




 广告
广告





















































交通拥堵辅助TJA中的详细设计原理
2020-07-20 17:49:49· 来源:焉知自动驾驶 作者:Aimee

交通拥堵辅助TJA作为智能驾驶二级功能,可以帮助驾驶员在堵车时候,为驾驶员提供一定的驾驶辅助,缓解驾驶员的疲劳。与智能驾驶一级功能ACC(只进行纵向控制不同
交通拥堵辅助TJA作为智能驾驶二级功能,可以帮助驾驶员在堵车时候,为驾驶员提供一定的驾驶辅助,缓解驾驶员的疲劳。与智能驾驶一级功能ACC(只进行纵向控制不同)不同,TJA需要进行横纵双向控制,它是ACC功能的一个拓展版,可以跟ACC一样走走停停,但增加了轻微转向调整的功能。TJA需要对车道标志以及车辆的位置和运动的检测,从而可以为后续模型计算提供有力的输入。与高速车辆根据检测到的车道线做对中行驶不同,TJA可以做到在无完整车道线的情况下,根据前车行驶轨迹做跟随行驶。
TJA系统功能迭代图
对于一般的TJA控制策略而言,只需要利用前视摄像头对前方车辆和道线进行检测作为系统控制的输入,而由于全景系统配置的侧面和后视摄像头则可以监视并排行驶的汽车或与汽车并排的车道标记,因此高级别TJA对于车辆侧面和后方的交通信息全面检测也可以为驾驶员提供更为全面的驾驶辅助。

总体来说,TJA的轨迹预测过程包括对于静态环境估计(如车道模型),环境过程估计(一般指车道环境中行驶的车辆),此外,还包括附加传感器(诸如导航信息、环视摄像头信息等)对TJA估计过程的优化。
静态环境估计
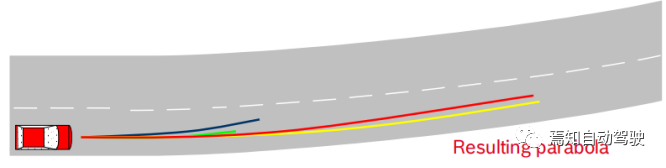
静态环境估计一般指对于行驶车道模型估计,车道模型的一般估计方法是采用抛物线形式进行,而以自车坐标为原点建立的车道抛物线模型表示为

