




 广告
广告





















































ADAS系统对实际驾驶路面的偏移控制优化
2020-08-14 15:46:52· 来源:焉知自动驾驶 作者:Aimee

目前上市的自动驾驶辅助车型中,相当一部分已经搭载了自动驾驶二级横向控制系统,由于该系统完全由自动驾驶系统控制横向偏移量,故需要建立与转向控制系统EPS之
目前上市的自动驾驶辅助车型中,相当一部分已经搭载了自动驾驶二级横向控制系统,由于该系统完全由自动驾驶系统控制横向偏移量,故需要建立与转向控制系统EPS之间的控制连接。而当前上市的自动驾驶车型中针对横向控制这一功能抱怨点坡多,主要体现在如下几个方面:
1)横向控制不稳定,相同道路容易受到颠簸、滑移等影响严重,出现跑偏或方向盘来回摆动;
2)横向控制能力不足,不同道路曲率下过弯道,常出现过弯能力不足,信心感不强;
3)颠簸、滑移的路面行驶过程中,容易导致目标误识别、漏识别甚至突然丢失后导致ACC快速异常退出;
容易出现如上情况的场景统计示意图如下:
对于以上情况,通过排查发现主要由以下原因:
1)车辆动力学影响车道检测精度
在表面不稳定的情况下,自我运动行为将发生变化,例如偏航率突然跳跃,这将导致对车道边界的跟踪不正确。由于基于车道边界属性计算了控制扭矩,因此可以在短时间内改变横向偏差和曲率,可能会发生控制转矩的变化。

2)道路摩擦力影响扭矩响应
如果在不稳定的路面上行驶,特别是在高速行驶时,车辆会有跳动的趋势,在跳动过程中,地面摩擦力会大大降低,在这种情况下,转向系统对相同控制扭矩的反作用将改变。通常,在摩擦力减小之后,转向系统将产生更大的方向盘角度。相同的扭矩控制下的车辆可能会发生运动状态的突然变化。

3)轮胎附着力
在不稳定的路面上行驶时,道路可能会对车轮产生作用力,这意味着,如果路面不平坦,车轮力将导致车轮角度改变,车轮角度将导致方向盘角度改变,此时道路将推动车轮分别从内部和外部产生不同程度的滑移。这种行为在没有配备EPS的旧车中非常流行,由于EPS阻尼逻辑,这种行为可以大大减少,但仍然存在。在车道对中控制期间,EPS助力性能与通常不同,侧向控制扭矩将与方向盘反作用力重叠,这可能会导致驾驶员对方向盘控制需要更大的作用力。

