




 广告
广告





















































面向未来汽车电子电气架构的域控制器平台
2020-08-09 22:52:05· 来源:联合汽车电子有限公司 作者:刘佳熙,丁锋

电动化、智能化、网联化、共享化已经成为汽车产业公认的未来发展方向,而软件是使能未来汽车四化的技术核心之一。车载软件将不再仅用于控制机电设备,而将用于实
电动化、智能化、网联化、共享化已经成为汽车产业公认的未来发展方向,而软件是使能未来汽车“四化”的技术核心之一。车载软件将不再仅用于控制机电设备,而将用于实现先进创新功能,包括自动驾驶、网联功能和未来出行方式等。
汽车电子电气架构必须支撑未来汽车“四化”和车载软件的快速发展,为此必须满足的基本需求包括高计算性能、高通讯带宽、高功能安全性、高信息安全性、软件持续更新等。然而,当前采用的分布式汽车电子电气架构存在计算能力不足、通讯带宽不足、不便于软件升级等瓶颈,不能满足未来需求。汽车电子电气架构将发生重大革新,基于软件集中化和域控制器的集中式电子电气架构将成为未来汽车电子电气架构的发展方向。
支持集中式电子电气架构和域控制器的相关技术已经具备,包括车规级微处理器芯片、车载以太网等。领先汽车厂商已经在下一代车型中布局集中式电子电气架构和域控制器,以实现汽车“四化”和使能软件创新。然而在实际应用中,仍然存在域控制器概念不一致,基于域控制器电子电气架构初期成本较高等问题。本文首先阐述集中式电子电气架构的必要性和域控制器概念;其次介绍集中式电子电气架构可行方案;最后介绍联合汽车电子有限公司研发的域控制器产品。
1、集中式汽车电子电气架构和域控制器
1.1集中式电子电气架构的必要性
汽车电动化、智能化、网联化和共享化对汽车电子电气系统提出了新的技术挑战与需求。汽车电动化引入了电机、电池、电控等电子电气设备,使系统复杂性上升;在驱动形式方面,纯电动和不同拓扑结构的混合动力共同发展;以上两点结合终端客户的个性化需求,大幅增加了未来汽车变形开发需求,汽车企业需要有效的变形管理,降低变形开发的成本。汽车智能化面向自动驾驶的实现,摄像头和雷达等环境传感器的信息传递需要高通讯带宽;信息的处理和融合需要较高计算能力;另外,车辆运动控制系统需要跨功能域的总体协调控制。汽车网联化将使终端客户对车辆功能的预期发生改变,更趋向于消费电子的经验,期望快速的功能更新和升级。汽车共享化改变了商业模式和汽车的拥有模式,运营商需要车队管理和云端控制,需要智能化的车辆状态监控和维护,这也需要较高的计算能力。
以上汽车“四化”对汽车电子电气系统的需求可以总结为:有效的变形管理,高计算性能,高通讯性能,有效的跨域功能协调和软件持续更新升级。另外,汽车“四化”的功能很大程度上依靠软件实现,软件驱动创新是未来汽车“四化”的核心。当前汽车采用分布式汽车电子电气架构,如图1所示,该架构在计算性能、通讯带宽、变形管理和支持跨域功能等方面均存在瓶颈。另外,由于以高度嵌入式控制器为主,硬件与软件高度集成,在车辆批产后软件难以升级,较难支持软件创新。集中式电子电气架构通过域控制器和以太网提供了未来汽车所需的计算能力和通讯能力;将车辆层级软件集中于域控制器,并标准化高度嵌入式控制器,更好的支持变形管理和跨域功能;由于实现了更好的硬件抽象,该架构更好的支持了软件创新和软件持续更新升级。
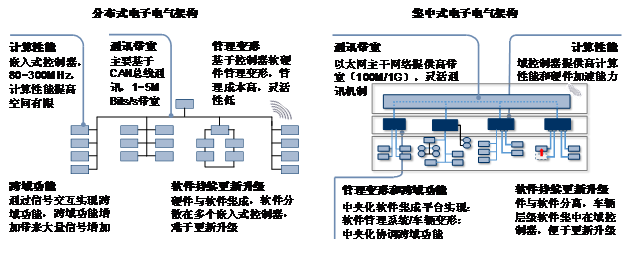
图1 分布式电子电气架构与集中式电子电气架构对比
1.2域控制器概念
对于集中化电子电气架构发展趋势,目前国内汽车业界已经基本形成共识,但对于域控制器的概念,目前尚未有一致定义。关于域控制器概念一般有两种理解:一种理解是特定功能域内高度嵌入式控制器的集成;另一种理解是特定功能域内整车层级软件功能的集中化。我们认为域控制器主要支持特定功能域内整车层级软件的集中化,关于域内高度嵌入式控制器是否与域控制器硬件集成,则应根据整车谱系的总体电子电气架构需求而设计,主要理由如下:
