




 广告
广告





















































数字孪生:基于V2C的ADAS系统数字孪生模型
2020-10-12 23:48:07· 来源:轩辕实验室

本文来源:Z. Wang et al., A Digital Twin Paradigm: Vehicle-to-Cloud Based Advanced Driver Assistance Systems, in 2020 IEEE 91st Vehicular Technology C
本文来源:Z. Wang et al., “A Digital Twin Paradigm: Vehicle-to-Cloud based Advanced Driver Assistance Systems,” in 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, May 2020, pp. 1–6.
“ 数字孪生体作为一种新兴的网络物理系统表现形式,近年来受到越来越多的关注。它为实时监视和同步真实世界中的活动与虚拟对等物开辟了道路。这项研究开发了一个数字孪生范式,车载设备利用车载云(V2C)通信,可以通过蜂窝网络将数据上传到服务器。服务器根据接收到的数据创建一个虚拟世界,用数字孪生模型处理数据,然后将处理结果发送回连接的车辆。”
01 数字孪生框架
图1是本研究提出的一个两层框架的联网车辆数字孪生系统。下层代表物理世界,上层代表网络世界。通信模块在这个系统框架中起着至关重要的作用,它是将两个层紧密连接在一起的纽带。在本研究中,将蜂窝通信称为通信模块。

图1:联网车辆的通用数字孪生模型框架
随着时间的推移,在世界坐标系上定义的数字孪生框架的物理层可能包含所有物理实体及其交互作用,包括车辆和组件、驾驶员和乘客、道路基础设施、气象状态、其他道路使用者等。位于这一层的两个关键模块是传感器和执行器。传感器可以检测物理实体的动态状态、操作过程中的变化或事件发生,例如车速、驾驶员的注视和红绿灯状态,并在不同分辨率下汇总测量值。信息通过通信模块传输到网络世界,以便进一步处理。
另一方面,来自网络世界的处理结果被接收(同样通过通信模块),并作为物理世界中实体或过程的驱动指南。物理世界中的连接车辆可以部分或完全自动化(即,作为连接和自动车辆),或者由具有某些ADAS功能的人类驾驶员驾驶。从网络世界发出的驱动指南将建议连接车辆的自动控制器或人类驾驶员进行协作/智能操纵,从而在安全性、移动性和/或环境可持续性方面对交通系统有利。