该抛物线只有两个参数,其求解过程是通过在实际估计过程中对道路模型中的两个实际障碍点的探测,其结果便可带入到抛物线中进行二参数方程求解。同时通过不断更新的实际点带入方程求解后获得不同的方程参数解,对方程解的评价过程是利用直方图描述其求解质量的,若实际探测到的前方目标位置与预测轨迹曲线差值不具有一致性,那么相应的直方图分布就比较零散,不具有集中分布的特性。直方图具有收敛一致性时,说明求解的抛物线方程是有效的。
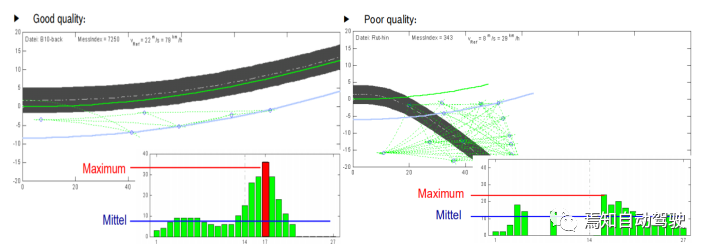
如下图表示采用了静态环境估计模型利用不同探测点对于车道曲线模型进行估计的结果。可以看出,其中红色的估计曲线模型具有最好的质量权重,其轨迹结果最符合预期。
动态过程估计
动态过程估计是指对于目标车辆的行驶轨迹预测,有两种不同的计算TJA行驶轨迹的方法,其一是关注附近运动车辆的位置,而另一个涉及车道标记。由于环境探测过程中不止一辆车,因此相应的估计过程包含如下几个步骤:
1)传感器探测到环境中的所有车辆目标,TJA系统模型对于所有运动车辆的历史轨迹进行估算;
2)选择自车前方对应的车辆作为跟随目标,且该对应前方车辆需要去除对向来车对本车轨迹估计的影响;
3)采用如上提到的曲线模型对实际探测到的同向行驶车辆进行轨迹预测,并对于预测结果进行分组;
4)计算估计轨迹质量,质量评估采用权重分配,权重最高的最为轨迹曲线的计算结果;
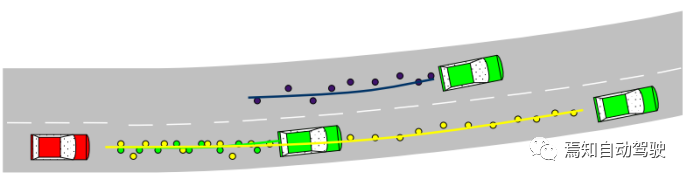
如下图表示了对于前方车辆以及侧前方车辆按照实时打点进行估计的结果,其中前方车辆的行驶轨迹在预测中最能拟合出一条一致性曲线,因刺激具备较好的质量以及连续性。由此可以暂时摒除旁边车道车辆对本车道的影响。
下面我们将专注于对本车道行驶车辆的轨迹过程估计方法:
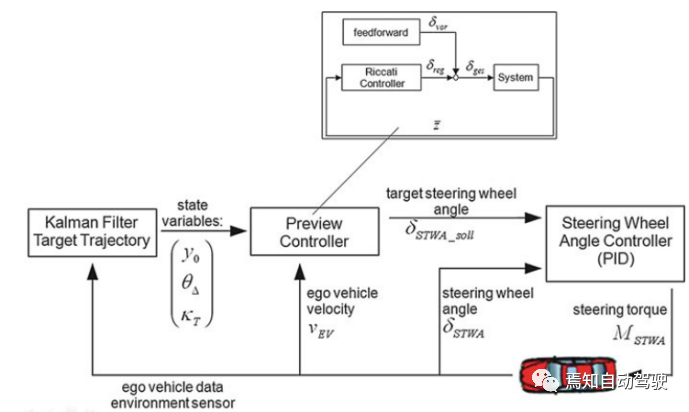
TJA的控制逻辑中有两种不同的信息需要输入来计算目标轨迹,其一是考虑相邻前方车辆位置以及运动状态,其二是考虑车道标线;为了获得TJA可用于控制的路径,其目标轨迹必须包含带有一定偏移量的数据信息,该偏移量表示为偏离车道中心线的距离,表示为y0,与轨迹相关的航向角θΔ,曲率κT。设计TJA行驶轨迹过程实际是采用预测加更新的方式进行,预测即通过对前一时刻的目标行驶状态的探测生成相应的预测轨迹从而来确定最新行驶轨迹的估算。因此,TJA的轨迹计算过程主要采用了卡尔曼滤波器设计策略,如上相应的横向控制输入值,可以作为控制卡尔曼滤波的观测值,如下将详细讲解如何设计TJA的卡尔曼滤波器。
对于TJA的轨迹预测过程中,首先需要考虑其预测函数方程,如下图表示出了以自车为中心建立的轨迹预测图,其中红色线表示预测轨迹,车辆自身的运动状态包含相应的车速VEV,航向角βEV,横摆率ΨEV,PT(xT/yT)表示预测到的前方车辆的即时轨迹上的坐标点,该点表示下一时刻前车将要行驶到该处。
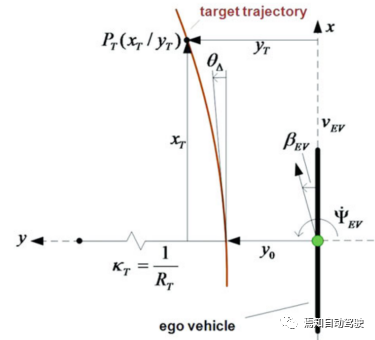
引导轨迹示意图
如下方程可用于表示一辆运动车辆沿着一条轨迹进行行进的过程:

如下图表示为横向环路控制系统;
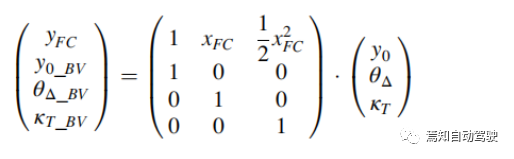
为了将前车PFC(xFC/yFC) 相对位置考虑进来,我们假设前方车辆将跟随其目标轨迹进行运动,即xT = xFC,yT = yFC,相应的关系可表示如下:

