




 广告
广告





















































自动驾驶能实现吗?西门子给您靠谱的选择
2020-08-21 23:45:42· 来源:西门子数字化工业软件

十几年前,自动驾驶还只是科幻电影中的桥段,现如今,无论是传统汽车厂商还是高科技巨头,都在争先恐后地将幻想变成现实。当自动驾驶重新定义我们拥有和使用汽车
十几年前,自动驾驶还只是科幻电影中的桥段,现如今,无论是传统汽车厂商还是高科技巨头,都在争先恐后地将“幻想”变成“现实”。
当自动驾驶重新定义我们拥有和使用汽车的方式,它同样也将改变车辆工程的设计开发。试想一下,如果未来的某一天要让数百万人通过车辆控制系统支配的城市交通出行,那么这种系统的构造方式一定是安全、稳定、高可靠的。西门子PLM正在打破这一挑战。
三大挑战掣肘自动驾驶车辆开发
“道路千万条,安全第一条。”当安全责任从驾驶员转移到汽车制造商身上,这就意味着自动化驾驶系统必须能够预防事故发生,这不仅需要各系统之间、以及与机械、电子和软件构件之间相互集成,而且软件和硬件必须同步开发。
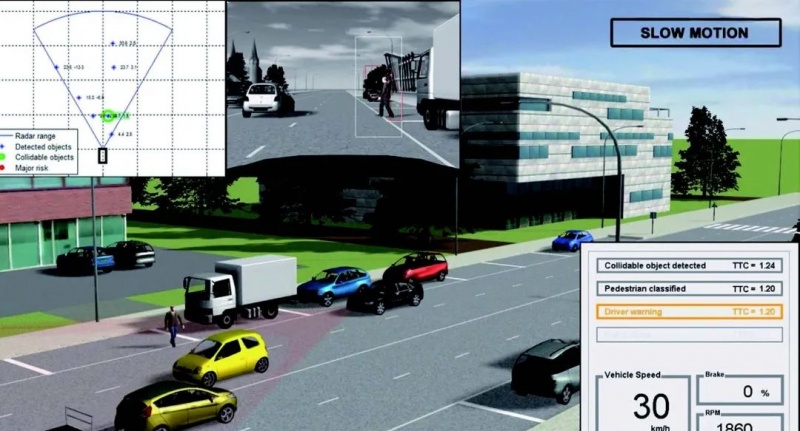
自动驾驶系统的另一个重要变革在于传感器的配置,车载传感器类型、数量和位置的不同组合可以生成车辆周围环境的360度全方位图像。如何确保车辆根据参数配置运转?这就需要进行大量场景测试和验证,通过性能对比来实现设计探索。
最后,车辆开发流程中的设计决策和验证结果必须可追踪。大批量生产中只有最大程度地利用数字化数据才能不断改进产品。
数字化孕育自动驾驶车辆设计重大变革
为了应对种种挑战,西门子PLM建议采用系统驱动型产品开发流程进行自动驾驶车辆工程设计,即通过产品及其在SimcenterTM软件、Teamcenter ®软件和Mentor解决方案中对应的组件形成数字化双胞胎,将数字化工程环境嵌入到自动驾驶车辆生命周期(PLM)架构中,使得大规模设计探索、验证和确认流程成为可能,这是开发共享、自动驾驶移动服务的关键所在。
具体包括七个要素的建模:
1. 芯片系统
特定的芯片系统往往开发周期冗长,晶片成本高昂,采用西门子Mentor解决方案,可以将芯片设计探索、未来系统性能的早期验证与现实计算性能融合起来,还可优化芯片和系统的热和耐久性能。
2. 自动驾驶计算平台
自动驾驶平台将环境因子转换为系统输出的电子信号,使汽车遵循预期轨迹。Mentor 开发的 DRS360 仿真平台,可以实时融合原始未过滤的雷达数据、光探测和测距 (LIDAR)、视线和其他传感器数据,达到 5级自动驾驶车辆无需驾驶员介入即可行车的要求。
3. 嵌入式软件
软件是产品开发过程中的主导因素。Simcenter 嵌入式软件设计器具有统一、集成的模型驱动型软件开发环境,能够管理所有高效建模、测试驱动型车载软件开发构件,高效、灵活的将客户需求转化为市场产品。
4. 算法
各种控制促成了车辆的决策智能。根据控制器接收的输入数据,系统需要决定可行驶区域并选择到达终点的路线。西门子PLM工程服务团队具备模型预测控制、机器学习和深度学习相关的经验和技术,能够为控制算法开发提供支持。
5. 传感器与环境
自动驾驶功能所需的传感器与日俱增,集中式传感器融合架构发展也推动了这一增长。Simcenter 解决方案让用户可以根据各种真实环境对传感器进行建模,包括从控制算法开发的实况传感器模型支持,到高频电磁雷达模型,以及基于物理场的摄像头模型。
