




 广告
广告





















































自动驾驶的LiDAR:一场技术的军备竞赛
2020-08-05 23:43:22· 来源:智车科技

在自动驾驶领域,一场关于激光雷达在未来自动驾驶汽车中所扮演角色的争辩正越演越烈.激光雷达是一种3D环境制图器,对于支持者来说,它对L5自动驾驶至关重要;而
在自动驾驶领域,一场关于激光雷达在未来自动驾驶汽车中所扮演角色的争辩正越演越烈.激光雷达是一种3D环境制图器,对于支持者来说,它对L5自动驾驶至关重要;而对于特斯拉的埃隆•马斯克等反对者来说,它是通往“死胡同”捷径。但是,关于激光雷达的实际情况是怎么样的呢?
在自动驾驶领域,一场关于激光雷达在未来自动驾驶汽车中所扮演角色的争辩正越演越烈.激光雷达是一种3D环境制图器,对于支持者来说,它对L5自动驾驶至关重要;而对于特斯拉的埃隆•马斯克等反对者来说,它是通往“死胡同”捷径。但是,关于激光雷达的实际情况是怎么样的呢?
什么是激光雷达?
激光雷达,是光探测和测距的首字母缩写,本质上是一种声纳,利用脉冲激光波绘制到周围物体的距离。它被大量应用于自动驾驶车辆实时导航中。它的优势包括精确深度感知,这使得激光雷达的测距范围十分广阔,短几厘米,多则60米。它还非常适合3D制图,这意味着返回的车辆可以在可预测的环境中导航,这对于大多数自动驾驶技术来说是非常有利的技术条件。虽然激光雷达有它独特的优势,但是仍然受到一个关键因素的阻碍——其高昂的成本。
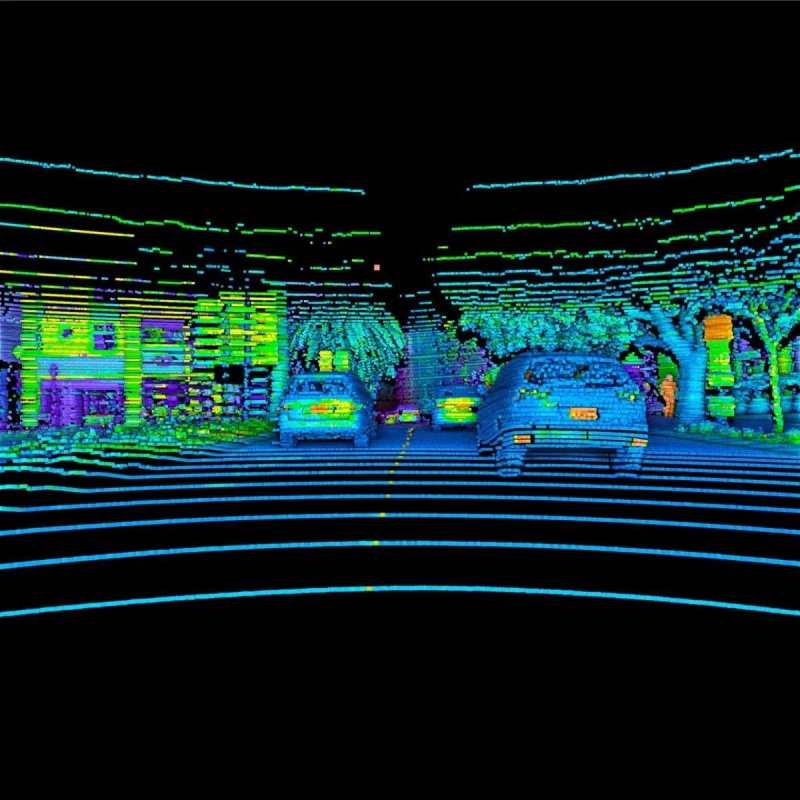
2019年,Velodyne的Alpha Puck(360度水平视场激光雷达)拍摄的繁忙街道场
图片来源:路透社