第一,将整车层级软件集中于域控制器,减少了协调控制各部件所需要的总线信号通讯,有利于跨功能域协调控制的实现,避免了未来跨域功能大幅增加可能带来的系统复杂度失控。
第二,整车层级软件协调控制各部件,实现用户易感知的车辆层功能,该部分软件更新和升级需求较多,集中在域控制器中有利于软件升级管理。并且域控制器内可预留计算、存储和通讯资源,用于在车辆批产后,通过软件增加车辆功能。
第三,通过高度嵌入式控制器接口的标准化,将其抽象为标准化传感器或执行器,有利于高度嵌入式控制器在车型谱系间的整体重用。域控制器和标准化传感器、执行器控制器的组合实现了更好的硬件抽象,有利于变形管理和部件复用,通过降低变形开发费用和提高部件安装率降低成本。
在整车层级软件集中于域控制器的基础上,将域内高度嵌入式控制器与域控制器硬件集成,可以降低单个控制器的物料成本,然而提高了变形开发的可能性。因此需要根据整车谱系的总体电子电气架构需求,根据装机量等需求进行总体设计。
2、集中式汽车电子电气架构方案
未来集中式汽车电子电气架构将分为三层,如图2所示,顶层为云计算服务平台,中层为车载计算控制平台(即域控制器),下层为机电一体化的标准化执行器、传感器控制器。业界一般将汽车电子电气系统分为五个功能域,分别是动力总成域、底盘域、车身域、信息娱乐域和辅助/自动驾驶域,因此中层的计算与控制包括五个域的主控和以太网通讯、无线通讯共七个元素。根据这七个元素在具体硬件上的分配以及底层执行器、传感器控制器的具体设计,集中式电子电气架构有不同方案。
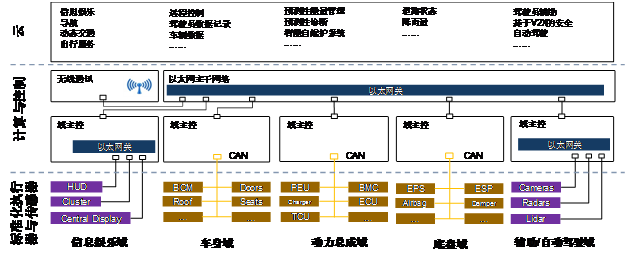
图2 未来汽车电子电气架构构成
2.1基于功能域的集中化方案
基于功能域的集中化方案即为每个功能域设置一个域控制器,域控制器之间通过以太网关进行连接。功能域内的车辆层级功能和域内顶层协调控制功能集中于域控制器中。
域控制器可分为性能型域控制器和集成型域控制器两种。性能型域控制器具有特定的硬件以支持高性能计算,该特定硬件称之为硬件加速器。信息娱乐域控制器需要硬件加速器以驱动显示,属于性能型域控制器。自动驾驶域控制器需要硬件加速器进行图像处理和深度学习计算,也属于性能型域控制器。由于性能型域控制器是实现特定功能的必备条件,且相对于分布式架构,在相同功能情况下可降低成本,所以信息娱乐域和自动驾驶域采用基于功能域的集中化域控制器已成为明显趋势。
面向动力总成域、底盘域和车身域的域控制器属于集成型域控制器,该类域控制器提供通用的计算和通讯资源,以及标准化的软件创新平台,相对于性能型域控制器计算能力较低,但灵活性和开放程度较高。集成型域控制器主要为面向智能网联的创新型软件功能提供平台,支持软件更新与升级。然而针对动力总成域、底盘域和车身域均设置域控制器的方案,由于域控制器是新增成本,在底层标准化执行器、传感器控制器未通过标准化使成本下降的前提下,整车电子电气系统物料成本上升,该方案在现阶段较难在所有整车企业推广。
2.2域融合集中化方案
一种既实现集中化方案,又不导致整车电子电气系统物料成本大幅增加的方案是域融合集中化方案,即将两个或多个集成型域控制器合并为一个的方案。根据域融合的深度,可行的方案如图3a所示,包括如下:
动力总成域与底盘域融合为车辆运动域控制器。由于动力总成域和底盘域之间存在较多的协同控制,在智能汽车背景下,未来协调控制功能仍将大幅增加。这两个域的功能安全和信息安全级别要求相似,可以合并到一个域控制器。
更进一步,运动域控制器可与网关融合,并集成车身域中央控制功能,成为车辆层级的集成型域控制器,或称车辆计算机。由于相应功能域的安全等级要求不同,此种深程度域融合需要硬件虚拟化技术支持,以防止不同安全等级功能间的相互影响。