从执行器方面推荐相关性能提升措施
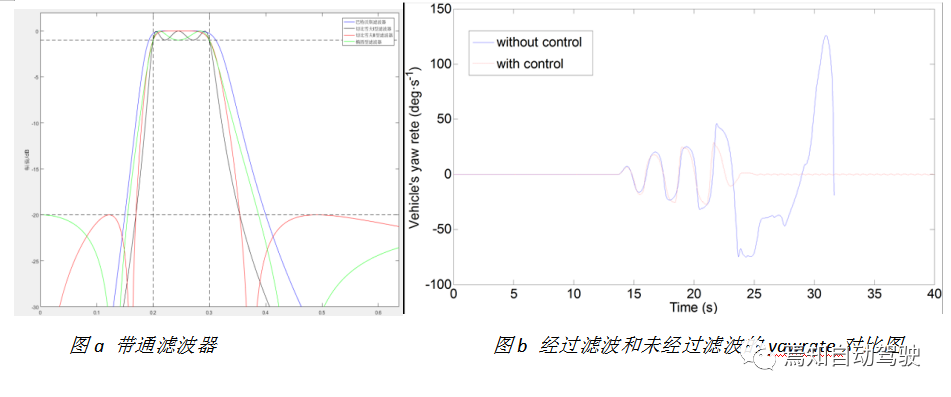
1、对偏航率Yawrate进行滤波处理
由于输入的偏航率由于地面坑洼出现跳变时影响自车对目标的识别判断,对于由于路面引起的颠簸导致的偏航率变化一般属于高斯白噪声,可以根据先前前一时刻检测到的可用yawrate附件偏移量设置一个简单的带通滤波器,当某一时刻由于路面颠簸导致yawrate值出现突变时,就会由于将该yawrate输入带通滤波器,对于通带内的yawrate信号才认为满足要求,将其保留下来,从而去除滤波颠簸的毛刺,以做到平滑yawrate的目的。
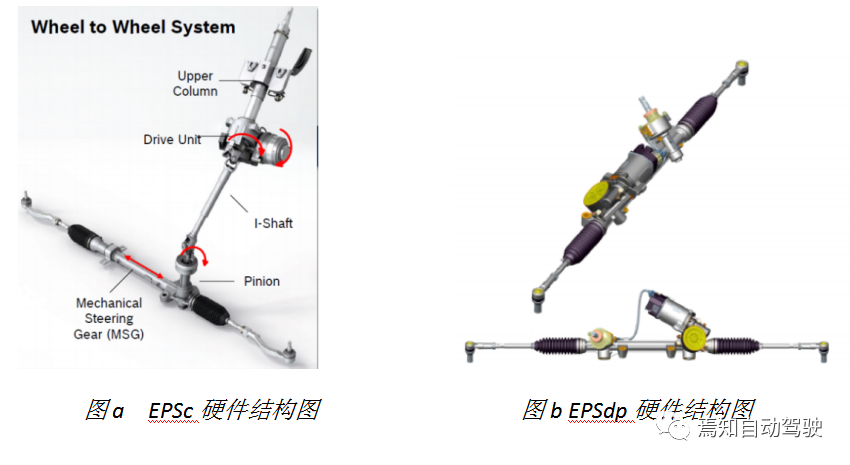
2、推荐采用小齿轮式EPSdp代替转向柱式EPSc
转向柱式电动助力转向“EPSc”是一种机电一体化的新一代汽车智能助力转向装置。助力电机直接在转向柱上施加助力,在不同车况下汽车转向时,它通过电子控制装置,使转向助力电机产生所需的辅助力。小齿轮式EPSdp是电机直接将助力加在齿条上,通过EPS辅助单元与齿条轴的一体化,提高了轻量化及装配紧密性。从体系结构中可以很容易地看出,系统电源应当通过EPSc的整个I型轴,极大地增加了传输延迟(〜150ns),而EPSc由于传输时间长于EPSdp,导致EPSc的反应也比EPSdp慢,则其性能将无法与EPSdp相比较。
在颠簸路面控制过程中产生基本行驶问题的原因是EPS响应ADAS输出的扭矩请求超调了,而为了获得更好的性能,其EPS响应驾驶员的扭矩输出应该更小,从而与路面影响结果叠加后不会产生超调或抖动。
因此在EPS响应过程中需要充分考虑如下要素:
1)为了减少反应时间延迟期→需要更高的扭矩增益;
2)为了提升车辆稳定性和优化驾驶员的手感→需要降低扭矩增益;
基于现有车辆的性能,没有解决方案可以同时优化两者。从技术上讲,也没有解决方案可以实现基于EPS架构的完美性能,我们的建议是:
1)增加增益因子作为转向扭矩响应的补充,以达到最优的横向控制性能;
2)通过标定平衡数据,满足让大多数的驾驶员无抱怨;
3、改善EPS阻尼
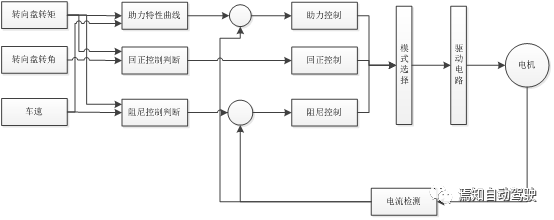
当前EPS最常见的控制策略有三种,分别是助力控制、回正控制、阻尼控制。助力控制是最基本的控制策略,当ADAS系统判断需要进行转向时,EPS提供辅助的转向力矩,帮助系统完成转向。回正控制是通过检测驾驶员作用的转矩大小和方向盘转角及其运动状态来判断汽车是否在回正状态,一旦进入符合回正条件,就进行回正控制,让转向盘快速准确地回到中间位置。阻尼控制主要是针对高速工况,阻尼控制保证汽车直线行驶的稳定性,改善道路颠簸带来的抖动感。
EPS阻尼逻辑将对控制产生很大影响,如果阻尼性能更强,则车辆转向会更稳定。但事实阻尼过大对于驾驶员手力控制感也会产生相应的影响。为了提升转向稳定性,防止振荡,EPS的阻尼逻辑应做如下两个方面的策略调整:
1)阻尼做随速控制
由于汽车行驶时车速是一个变化量,车速的变化就要求不断进行阻尼与助力控制的切换。为此,阻尼力矩应随车速增大而增大,以增加驾驶员的手感。同时,需要考虑考虑三个主要问题:一是为了满足避障的紧急行驶工况,阻尼力不能太大,二是为了满足高速行驶稳定性,给驾驶员足够的行驶感,阻尼力不能太小,三是为了满足全车速转向中手感平顺,要解决在助力和阻尼切换中的平滑过渡。
2)改进助力特性曲线
为了衰减路面的冲击,阻尼控制要体现削弱抖动的功能,这就基于ADAS期望的转向力矩基础上,改进设计助力特性曲线。
从ADAS系统控制器推荐相关性能提升措施
当然,除了从执行器方面寻找“颠簸”路面对ADAS响应影响的解决措施,也可以从ADAS系统控制器中寻找相关解决措施。
1、采用嵌套PID控制转向扭矩的发出。
如下图所示,采用不同的PID对ADAS系统输入的值进行局部控制,针对相应的不同的结果反馈到输入端进行局部调节,一部分是ADAS系统将发出扭矩值(set Value requirement)需求发送给辅助扭矩决策器(Assistance torque determination),通过滤波(limiter)处理后输出局部设置值给EPS进行响应。另一部分通过第一步中的决策响应值对输入调节增益,从而抑制车身转向抖动,最终通过限流器确保输出扭矩稳定性。
2、使用角度代替扭矩
当前大部分ADAS发出控制转向请求都是采用了扭矩形式,而转向角度(方向盘角度或轮向角度),与反作用力和摩擦力无关,EPS控制执行到位的转向角度才可以表示出最终的转向状态,因此对于系统所期望的最终状态采用转向角形式可以直接进行控制,除了感知问题外,其他执行问题均可以消除。
当然用角度代替扭矩也会有另外一个问题就是其在ADAS角度控制期间,驾驶员如果想要进行超越从系统中取回驾驶控制权,会存在手感发硬或无法及时接管的情况,后续我们会专门针对这一ADAS驾驶控制中的缺陷解决方案做详细介绍。
总结
当前自动驾驶开发过程中已经开始使用较好的工具对实际驾驶环境及道路状态进行仿真测试,以便提前规避很多环境因素对驾驶控制造成的不稳定性,然而,对于实际路面颠簸,滑移、临时上下坡等还没办法做到很好的问题规避及管控,这就造成了在售后市场出现各种由于驾驶路面环境对车辆不稳定性产生的抱怨。
- 下一篇:自动驾驶硬件之线控底盘
- 上一篇:宁德时代都有哪些黑科技?



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