激光雷达不是唯一的自动驾驶检测技术,摄像头也是,且是激光雷达的主要竞争对手,被特斯拉视为最好的技术手段。埃隆·马斯克(Elon Musk)曾表示,激光雷达是最没用的传感器。该观点认为,人类只能在周围有可见光的基础上开车,所以机器人也应该能够做到这一点。摄像头要比激光雷达小得多,也便宜得多(尽管需要更多),而且具有更好的分辨率和颜色的优势,这意味着它可以读取交通灯和标志。然而,摄像头在普通驾驶条件下也有很多缺点。比如,激光雷达不依赖环境光,产生自己的光脉冲,而对于突然的光线变化、阳光直射甚至雨的情况下,摄像头更容易受到干扰。此外,激光雷达不依赖环境光,产生自己的光脉冲,而摄像头对突然的光线变化、阳光直射甚至雨水更敏感。
激光雷达的优势远不止此。激光雷达能比摄像头更好的判断远近距离。而摄像头需要大量的计算,比如复杂的神经网络,来测量物体之间的距离,通过聚合不同的摄像头信号或一段时间内的单个信号来测量。2D图像便可以欺骗摄像头,使其更容易受到恶意攻击。在颜色检测方面,激光雷达的支持者认为,在一个互联和无人驾驶的世界里,交通信息可以通过来自交通灯和其他标记的机器对机器信号来分配,解决了激光雷达的一个关键缺陷。
此外,激光雷达的成本也呈下降趋势。谷歌的第一辆无人驾驶汽车原型在2012年使用了价值7万美元的激光雷达。2017年,Waymo的工程师宣称他们已经将成本降低了90%。今天,一些顶级的激光雷达制造商,如卢米纳尔提供自动驾驶等级激光雷达低于1000美元。
为什么支持摄像头?
除了价格和颜色和标志识别之外,摄像头的优势更为微妙。激光雷达如何识别行人正低头看手机,可能在街上闲逛?激光雷达能区分塑料袋和障碍物吗?激光雷达能识别一个骑自行车的人正要进入一个新的车道吗?这些问题的答案是否定的。所以一些激光雷达的反对者认为,一旦摄像头传感器变得完美,激光雷达就会过时。