另外,如果 L1和L2驾驶辅助功能成为标准配置,也可融合到车辆运动域控制器中,而非标准配置的高等级自动驾驶采用独立的域控制器。高等级自动驾驶需要控制器备份功能,在主控制器功能失效时,备份功能仍能保证车辆继续安全的自动驾驶一段时间,该备份功能也可融合到运动域控制器中。
由于高级辅助和自动驾驶、软件无线升级等功能需要域控制器的存在,以上域融合方案在同等功能下较少或没有增加整车电子电气系统的成本,是可行的方案。必须说明的是,通过域融合可以降低成本,但过度融合的方案可能并不可行。例如无线通讯和自动驾驶控制器,由于两者信息安全和功能安全要求差距较大,如没有合适的技术方案支持,应避免融合在一个域控制器中。
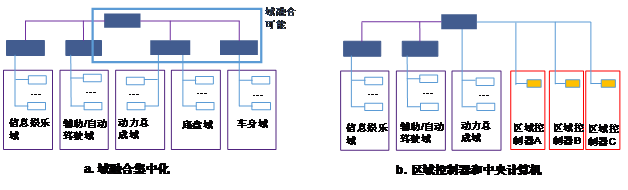
图3 具有成本优势的集中化方案
2.3基于区域控制器和中央计算机的集中化方案
在基于功能域的集中化方案和域融合集中化方案中,位于如图2底层的控制器采用以功能为导向的高度嵌入式控制器方案。多数嵌入式控制器仍将作为执行器、传感器控制器的角色继续存在与电子电气架构中,其接口将被标准化以实现较好的硬件抽象,通过提高装机量来降低成本。
区域控制器是一种新的控制器概念,它不再以功能为导向划分控制器的边界,而是以车辆特定物理区域为导向定义控制器,例如车辆前区域控制器、左区域控制器、右区域控制器,控制和驱动该区域内的部件。采用区域控制器可以从两个方面降低电子电气架构的成本,一是将该区域内的功能型控制器集成入区域控制器,二是由于区域控制器采用就近接线,减少了车辆的线束成本。如图3b所示,区域控制器配合中央计算机,在实现集中化需求的同时,可保持整车物料成本平衡。
根据调研和分析,我们认为并非所有控制器均适合整合为区域控制器。适合整合为区域控制器的功能主要为离散逻辑和非时间敏感功能,例如电源分配、车身控制、热管理和空调管理等;不适合整合为区域控制的功能主要为带有复杂逻辑或零部件、需要实时控制的功能,例如发动机管理、电机控制、车辆稳定性控制等。关于中央计算机,根据2.2中讨论,在架构中将具有不只一个计算机,如图3b所示,应当根据汽车企业的车型谱系整体设计电子电气架构。
3、域控制器(XCU)产业化方案
联合汽车电子有限公司面向未来集中化电子电气架构,已经开发了扩展型域控制器平台(XCU: eXtended domain Control Unit),将在2020年实现量产。XCU适合于未来域(融合)集中化电子电气架构中具有高安全要求的域控制器,同时适合基于区域控制器和中央计算机的集中化方案中的中央计算机方案。
目前正在研发的XCU8.0控制器软硬件架构如图4所示,产品具有如下技术参数:
采用双核心设计,包括高性能车用多核微处理器芯片(MPU)和高安全性能微控制器芯片(MCU),将计算性能提高到10~28kDMIPS的同时,具有满足ASIL D功能安全等级的能力。
搭载车规级以太网芯片,支持多路CAN/CANFD通讯接口。
MPU采用遵循AUTOSAR Adaptive标准的开放式软件平台;MCU采用遵循AUTOSAR Classic标准的软件平台,支持集成安全控制功能。
支持先进车用信息技术和ASIL D功能安全等级。

图4 XCU软件和硬件架构
XCU面向未来汽车电子电气架构而设计,作为高计算性能和安全性能的域控制器平台,可提供基于IT技术的、标准化的软件创新平台,使能和加速汽车软件创新,帮助整车客户实现基于智能网联,对车辆和动力系统功能进行全局性优化、数据利用。XCU提供控制器端信息安全和远程刷新方案,可支持通过软件更新和升级,提升车辆性能和终端客户功能体验。
4、结论
