




 广告
广告





















































混合动力车辆机电复合驱动技术
2020-04-29 23:30:32· 来源:EDC电驱未来

1 混合动力车辆的分类混合动力车辆有多种分类方法,如按连接部件的位置分类、按混合比的大小分类及按驱动系统的复杂程度分类.根据动力传递路线,可以将混合动力
1 混合动力车辆的分类
混合动力车辆有多种分类方法,如按连接部件的位置分类、按混合比的大小分类及按驱动系统的复杂程度分类.根据动力传递路线,可以将混合动力汽车划分为:串联式、并联式、混联式和复合式4种类型.
(1)串联式混合动力车辆
串联式混合动力车辆的发动机带动发电机发电.发电机发出的电能供给驱动电动机或存储于动力电池中,如图1所示.该驱动系统结构布置自由度大,控制难度小,但传动效率较低.
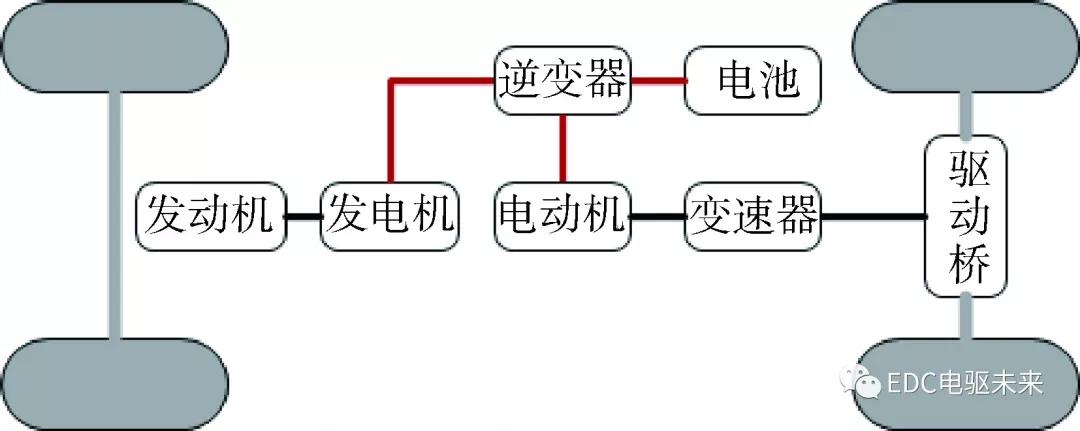
图1 串联式混合动力车辆
(2)并联式混合动力车辆
并联式混合动力车辆的发动机和电动机通过动力耦合装置与传动轴连接,车辆既可以由发动机经传动系统机械驱动,又可以由驱动电机经传动系统驱动,如图2所示.该驱动系统传动效率较高,但结构复杂,布置受到一定限制.
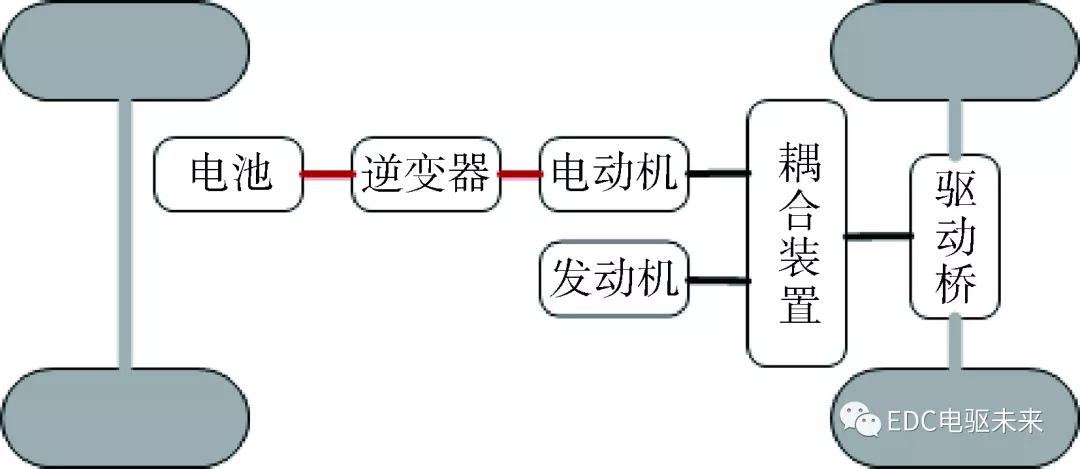
图2 并联式混合动力车辆
(3)混联式混合动力车辆
混联式混合动力车辆是在并联式混合动力车辆的基础上,增加了由发动机经发电机发电给电机,再由电机驱动车辆的传递路线,是串联式与并联式的结合,如图3所示.该驱动系统的其工作模式更多,结构和控制最复杂,要求布置更紧凑.