数字孪生框架中的网络世界处理这个两层框架中的所有计算工作。它不仅由物理世界的抽象(即物理实体和过程的数字副本)组成,而且还执行一些关键功能。首先,对来自物理世界的感测数据进行清理(如异常值检测和去除、缺失数据插补)和融合(包括时间同步)。然后,预处理的数据可以存储在数据库中(例如,用于数字跟踪),或者发送到数据挖掘和知识发现模块,以便使用高级计算技术(如机器学习)进行进一步的探索。从数据挖掘与知识发现模块中提取的信息被用来对知识库做出贡献,或者构建物理世界的模型。为了实现可视化,可以将仿真工具(如车辆模拟器、驾驶模拟器和交通模拟器)集成到建模模块中。位于网络世界的中心,知识库建立在历史信息之上,并随着新信息的流入而不断更新。这些知识可以用来进行预测分析(结合建模/仿真工具),并找到支持决策过程的最佳策略。深思熟虑的动作(通过通信模块)传回物理世界中的执行器,以提高整个系统的性能。
02 基于车辆到云的高级驾驶员辅助系统
在数字孪生框架下开发了一个基于V2C通信的ADAS,旨在为装备车辆的驾驶员提供速度信息。与图1所示的一般系统框架不同,图2中示出了特别针对ADAS的系统架构图。
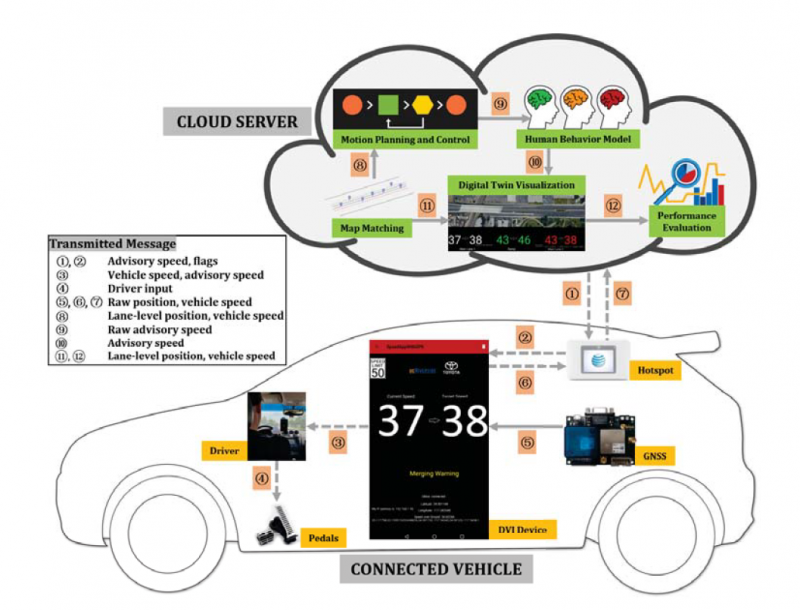
图2:采用数字孪生框架的基于V2C的ADAS的体系结构
A、 物理世界
在物理世界中,连接的车辆包括蜂窝热点(可选)、全球导航卫星系统(GNSS)、DVI设备和人类驾驶员。由于计算的速度制导是通过V2C通信从网络世界发出的,所以在物理世界中不需要车载计算机。
(一)手机热点:此模块提供对DVI设备的蜂窝访问,因此在这个数字孪生模型中启用V2C通信。Wi-Fi热点可能配备4G LTE(可能是5G)sim卡,并具有“共享热点”功能。但是,如果DVI设备(如移动电话或平板电脑)已经配备了sim卡,则不必使用此蜂窝热点。
(二)全球导航卫星系统:该模块安装在车辆上,实时测量其原始位置(经纬度)和速度信息,并通过micro-USB电缆将其发送至DVI设备。
(三)DVI设备:该模块向驾驶员显示咨询信息(通过V2C通信),以进行协作/智能操纵。DVI上显示的信息(图2中示出的示例)可以包括当前速度(左边的数字)、咨询速度(右边的数字)和一些其他的消息(例如,口头指导、经纬度、IP地址)。
(四)司机:配备车辆的驾驶员通过踩下加速/制动踏板,根据DVI调整车速。由于驾驶员不可能完美地跟踪咨询速度,因此在云服务器上运行一个人类行为模型,以预测跟踪误差并实时补偿引导,以提高系统性能。
B、 网络世界
这种基于V2C的ADAS的所有计算都在云服务器上进行,在云服务器上,物理实体(如车辆、驾驶员、道路)和相关功能模块的数字副本在网络世界中创建。ADAS的主要网络模块细分如下:
(一)地图匹配:地图匹配模块在云服务器上提供了试验场的预建地图,地图上有道路类型、道路长度、道路ID和方向、道路限速、合流区、影响区等信息。地图匹配模块的主要功能是位置同步和地理围栏。对于位置同步,通过提出的地图匹配算法,可以将从全球导航卫星系统接收到的车辆坐标(即经度、纬度和高度)与预先建立的地图进行匹配,以更新它们在网络世界中的当前位置。对于地理围栏,定义标志以检查每个时间步中车辆的位置和状况,因此可以相应地执行相关操作。
(二)运动规划与控制:此模块生成ego车辆的原始咨询速度。该模块的输入是所有相关车辆的速度和车道水平位置,其中运动规划器生成ego车辆的期望运动,而运动控制器计算参考速度以实现所需运动。