为实现汽车电动化、智能化、网联化和共享化,汽车电子电气架构将发生重大革新,集中化电子电气架构将成为主流解决方案。在未来汽车电子电气架构中,域控制器作为整车层级软件功能集成平台,主要面向整车层级软件的集中化和支持智能网联软件创新。在实现集中化的同时控制电子电气系统成本,域融合架构方案、基于区域控制器和中央计算机的方案是可行方案。面向未来汽车电子电气架构发展,联合汽车电子有限公司开发了扩展型域控制器平台XCU,并将实现产业化,可为客户实现汽车“四化”提供助力。
汽车电子电气架构必须支撑未来汽车“四化”和车载软件的快速发展,为此必须满足的基本需求包括高计算性能、高通讯带宽、高功能安全性、高信息安全性、软件持续更新等。然而,当前采用的分布式汽车电子电气架构存在计算能力不足、通讯带宽不足、不便于软件升级等瓶颈,不能满足未来需求。汽车电子电气架构将发生重大革新,基于软件集中化和域控制器的集中式电子电气架构将成为未来汽车电子电气架构的发展方向。
支持集中式电子电气架构和域控制器的相关技术已经具备,包括车规级微处理器芯片、车载以太网等。领先汽车厂商已经在下一代车型中布局集中式电子电气架构和域控制器,以实现汽车“四化”和使能软件创新。然而在实际应用中,仍然存在域控制器概念不一致,基于域控制器电子电气架构初期成本较高等问题。本文首先阐述集中式电子电气架构的必要性和域控制器概念;其次介绍集中式电子电气架构可行方案;最后介绍联合汽车电子有限公司研发的域控制器产品。
1、集中式汽车电子电气架构和域控制器
1.1集中式电子电气架构的必要性
汽车电动化、智能化、网联化和共享化对汽车电子电气系统提出了新的技术挑战与需求。汽车电动化引入了电机、电池、电控等电子电气设备,使系统复杂性上升;在驱动形式方面,纯电动和不同拓扑结构的混合动力共同发展;以上两点结合终端客户的个性化需求,大幅增加了未来汽车变形开发需求,汽车企业需要有效的变形管理,降低变形开发的成本。汽车智能化面向自动驾驶的实现,摄像头和雷达等环境传感器的信息传递需要高通讯带宽;信息的处理和融合需要较高计算能力;另外,车辆运动控制系统需要跨功能域的总体协调控制。汽车网联化将使终端客户对车辆功能的预期发生改变,更趋向于消费电子的经验,期望快速的功能更新和升级。汽车共享化改变了商业模式和汽车的拥有模式,运营商需要车队管理和云端控制,需要智能化的车辆状态监控和维护,这也需要较高的计算能力。
以上汽车“四化”对汽车电子电气系统的需求可以总结为:有效的变形管理,高计算性能,高通讯性能,有效的跨域功能协调和软件持续更新升级。另外,汽车“四化”的功能很大程度上依靠软件实现,软件驱动创新是未来汽车“四化”的核心。当前汽车采用分布式汽车电子电气架构,如图1所示,该架构在计算性能、通讯带宽、变形管理和支持跨域功能等方面均存在瓶颈。另外,由于以高度嵌入式控制器为主,硬件与软件高度集成,在车辆批产后软件难以升级,较难支持软件创新。集中式电子电气架构通过域控制器和以太网提供了未来汽车所需的计算能力和通讯能力;将车辆层级软件集中于域控制器,并标准化高度嵌入式控制器,更好的支持变形管理和跨域功能;由于实现了更好的硬件抽象,该架构更好的支持了软件创新和软件持续更新升级。
图1 分布式电子电气架构与集中式电子电气架构对比
1.2域控制器概念
对于集中化电子电气架构发展趋势,目前国内汽车业界已经基本形成共识,但对于域控制器的概念,目前尚未有一致定义。关于域控制器概念一般有两种理解:一种理解是特定功能域内高度嵌入式控制器的集成;另一种理解是特定功能域内整车层级软件功能的集中化。我们认为域控制器主要支持特定功能域内整车层级软件的集中化,关于域内高度嵌入式控制器是否与域控制器硬件集成,则应根据整车谱系的总体电子电气架构需求而设计,主要理由如下:
第一,将整车层级软件集中于域控制器,减少了协调控制各部件所需要的总线信号通讯,有利于跨功能域协调控制的实现,避免了未来跨域功能大幅增加可能带来的系统复杂度失控。