2020年特斯拉汽车正面中程摄像头拍摄的照片
图片由特斯拉提供
摄像头占据主导地位的关键障碍是人工智能,它能够读取和解释大量的数据,而且必须在几毫秒内识别出各种情况。这有助于解释当前流行的观点,即最好的选择是混合使用激光雷达优越的视觉和摄像头的颜色、物体和文本识别,以获得周围环境的清晰图像。值得注意的是,这种解决方案的计算量也很大,当然依赖于人类编写的算法。
在这场争论中,本质上是激光雷达的成本曲线和AI程序员的成本曲线的一场竞赛。如果激光雷达达更快的达到了一个接受的价格,那么它可以成为真正地可用的可靠的普遍的廉价的且非常准确的距离传感器。至少与摄像头结合起来的方案是可行的。虽然在未来激光雷达可能不是绝对必要的,它的可靠性,简单性和普遍性可以使它成为一个达到L5非常有吸引力的跳板。然而,也不排除特斯拉或其他人成功地在不久的将来创造一个复杂的神经网络能够快速、可靠地处理摄像头的成像信息。
所以,激光雷达和摄像头,军备竞赛开始了。
在自动驾驶领域,一场关于激光雷达在未来自动驾驶汽车中所扮演角色的争辩正越演越烈.激光雷达是一种3D环境制图器,对于支持者来说,它对L5自动驾驶至关重要;而对于特斯拉的埃隆•马斯克等反对者来说,它是通往“死胡同”捷径。但是,关于激光雷达的实际情况是怎么样的呢?
什么是激光雷达?
激光雷达,是光探测和测距的首字母缩写,本质上是一种声纳,利用脉冲激光波绘制到周围物体的距离。它被大量应用于自动驾驶车辆实时导航中。它的优势包括精确深度感知,这使得激光雷达的测距范围十分广阔,短几厘米,多则60米。它还非常适合3D制图,这意味着返回的车辆可以在可预测的环境中导航,这对于大多数自动驾驶技术来说是非常有利的技术条件。虽然激光雷达有它独特的优势,但是仍然受到一个关键因素的阻碍——其高昂的成本。
2019年,Velodyne的Alpha Puck(360度水平视场激光雷达)拍摄的繁忙街道场
图片来源:路透社
激光雷达不是唯一的自动驾驶检测技术,摄像头也是,且是激光雷达的主要竞争对手,被特斯拉视为最好的技术手段。埃隆·马斯克(Elon Musk)曾表示,激光雷达是最没用的传感器。该观点认为,人类只能在周围有可见光的基础上开车,所以机器人也应该能够做到这一点。摄像头要比激光雷达小得多,也便宜得多(尽管需要更多),而且具有更好的分辨率和颜色的优势,这意味着它可以读取交通灯和标志。然而,摄像头在普通驾驶条件下也有很多缺点。比如,激光雷达不依赖环境光,产生自己的光脉冲,而对于突然的光线变化、阳光直射甚至雨的情况下,摄像头更容易受到干扰。此外,激光雷达不依赖环境光,产生自己的光脉冲,而摄像头对突然的光线变化、阳光直射甚至雨水更敏感。
激光雷达的优势远不止此。激光雷达能比摄像头更好的判断远近距离。而摄像头需要大量的计算,比如复杂的神经网络,来测量物体之间的距离,通过聚合不同的摄像头信号或一段时间内的单个信号来测量。2D图像便可以欺骗摄像头,使其更容易受到恶意攻击。在颜色检测方面,激光雷达的支持者认为,在一个互联和无人驾驶的世界里,交通信息可以通过来自交通灯和其他标记的机器对机器信号来分配,解决了激光雷达的一个关键缺陷。
此外,激光雷达的成本也呈下降趋势。谷歌的第一辆无人驾驶汽车原型在2012年使用了价值7万美元的激光雷达。2017年,Waymo的工程师宣称他们已经将成本降低了90%。今天,一些顶级的激光雷达制造商,如卢米纳尔提供自动驾驶等级激光雷达低于1000美元。
为什么支持摄像头?
除了价格和颜色和标志识别之外,摄像头的优势更为微妙。激光雷达如何识别行人正低头看手机,可能在街上闲逛?激光雷达能区分塑料袋和障碍物吗?激光雷达能识别一个骑自行车的人正要进入一个新的车道吗?这些问题的答案是否定的。所以一些激光雷达的反对者认为,一旦摄像头传感器变得完美,激光雷达就会过时。
2020年特斯拉汽车正面中程摄像头拍摄的照片
图片由特斯拉提供
摄像头占据主导地位的关键障碍是人工智能,它能够读取和解释大量的数据,而且必须在几毫秒内识别出各种情况。这有助于解释当前流行的观点,即最好的选择是混合使用激光雷达优越的视觉和摄像头的颜色、物体和文本识别,以获得周围环境的清晰图像。值得注意的是,这种解决方案的计算量也很大,当然依赖于人类编写的算法。
在这场争论中,本质上是激光雷达的成本曲线和AI程序员的成本曲线的一场竞赛。如果激光雷达达更快的达到了一个接受的价格,那么它可以成为真正地可用的可靠的普遍的廉价的且非常准确的距离传感器。至少与摄像头结合起来的方案是可行的。虽然在未来激光雷达可能不是绝对必要的,它的可靠性,简单性和普遍性可以使它成为一个达到L5非常有吸引力的跳板。然而,也不排除特斯拉或其他人成功地在不久的将来创造一个复杂的神经网络能够快速、可靠地处理摄像头的成像信息。
所以,激光雷达和摄像头,军备竞赛开始了。
- 下一篇:基于当前环境问题的汽车技术发展趋势
- 上一篇:基于赛车序列式变速箱的气动换挡系统设计



编辑推荐




最新资讯
-
imc/GRAS/AP首次联袂亮相ATE India 盛会
2025-04-11 13:49
-
GB/T 31486-2024 与 GB/T 31484-2015 修改
2025-04-11 13:48
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
