平顺性评价程序,得到人体的各项评价指标数据,如表4所示。
表4
名称
数值
前进方向的加权加速度均方根值[]
0.15398
横向的加权加速度均方根值[]
0.16166
垂向的加权加速度均方根值[]
0.38148
总加权加速度均方根值[]
0.49318
总加权振级[dB]
113.86
垂向的“疲劳——工效降低界限”的暴露时间[hour]
35.92
垂向的“暴露极限” 的暴露时间[hour]
143.66
垂向的“舒适降低界限” 的暴露时间[hour]
3.592
从根据加权振级的化分界限来看,该车的总加权振级为113.86dB,属于稍有不适的范围,但作为载货汽车而言,这已满足舒适性要求。
05
结论
通过一个具体的整个案例,阐述了进行车辆动力学中的平顺性发析的过程与方法,对进行这方面的工作的工程技术人员提供了参考与借鉴。
应用多体动力学与二次开发程序相结合,实现了整车在随机路面输入条件下的平顺性仿真分析:
- 在仿真模型中充分考虑了前后悬挂系、转向系、动力总和传动系部分,并对前后钢板弹簧在载荷作用下的几何变形和刚度作了深入地仿真分析,提出了建立前后钢板弹簧多体动力学仿真模型的新方法。
- 在仿真模型中建立了前后轮胎模型,并给出了在满载条件下的前后轮胎的详细参数。
- 通过对路面不平度地深入研究,与二次开发的路面生成程序相结合,生成了与轮胎模型相适应的路面文件。
- 通过仿真计算,得到了前后车桥、车身垂向振动的加速度均方根值和加速度功率谱密度,同时也得到了人体(驾驶员)在汽车前进方向、横向和垂向振动的加速度均方根值和加速度功率谱密度。
- 根据人体的加权评价要求,与二次开发的平顺性评价程序相结合,得出了人体(驾驶员)各项加权评价指标的数据。
通过仿真分析可知,该车的平顺性是满足要求的。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