第二,整车层级软件协调控制各部件,实现用户易感知的车辆层功能,该部分软件更新和升级需求较多,集中在域控制器中有利于软件升级管理。并且域控制器内可预留计算、存储和通讯资源,用于在车辆批产后,通过软件增加车辆功能。
第三,通过高度嵌入式控制器接口的标准化,将其抽象为标准化传感器或执行器,有利于高度嵌入式控制器在车型谱系间的整体重用。域控制器和标准化传感器、执行器控制器的组合实现了更好的硬件抽象,有利于变形管理和部件复用,通过降低变形开发费用和提高部件安装率降低成本。
在整车层级软件集中于域控制器的基础上,将域内高度嵌入式控制器与域控制器硬件集成,可以降低单个控制器的物料成本,然而提高了变形开发的可能性。因此需要根据整车谱系的总体电子电气架构需求,根据装机量等需求进行总体设计。
2、集中式汽车电子电气架构方案
未来集中式汽车电子电气架构将分为三层,如图2所示,顶层为云计算服务平台,中层为车载计算控制平台(即域控制器),下层为机电一体化的标准化执行器、传感器控制器。业界一般将汽车电子电气系统分为五个功能域,分别是动力总成域、底盘域、车身域、信息娱乐域和辅助/自动驾驶域,因此中层的计算与控制包括五个域的主控和以太网通讯、无线通讯共七个元素。根据这七个元素在具体硬件上的分配以及底层执行器、传感器控制器的具体设计,集中式电子电气架构有不同方案。
图2 未来汽车电子电气架构构成
2.1基于功能域的集中化方案
基于功能域的集中化方案即为每个功能域设置一个域控制器,域控制器之间通过以太网关进行连接。功能域内的车辆层级功能和域内顶层协调控制功能集中于域控制器中。
域控制器可分为性能型域控制器和集成型域控制器两种。性能型域控制器具有特定的硬件以支持高性能计算,该特定硬件称之为硬件加速器。信息娱乐域控制器需要硬件加速器以驱动显示,属于性能型域控制器。自动驾驶域控制器需要硬件加速器进行图像处理和深度学习计算,也属于性能型域控制器。由于性能型域控制器是实现特定功能的必备条件,且相对于分布式架构,在相同功能情况下可降低成本,所以信息娱乐域和自动驾驶域采用基于功能域的集中化域控制器已成为明显趋势。
面向动力总成域、底盘域和车身域的域控制器属于集成型域控制器,该类域控制器提供通用的计算和通讯资源,以及标准化的软件创新平台,相对于性能型域控制器计算能力较低,但灵活性和开放程度较高。集成型域控制器主要为面向智能网联的创新型软件功能提供平台,支持软件更新与升级。然而针对动力总成域、底盘域和车身域均设置域控制器的方案,由于域控制器是新增成本,在底层标准化执行器、传感器控制器未通过标准化使成本下降的前提下,整车电子电气系统物料成本上升,该方案在现阶段较难在所有整车企业推广。
2.2域融合集中化方案
一种既实现集中化方案,又不导致整车电子电气系统物料成本大幅增加的方案是域融合集中化方案,即将两个或多个集成型域控制器合并为一个的方案。根据域融合的深度,可行的方案如图3a所示,包括如下:
动力总成域与底盘域融合为车辆运动域控制器。由于动力总成域和底盘域之间存在较多的协同控制,在智能汽车背景下,未来协调控制功能仍将大幅增加。这两个域的功能安全和信息安全级别要求相似,可以合并到一个域控制器。
更进一步,运动域控制器可与网关融合,并集成车身域中央控制功能,成为车辆层级的集成型域控制器,或称车辆计算机。由于相应功能域的安全等级要求不同,此种深程度域融合需要硬件虚拟化技术支持,以防止不同安全等级功能间的相互影响。
另外,如果 L1和L2驾驶辅助功能成为标准配置,也可融合到车辆运动域控制器中,而非标准配置的高等级自动驾驶采用独立的域控制器。高等级自动驾驶需要控制器备份功能,在主控制器功能失效时,备份功能仍能保证车辆继续安全的自动驾驶一段时间,该备份功能也可融合到运动域控制器中。