6. 车辆与乘员
Simcenter 囊括最高真实级别的车辆行为仿真和乘员建模解决方案,确保整车性能和乘员安全性。
7.系统集成
将上述七种要素融合到一个大型架构中进行设计探索、验证和确认,是西门子PLM 对于汽车行业所面临一系列挑战所给出的答案。
当自动驾驶重新定义我们拥有和使用汽车的方式,它同样也将改变车辆工程的设计开发。试想一下,如果未来的某一天要让数百万人通过车辆控制系统支配的城市交通出行,那么这种系统的构造方式一定是安全、稳定、高可靠的。西门子PLM正在打破这一挑战。
三大挑战掣肘自动驾驶车辆开发
“道路千万条,安全第一条。”当安全责任从驾驶员转移到汽车制造商身上,这就意味着自动化驾驶系统必须能够预防事故发生,这不仅需要各系统之间、以及与机械、电子和软件构件之间相互集成,而且软件和硬件必须同步开发。
自动驾驶系统的另一个重要变革在于传感器的配置,车载传感器类型、数量和位置的不同组合可以生成车辆周围环境的360度全方位图像。如何确保车辆根据参数配置运转?这就需要进行大量场景测试和验证,通过性能对比来实现设计探索。
最后,车辆开发流程中的设计决策和验证结果必须可追踪。大批量生产中只有最大程度地利用数字化数据才能不断改进产品。
数字化孕育自动驾驶车辆设计重大变革
为了应对种种挑战,西门子PLM建议采用系统驱动型产品开发流程进行自动驾驶车辆工程设计,即通过产品及其在SimcenterTM软件、Teamcenter ®软件和Mentor解决方案中对应的组件形成数字化双胞胎,将数字化工程环境嵌入到自动驾驶车辆生命周期(PLM)架构中,使得大规模设计探索、验证和确认流程成为可能,这是开发共享、自动驾驶移动服务的关键所在。
具体包括七个要素的建模:
1. 芯片系统
特定的芯片系统往往开发周期冗长,晶片成本高昂,采用西门子Mentor解决方案,可以将芯片设计探索、未来系统性能的早期验证与现实计算性能融合起来,还可优化芯片和系统的热和耐久性能。
2. 自动驾驶计算平台
自动驾驶平台将环境因子转换为系统输出的电子信号,使汽车遵循预期轨迹。Mentor 开发的 DRS360 仿真平台,可以实时融合原始未过滤的雷达数据、光探测和测距 (LIDAR)、视线和其他传感器数据,达到 5级自动驾驶车辆无需驾驶员介入即可行车的要求。
3. 嵌入式软件
软件是产品开发过程中的主导因素。Simcenter 嵌入式软件设计器具有统一、集成的模型驱动型软件开发环境,能够管理所有高效建模、测试驱动型车载软件开发构件,高效、灵活的将客户需求转化为市场产品。
4. 算法
各种控制促成了车辆的决策智能。根据控制器接收的输入数据,系统需要决定可行驶区域并选择到达终点的路线。西门子PLM工程服务团队具备模型预测控制、机器学习和深度学习相关的经验和技术,能够为控制算法开发提供支持。
5. 传感器与环境
自动驾驶功能所需的传感器与日俱增,集中式传感器融合架构发展也推动了这一增长。Simcenter 解决方案让用户可以根据各种真实环境对传感器进行建模,包括从控制算法开发的实况传感器模型支持,到高频电磁雷达模型,以及基于物理场的摄像头模型。
6. 车辆与乘员
Simcenter 囊括最高真实级别的车辆行为仿真和乘员建模解决方案,确保整车性能和乘员安全性。
7.系统集成
将上述七种要素融合到一个大型架构中进行设计探索、验证和确认,是西门子PLM 对于汽车行业所面临一系列挑战所给出的答案。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