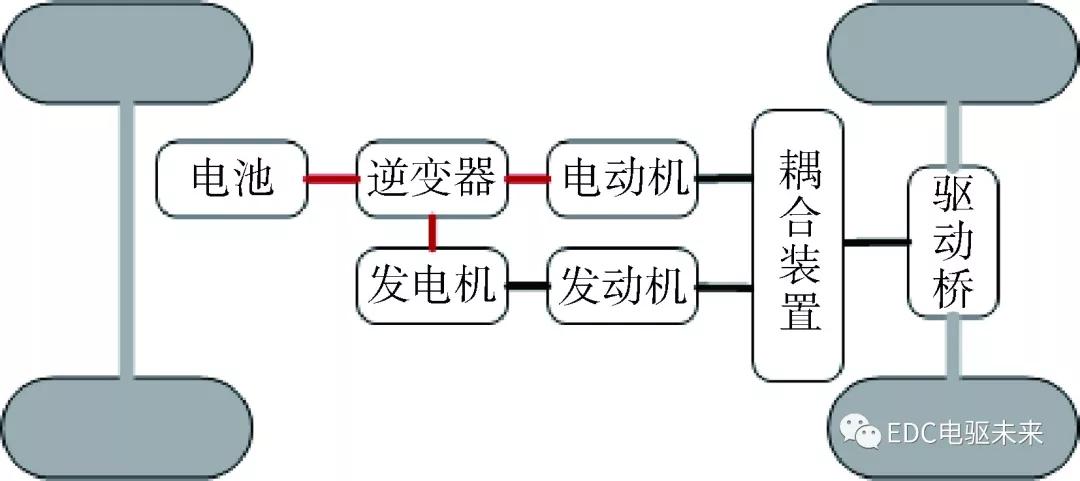
图3 混联式混合动力车辆
(4)复合式混合动力车辆
复合式混合动力车辆的前(后)轴由发动机单独驱动,后(前)轴由驱动电机单独驱动,两种动力系统不需要特定的动力耦合装置,而是通过路面实现动力耦合,所以该构型也被称为TTR HEV(through-the-road hybrid electric vehicle).驱动构型如图4所示.该驱动系统可由传统汽车底盘改装而来,制造成本较低,结构简单,布置方便.
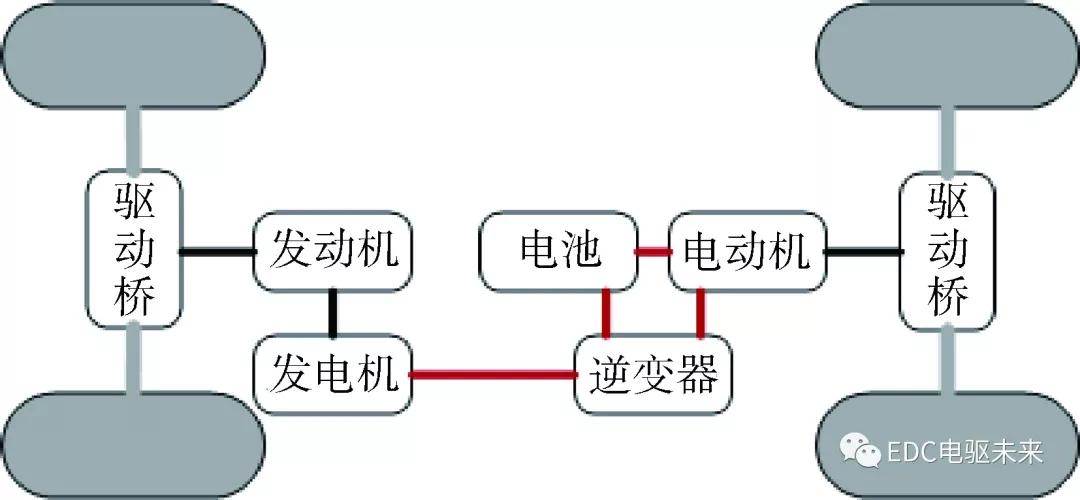
图4 复合式混合动力车辆
机电复合驱动的发动机和电机分别向不同的驱动桥提供驱动力,是常规驱动技术与混合动力技术相结合的产物,兼具常规车辆的动力性、通过性、操纵性和混合动力车辆的经济性.