同时,如果摄像头仍旧能够检测到部分车道标线信息,该标线相对于车道中心线的距离为y0_BV,与车道线方向为θΔ_BV,车道曲率为κT_BV,由此可以直接计算出相对于车道中心线的目标路径,而索引BV表示来自于摄像机图像处理后的的车道标线信息。
由此得到利用车道标线信息计算出的轨迹方程为:
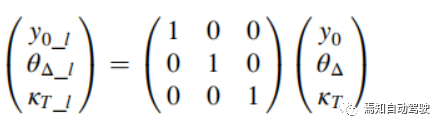
当前方信息缺失时,如上相应的公式将变成如下形式。
如上1表示为计算目标轨迹的相关信心来自于不同的而信息源,设置该变量是为了激活TJA系统前,在环境中捕获冗余信息作为函数输入,比如前视摄像头、泊车摄像头或高精度地图等。系统必须设计成当车辆无法处理极限工况时,其该冗余信息可以用于帮助驾驶员在其反应时间内接管系统。同时,由于以上两种不同的信息来源(道线和前车)均可以计算相应的目标轨迹,而最终的目标轨迹实际是希望采用最好质量的信息作为输入源。这里我们可以采用协方差Q来作为采用前方引导车或者车道标线的权重。最终选择的向量以及相对目标轨迹可以用来调整横向控制,确保最终的转向靠近目标导线。
当对目标进行探测并获得其质量信息q时,可以利用静态目标过程估计SCP以及环境目标过程估计ECP相结合的方式,进行终极环境建模,相应的模型如下:
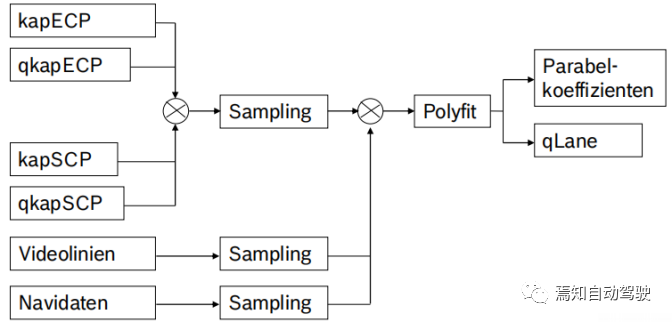
如上图中,当利用环境估计数据ECP及其质量数据与静态过程估计数据及其质量数据作为输入时,采用上采样数据形式对其整体数据进行采样后形成基础数据,然后利用诸如附加摄像头(全景系统)、高精度导航系统探测到的实际进行结合后,通过拟合多项式系数方式生成预测方程多项式系数,并同时生成带有质量信息的虚拟车道信息。
总结
TJA适用于当摄像头等传感器检测不到车道标线信息时,利用前方探测到的车辆信息进行横向控制,由于ADAS车辆的摄像头通常安装在挡风玻璃后方,故前方较低速的相邻车辆通常会遮挡当前车辆摄像头对目标车道线的检测,而在交通拥堵的情况下,前方车辆的探测信息对于当前车辆的轨迹预测规划则更可靠、更稳定。因此,这种情况下应该在车道线消失点继续跟随可探测的前车保持横向对中行驶。此外,在很多低速情况下,当其前视摄像头探测视野范围受阻,则可以利用在泊车控制中的环视摄像头进行道线探测,并维持车辆对中到车道中央继续行进,因为环视摄像头的探测距离和探测范围有限,因此该策略仅适合于跟随前车停走状态下的低速行驶,配合跟车轨迹行驶控制,可以进一步延长拥堵状态下的横向控制时间。
对于TJA过程估计中需要根据其定义的可行驶区域来划分相应的前方交通参与者,并定义其与自车的偏移量。在TJA中,当没有车道线信息时,对于十分复杂的交通情况不太可能被直接分析出来,比如当车道线消失时刻点不是平行状态时,可能造成后续对于虚拟车道线的模拟无法继续进行。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