(三)人类行为模式:该模块预测驾驶员产生的速度跟踪误差,并对原始的咨询速度进行实时补偿。该模型的输出是发送给物理世界的建议速度,它已经考虑了驾驶员产生的速度误差。
(四)数字孪生可视化:本模块展示了网络世界中车辆的数字复制品。它接收来自人类行为模型的提示速度,以及来自地图匹配模块的位置和车速。该界面根据全球导航卫星系统(GNSS)模块测量到的位置,在预先建立的地图上显示所有车辆的实时移动情况。它还显示一些附加信息,如服务器IP地址、车辆的经纬度和/或配备车辆的DVI的简化版本。
(五)绩效评估:绩效评估模块对数据进行实时分析。速度、加速度、能量消耗、标准污染物排放等许多性能指标可以在云服务器上进行分析,并将结果发送回物理世界或显示在DVI上。
03 案例研究:匝道合并
A、问题形成与方法
为了验证数字孪生框架在ADAS中的实际有效性,进行了一个合作匝道合并的案例研究。所提出的方法如图3所示,其中假设每个合并车辆通过V2C通信启用并由人类驾驶员驱动。将任意两辆车的合流机动简化为跟车问题,采用了“虚拟车辆”思想:在另一条合流车道上生成一辆与实车具有相同纵向速度和距离的合流虚拟车。
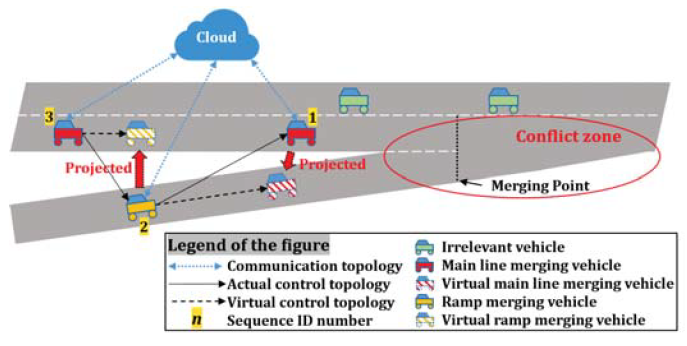
图3:匝道合并的数字孪生模型系统框架
根据当前的速度和要合并的距离,云服务器上的motion planner可以计算出估计的合并时间值。所有相关车辆的合并顺序可以通过对所有估计合并时间的值进行排序来确定。从图3可以看出,虚拟车辆被投射到另一条合流车道上,使得其跟随的车辆(具有一个较大的序列ID号)可以基于云服务器上的运动控制器进行跟车机动。
B、现场实施
在美国加利福尼亚州河滨市哥伦比亚大道(从芝加哥大道到爱荷华大道)进行了现场实施,以验证所提议的数字孪生框架的好处。沿主线的路段长度为780 m,匝道长度为322 m。两条车道上的限速约为20m/s(精确为45 mph)。在冲突区,主线来自高架桥,而匝道位于桥下。另外一条车道由于高程不同,无法观测到其他车道上的交通信息,这使得该试验台适合于进行协同合并的实现,并显示了其优越性。
基于V2C的ADAS已经被整合到三个生产的丰田花冠中,这些花冠最初根本没有配备ADAS。所有的系统算法和模型都运行在位于加州大学河滨分校服务器室的戴尔R630服务器上。此服务器配备两个IntelXeon 2.4 GHz 6核处理器、64GB RAM、14 TB存储空间,并由Windowsserver 2012和Linux操作系统与Python 3一起操作。蜂窝热点采用NetgearUnite 770S 4G LTE移动Wi-Fi热点。GNSS模块采用U-BloxNEOM8P-2实时动态(RTK)应用板包。车上的DVI设备采用谷歌Nexus 7平板电脑,通过微型USB电缆与U-Blox GNSS模块相连。
图4显示了数字孪生体在网络世界中的可视化,其中所有三辆车的数字复制品在虚拟地图中移动,并从物理世界实时更新位置。这里还显示了在网络世界中计算的速度,它们通过V2C通信发送到物理世界中的所有三个车辆。