2 机电复合驱动技术研究现状
目前,国内外科研机构已经研发出机电复合驱动混合动力原型车.20世纪90年代末,法国雷诺汽车公司推出“Next”插电式机电复合驱动混合动力汽车;马来西亚理工大学的团队将传统汽车改装为带轮毂电机的机电复合驱动汽车;北京理工大学对8×8型多轴轮式机电复合驱动车辆展开了研究,该车的柴油发动机额定功率为330 kW,在极限机动的工况下,动力电池可以5C放电率提供300 kW的功率,其驱动系统如图5所示;湖南大学与长丰集团联合研制了CFA6470HEV机电复合驱动越野车;合肥工业大学的团队着重研究了插电式机电复合驱动轿车.针对机电复合驱动混合动力技术的主要研究方向有能量分配控制、模式切换过程的协调控制和牵引力控制等.

图5 8×8机电复合驱动系统示意图
2.1 能量分配控制技术
2.1.1 国外研究现状
马来西亚的S. A. Zulkifli等以加速踏板位置、车速和发动机效率为门限,设计了逻辑门限能量分配控制策略.伊朗的N. Fallahi等对比了逻辑门限控制策略和模糊逻辑控制策略,发现车辆在模糊逻辑控制策略下有更好的燃油经济性和排放性能,同时动力电池SOC能维持在理想范围内;H. Moghbeli等提出了采用双模糊控制器的能量管理策略,其中一个控制器以(SOC-SOC_min)/(SOC_max-SOC_min)为输入,另一个控制器以SOC和其导数为输入,可有效避免电池SOC的急剧下降.美国的J. B. Holtz 等提出了基于路面载荷的功率分配方法:缓慢变化的负载由发动机提供,急速变化的负载由电机提供;意大利的C. Pisanti等采用以SOC为状态变量,功率分配系数为控制量,最小燃油消耗为代价函数的动态规划方法优化了整车能量分配策略.

2.1.2 国内研究现状
上海交通大学的马东兵等设计了逻辑门限能量管理策略,保证发动机工作在高效区域.但静态逻辑门限控制策略无法保证车辆燃油经济性最优.张军提出一种可变逻辑门限控制策略,以发动机和驱动电机的输出特性、电池的SOC为主要依据计算动态功率门限值.华南理工大学的黄向东提出一种工作模式规则控制和优化控制相结合的复合型控制策略,对主要的工作模式采用基于系统效率最优的瞬时优化方法求解.浙江大学的江冬冬建立机电复合驱动车辆效率分析模型,对比传统规则策略与动态规划控制策略的仿真结果,获得新规则控制策略;并采用学习向量量化神经网络识别实际运行工况,提高新规则控制策略在不同工况下的适应性.湖南大学的余群明采用模糊逻辑方法设计能量分配控制策略,根据需求转矩、电池电量、电机转速、传东系速比和车速决定发动机扭矩、驱动电机扭矩、启动电机扭矩大小;黄伟博士将优化计算方法得到的功率分配结果作为制定模糊控制规则的指导依据,提出了基于瞬时优化的模糊逻辑控制策略.广州汽车集团的夏珩等基于发动机效率、ISG 电机效率、后轴驱动电机效率,以系统总效率最优为目标函数实现多动力源的功率分配.
2.1.3 研究现状分析
针对机电复合驱动车辆的能量分配控制策略的研究,主要方法有两种:(1)基于规则的逻辑门限控制策略及其优化,包括适应动态工况的可变逻辑门限控制策略、基于规则与效率最优控制策略相结合和基于规则与动态规划控制策略相结合,优化后的控制策略对动态工况有一定的适应性;(2)模糊逻辑控制策略及其优化,对模糊逻辑控制策略进行了深入研究、并将其与瞬时优化控制策略相结合进行优化.此外对智能控制算法,如神经网络算法,也进行了初步研究.在理论研究上国内与国外并无明显差距.