由于高级辅助和自动驾驶、软件无线升级等功能需要域控制器的存在,以上域融合方案在同等功能下较少或没有增加整车电子电气系统的成本,是可行的方案。必须说明的是,通过域融合可以降低成本,但过度融合的方案可能并不可行。例如无线通讯和自动驾驶控制器,由于两者信息安全和功能安全要求差距较大,如没有合适的技术方案支持,应避免融合在一个域控制器中。
图3 具有成本优势的集中化方案
2.3基于区域控制器和中央计算机的集中化方案
在基于功能域的集中化方案和域融合集中化方案中,位于如图2底层的控制器采用以功能为导向的高度嵌入式控制器方案。多数嵌入式控制器仍将作为执行器、传感器控制器的角色继续存在与电子电气架构中,其接口将被标准化以实现较好的硬件抽象,通过提高装机量来降低成本。
区域控制器是一种新的控制器概念,它不再以功能为导向划分控制器的边界,而是以车辆特定物理区域为导向定义控制器,例如车辆前区域控制器、左区域控制器、右区域控制器,控制和驱动该区域内的部件。采用区域控制器可以从两个方面降低电子电气架构的成本,一是将该区域内的功能型控制器集成入区域控制器,二是由于区域控制器采用就近接线,减少了车辆的线束成本。如图3b所示,区域控制器配合中央计算机,在实现集中化需求的同时,可保持整车物料成本平衡。
根据调研和分析,我们认为并非所有控制器均适合整合为区域控制器。适合整合为区域控制器的功能主要为离散逻辑和非时间敏感功能,例如电源分配、车身控制、热管理和空调管理等;不适合整合为区域控制的功能主要为带有复杂逻辑或零部件、需要实时控制的功能,例如发动机管理、电机控制、车辆稳定性控制等。关于中央计算机,根据2.2中讨论,在架构中将具有不只一个计算机,如图3b所示,应当根据汽车企业的车型谱系整体设计电子电气架构。
3、域控制器(XCU)产业化方案
联合汽车电子有限公司面向未来集中化电子电气架构,已经开发了扩展型域控制器平台(XCU: eXtended domain Control Unit),将在2020年实现量产。XCU适合于未来域(融合)集中化电子电气架构中具有高安全要求的域控制器,同时适合基于区域控制器和中央计算机的集中化方案中的中央计算机方案。
目前正在研发的XCU8.0控制器软硬件架构如图4所示,产品具有如下技术参数:
采用双核心设计,包括高性能车用多核微处理器芯片(MPU)和高安全性能微控制器芯片(MCU),将计算性能提高到10~28kDMIPS的同时,具有满足ASIL D功能安全等级的能力。
搭载车规级以太网芯片,支持多路CAN/CANFD通讯接口。
MPU采用遵循AUTOSAR Adaptive标准的开放式软件平台;MCU采用遵循AUTOSAR Classic标准的软件平台,支持集成安全控制功能。
支持先进车用信息技术和ASIL D功能安全等级。
图4 XCU软件和硬件架构
XCU面向未来汽车电子电气架构而设计,作为高计算性能和安全性能的域控制器平台,可提供基于IT技术的、标准化的软件创新平台,使能和加速汽车软件创新,帮助整车客户实现基于智能网联,对车辆和动力系统功能进行全局性优化、数据利用。XCU提供控制器端信息安全和远程刷新方案,可支持通过软件更新和升级,提升车辆性能和终端客户功能体验。
4、结论
为实现汽车电动化、智能化、网联化和共享化,汽车电子电气架构将发生重大革新,集中化电子电气架构将成为主流解决方案。在未来汽车电子电气架构中,域控制器作为整车层级软件功能集成平台,主要面向整车层级软件的集中化和支持智能网联软件创新。在实现集中化的同时控制电子电气系统成本,域融合架构方案、基于区域控制器和中央计算机的方案是可行方案。面向未来汽车电子电气架构发展,联合汽车电子有限公司开发了扩展型域控制器平台XCU,并将实现产业化,可为客户实现汽车“四化”提供助力。



编辑推荐




最新资讯
-
奇石乐推出用于DAQ数据采集系统的KiStudio
2025-04-28 17:51
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