图4:网络世界中的数字孪生可视化(速度单位为mph)
C、 绩效评估
云服务器上的性能评估模块对三辆车的数据(主要是速度和合并距离)进行实时分析,如图5所示。如图5(a)所示,匝道车辆在015秒内加速,以缩小其相对于(虚拟)干线车辆1的间隙。当干线车辆2将干线车辆1视为其跟随的领先车辆时,两辆干线车辆在最初的8秒内保持恒定速度。从8秒开始,主线车辆2的引导车辆根据定义的切换标志的值变化从主线车辆1切换到(虚拟)坡道车辆。在8-15秒期间,主线车辆2减速,为匝道车辆合并创造间隙。在15-20秒内,匝道车辆和干线车辆2的速度收敛到干线车辆1的速度,以便它们在合并后可以在三辆车串中行驶。
合并点轨迹的距离可以从图5(b)中看出,这与速度轨迹一致。需要注意的是,在短时间内(距离值未更新)距离轨迹平坦时,可以看到V2C通信的丢包,例如主线车辆1为11-12秒,坡道车辆为12-14秒,23-24秒。
同一次行程的燃油和排放结果也通过网络世界中的性能评估进行分析,从而实时告知驾驶员他/她的环境影响。如图6所示,由于车辆在主减速带上产生的污染物比主减速带多,因此车辆的排放量比主减速带多。结果表明,干线车辆1和2消耗的燃油量相同,产生的污染物排放量也相似。
并对V2C通信的通信时延进行了综合测试。在现场实施过程中,共记录了5次不同行程的1707次通信延迟样本,记录了一条消息从一辆车发送到另一辆车接收(消息已经通过云服务器)之间的时间差。平均通信延迟为88ms,最大为854ms。
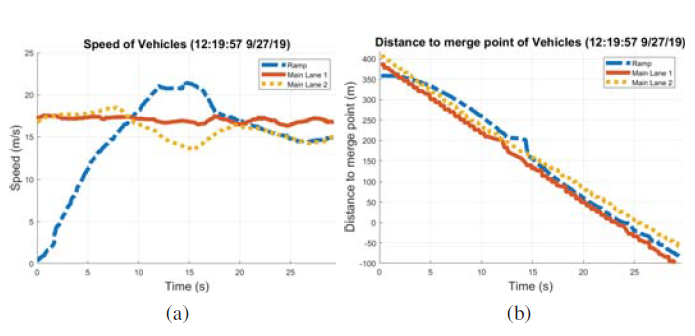
图5:匝道合并案例的车辆动力学结果
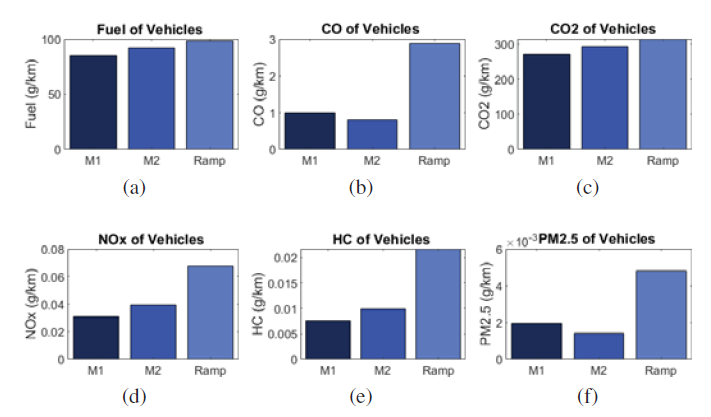
图6:匝道合并案例的燃料和排放结果
“ 数字孪生体作为一种新兴的网络物理系统表现形式,近年来受到越来越多的关注。它为实时监视和同步真实世界中的活动与虚拟对等物开辟了道路。这项研究开发了一个数字孪生范式,车载设备利用车载云(V2C)通信,可以通过蜂窝网络将数据上传到服务器。服务器根据接收到的数据创建一个虚拟世界,用数字孪生模型处理数据,然后将处理结果发送回连接的车辆。”
01 数字孪生框架
图1是本研究提出的一个两层框架的联网车辆数字孪生系统。下层代表物理世界,上层代表网络世界。通信模块在这个系统框架中起着至关重要的作用,它是将两个层紧密连接在一起的纽带。在本研究中,将蜂窝通信称为通信模块。
图1:联网车辆的通用数字孪生模型框架
随着时间的推移,在世界坐标系上定义的数字孪生框架的物理层可能包含所有物理实体及其交互作用,包括车辆和组件、驾驶员和乘客、道路基础设施、气象状态、其他道路使用者等。位于这一层的两个关键模块是传感器和执行器。传感器可以检测物理实体的动态状态、操作过程中的变化或事件发生,例如车速、驾驶员的注视和红绿灯状态,并在不同分辨率下汇总测量值。信息通过通信模块传输到网络世界,以便进一步处理。