2.2 模式切换协调控制技术
2.2.1 国外研究现状
机电复合驱动混合动力车辆的模式切换动态协调控制与并联式混合动力车辆的控制内容和原理相似,针对这方面的研究,Roy等设计了发动机转矩观测器,实时计算发动机的动态转矩,通过电动机输出相应的补偿转矩来抵消发动机的转矩迟滞;Korowais等将工作模式划分为不同的子域,并设计了相应的状态控制器,分析了混杂系统下的模式切换协调控制问题.V. T. Minh和A. Rashid等采用模型预测的控制方法,以离合器完全接合后的速度和转矩值为目标值,控制离合器接合过程,使输出速度和转矩逐步转变为目标值;R. Beck等重点关注了离合器接合过程及系统平顺性问题,将离合器转矩作为已知扰动量,设计了模型预测控制器处理切换过程;Kim等考虑发动机转矩误差干扰和离合器转矩干扰,设计了含扰动项的观测器,采用电机转矩补偿,从而降低模式切换冲击.
2.2.2 国内研究现状
清华大学的童毅等分析了动态协调控制问题的产生原因及研究的必要性,提出“发动机转矩开环+发动机动态转矩估计+电动机转矩补偿”的控制算法;湖南大学的黄伟提出了动态协调控制品质的评价指标,总结出模式切换时传动系统的工作过程和控制要点;张军等提出一种新的电机转矩算法来实现纯电动模式与发动机工作模式的平顺切换,算法根据发动机输出转矩计算出电机等效输出转矩;同济大学的赵治国等研究了从纯电动驱动模式到混合驱动模式的切换过程,以混杂系统切换为理论依据,设计出无扰动模式切换控制策略.合肥工业大学的钱立军等提出一种“发动机调速+离合器模糊PID控制+发动机动态转矩查表+双电机转矩补偿控制”转矩协调控制方法;北京交通大学的赵敏敏全面研究了动态协调控制策略,包括离合器动态控制的同步调速、快速结合及逐步加载;变速箱动态过程的卸载摘挡、同步调速和加载挂档等.
2.2.3 研究现状分析
针对机电复合驱动车辆的模式切换协调控制策略的研究,一些学者分析了动态协调控制品质的评价指标,采用了发动机转矩查表、估计和电机转矩补偿的控制方法.大都单独研究了纯电动模式与混合驱动模式或纯电动模式与纯发动机模式间的切换.国外还采用模型预测的方法对离合器的接合过程进行控制,而国内很少有文献考虑离合器的接合过程.
2.3 稳定性控制技术
2.3.1 国外研究现状
日立汽车公司根据发动机及驱动电机转矩状态,分析计算出驱动轮与路面间的利用附着系数,得到目标驱动和制动转矩,然后协调发动机、电机及制动器的控制器,实现驱动防滑控制;德国 E. Galvagno 等通过时域和频域响应分析研究了机电复合驱动汽车的驾驶性能和传动系统的动力传递特性,提出能平衡模型复杂度和控制效果的有效模型,描述了前后轴转矩分配对车辆驾驶性能的影响;美国的Amanda Hyde等通过分析传动系统的动态特性和轮胎的摩擦特性,提出可以通过合理地选择工作模式使车辆在低附着路面下实现车轮防滑驱动控制;伊朗的P. Naderi以横摆角速度偏差和横摆角速度变化率为参考值,采用模糊逻辑方法计算两后轮的驱动转矩差,从而得到轮毂电机的输出目标转矩;美国的R. Osborn等引入前后轴转矩分配系数和左右车轮转矩分配系数,与横摆角速度、侧向加速度一起作为变量,计算各车轮需求转矩;Ossama Mokhiamar 等提出以轮胎侧向力及纵向力最优分布为目标,通过优化加权系数来改善整车操控性与稳定性.
2.3.2 国内研究现状
上海交通大学的朱建新提出了在四驱模式下根据前后轴转速差确定转矩分配比的方法;华南理工大学的黄向东通过对比当前路面与标准道路的滑转率和纵向附着系数曲线,采用模糊逻辑控制方法,估计当前路面下的最优滑转率,以此调节电机输出扭矩的大小;同济大学的赵治国综合比例、模糊和比例积分控制的优点,开发了P-Fuzzy-PI多模态分段驱动防滑控制算法;重庆大学的谢鸣根据驱动轮角加速度、驱动转矩及滑转率之间的关系确定最佳角加速度α,并以此作为控制目标,制定加速踏板开度修正控制策略、前后驱动轴转矩分配控制策略及前、后限滑差速转矩控制策略;徐凌凡等依据两侧力矩大小相同方向相反的原则,通过动态比例调节前后轴的力矩分配,基于仿真分析了不同比例系数下的控制效果;吉林大学的陈国迎在整车控制分配器的设计中,考虑了各等式约束与不等式约束,并引入加权轮胎利用率平方和最小为优化目标;北京理工大学的许明锐以实际横摆角速度及质心侧偏角与理想值间的偏差作为输入,建立了基于 PID 控制的横摆力矩决策模块,以轮胎附着利用率最优为优化目标,建立了目标横摆力矩到各车轮纵向力的分配方法.
2.3.3 研究现状分析
国外从控制方法、动力传递特性、模型等方面对此机电复合驱动车辆稳定性控制技术进行研究,理论基础相对完善.国内在这方面的研究较少,与国外差距较大.
3 机电复合驱动关键技术
从机电复合驱动技术的研究现状来看,整车能量控制技术和车辆稳定性控制技术是目前的研究热点,也是机电复合驱动车辆发展的关键技术.此外,驱动电机是作为车辆的重要动力部件,也是值得重视的研究点.
3.1 整车能量控制技术
整车能量控制策略包括能量分配控制策略和模式切换过程中的协调控制策略.能量分配控制策略的目标就是在保证动力性的基础上,使发动机、发电机等部件尽可能工作在高效区域.同时,机电复合驱动车辆不同工作模式间的切换常伴随不同动力源输出转矩和转速的大幅变化,发动机响应速度较慢,会导致一段时间内动力不足.切换过程中离合器接合过快会造成车辆冲击,接合过慢会造成离合器磨损、动力中断或不足.模式切换过程中协调控制策略的好坏决定了整车动力性和乘员舒适性的优劣.
目前,能量分配控制策略主要采用了逻辑门限控制策略与模糊逻辑控制策略.单一的控制策略都有其局限性,如逻辑门限控制策略的门限值不能随工况动态变化,控制效果较差;全局优化控制策略必须已知循环工况,计算复杂,不适合实时控制.如果将两种或多种控制策略相结合,会有较好的控制效果.目前已有多位学者采用这种方法对控制策略进行了优化,取得不错的效果,能量分配控制策略的组合化是能量分配控制的发展趋势之一.同时,随着智能算法的不断发展,基于人工智能的能量管理策略将有光明的前景,智能控制能很好地处理非线性问题,其强大的自学习能力可以适应车辆不断变化的行驶工况,控制更加精确,能量分配控制策略的智能化也是未来研究的主要方向.
目前,动态协调控制中的发动机转矩大都由转矩查表估计得到,精度和动态适应性差.为了使电机补偿转矩更加准确,必须精确测得发动机瞬时转矩,并合理控制离合器的接合,从而控制离合器的传递转矩,得到发动机传递给车轮的实际驱动转矩.发动机转矩识别和离合器的精确化控制是协调控制的研究重点.
3.2 车辆稳定性控制技术
车辆稳定性控制技术包括车辆防滑控制和横摆力矩控制.车辆在湿滑、冰雪路面上行驶,经常会出现轮胎滑转的现象.一方面会加快轮胎的磨损,另一方面会降低轮胎的侧向附着力,导致车辆侧滑、甩尾,甚至造成事故.车辆转弯时,若不满足目标横摆力矩会导致过多或不足转向,不能按照驾驶员意图完成转向,过多转向甚至会造成车辆失控.机电复合驱动车辆轴间独立驱动的特性可合理控制各轴或各轮驱动力、制动力,防止车轮滑转,提高车辆转向过程的稳定性、安全性.
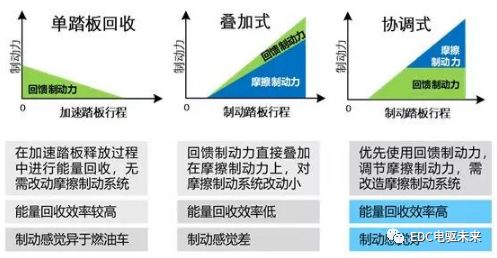
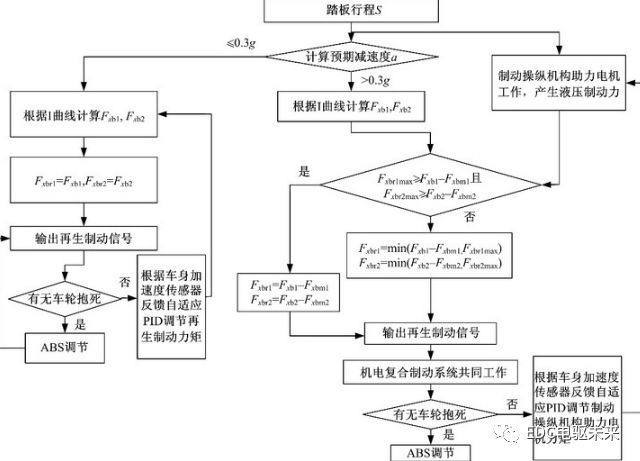
对于机电复合驱动混合动力车辆,考虑到驱动电机转矩响应速度快、控制精确,且制动/驱动切换容易,可不再利用防抱死制动系统来实施驱动防滑功能.车轮打滑或车辆不稳定时将优先利用驱动电机进行驱动力控制,发动机转矩调节响应速度较慢,可用来辅助驱动力控制,必要时再利用传统制动机构.目前的研究方法主要是调节驱动电机与发动机的输出转矩,随着研究的深入,如何在滑转和失稳时合理分配驱动电机、发动机和制动机构间的驱动力/制动力将受到研究人员的重视.
3.3 驱动电机及其控制技术
驱动电机是机电复合驱动混合动力车辆的关键部件之一.从工作要求来看,驱动电机要有较宽的调速范围及恒转矩范围,以及较高的过载系数,能在较宽的工作区域内高效运行;其次,驱动电机工作过程中会有转矩模式和转速模式,电机控制应当精确、稳定且响应迅速;另外,驱动电机还要有较高的功率密度,且成本不能过高,散热、耐温和耐潮性能要强,能在较恶劣的环境下长期工作.
传统车辆为保证换挡平顺,需要通过离合器分离、接合和同步器同步接合套与接合齿圈转速来减小换挡冲击.机电复合驱动混合动力车辆的电驱桥可以取消离合器和同步器,利用电机快速精确的转矩与转速响应,与换挡机构协调控制,实现平顺换挡.这种换挡控制可改善车辆动力中断过长与换挡冲击较大的不足,同时可降低系统成本与重量,提高传递效率.在无离合器、无同步器的换挡系统中,对电机的转速调节能力提出更高的要求,是未来的研究重点.
相比于电机+驱动桥的结构布置,轮毂电机直接驱动车轮的布置有一系列优势:传递效率高,控制灵活,可降低整车质量,能有效地节省底盘空间,从而增加乘客空间.这种布置对电机提出更高的要求:体积更小,扭矩更大,更高的能量回收效率.轮毂电机是驱动电机重要的研究方向之一.


4 结 论
机电复合驱动混合动力技术是近年逐渐发展起来的,国内外学者将研究重点放在串联式、并联式和混联式混合动力车辆上,所以机电复合驱动技术的研究成果相对较少.国外学者更多地关注车辆稳定性控制,国内学者则更多的对能量控制策略展开研究,但都处于起步阶段,发展空间很大.
随着人工智能、车联网、大数据技术的发展,混合动力车辆将能通过卫星定位系统、智能驾驶系统和智能交通系统,融合现代通信与网络技术,获取下一路段的路况信息,采用智能控制方法预测未来一段路线上的驾驶功率需求,为车辆控制提供判断基础,充分发挥机电复合驱动车辆的优势.随着微电网技术的发展和V2G(vehicle to grid)概念的提出,插电式机电复合驱动混合动力技术将是发展的新方向,车辆与电网智能互联,有效地储存和循环电能.
从国家战略发展的角度来看,政府制定实施了一系列新能源汽车发展政策,车企将在未来的某个节点停售燃油车.而据公安交管局统计,截止2017年3月底,我国机动车保有量突破3亿辆,其中,汽车达2亿辆,传统燃油车的基数大,直接摒弃是不现实的,将传统燃油车改装为机电复合驱动混合动力车辆是有效可行的方式.
机电复合混合动力车辆的机械桥与电驱桥独立驱动,仅需在传统车辆的结构基础上加装驱动电机及控制器,成本较低,有很好的应用前景.尤其是对卡车而言,其底盘空间大,可操作性更强.两套动力驱动系统可以保证车辆在一套系统失效的情况下带故行驶,提高了行驶可靠性.该构型能有效地解决现役发射平台动力性提升、超大型发射平台发动机功率不足等问题.
- 下一篇:新能源专项验证与策划
- 上一篇:特斯拉也在研究“伪激光雷达”



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