另一方面,来自网络世界的处理结果被接收(同样通过通信模块),并作为物理世界中实体或过程的驱动指南。物理世界中的连接车辆可以部分或完全自动化(即,作为连接和自动车辆),或者由具有某些ADAS功能的人类驾驶员驾驶。从网络世界发出的驱动指南将建议连接车辆的自动控制器或人类驾驶员进行协作/智能操纵,从而在安全性、移动性和/或环境可持续性方面对交通系统有利。
数字孪生框架中的网络世界处理这个两层框架中的所有计算工作。它不仅由物理世界的抽象(即物理实体和过程的数字副本)组成,而且还执行一些关键功能。首先,对来自物理世界的感测数据进行清理(如异常值检测和去除、缺失数据插补)和融合(包括时间同步)。然后,预处理的数据可以存储在数据库中(例如,用于数字跟踪),或者发送到数据挖掘和知识发现模块,以便使用高级计算技术(如机器学习)进行进一步的探索。从数据挖掘与知识发现模块中提取的信息被用来对知识库做出贡献,或者构建物理世界的模型。为了实现可视化,可以将仿真工具(如车辆模拟器、驾驶模拟器和交通模拟器)集成到建模模块中。位于网络世界的中心,知识库建立在历史信息之上,并随着新信息的流入而不断更新。这些知识可以用来进行预测分析(结合建模/仿真工具),并找到支持决策过程的最佳策略。深思熟虑的动作(通过通信模块)传回物理世界中的执行器,以提高整个系统的性能。
02 基于车辆到云的高级驾驶员辅助系统
在数字孪生框架下开发了一个基于V2C通信的ADAS,旨在为装备车辆的驾驶员提供速度信息。与图1所示的一般系统框架不同,图2中示出了特别针对ADAS的系统架构图。
图2:采用数字孪生框架的基于V2C的ADAS的体系结构
A、 物理世界
在物理世界中,连接的车辆包括蜂窝热点(可选)、全球导航卫星系统(GNSS)、DVI设备和人类驾驶员。由于计算的速度制导是通过V2C通信从网络世界发出的,所以在物理世界中不需要车载计算机。
(一)手机热点:此模块提供对DVI设备的蜂窝访问,因此在这个数字孪生模型中启用V2C通信。Wi-Fi热点可能配备4G LTE(可能是5G)sim卡,并具有“共享热点”功能。但是,如果DVI设备(如移动电话或平板电脑)已经配备了sim卡,则不必使用此蜂窝热点。
(二)全球导航卫星系统:该模块安装在车辆上,实时测量其原始位置(经纬度)和速度信息,并通过micro-USB电缆将其发送至DVI设备。
(三)DVI设备:该模块向驾驶员显示咨询信息(通过V2C通信),以进行协作/智能操纵。DVI上显示的信息(图2中示出的示例)可以包括当前速度(左边的数字)、咨询速度(右边的数字)和一些其他的消息(例如,口头指导、经纬度、IP地址)。
(四)司机:配备车辆的驾驶员通过踩下加速/制动踏板,根据DVI调整车速。由于驾驶员不可能完美地跟踪咨询速度,因此在云服务器上运行一个人类行为模型,以预测跟踪误差并实时补偿引导,以提高系统性能。
B、 网络世界
这种基于V2C的ADAS的所有计算都在云服务器上进行,在云服务器上,物理实体(如车辆、驾驶员、道路)和相关功能模块的数字副本在网络世界中创建。ADAS的主要网络模块细分如下:
(一)地图匹配:地图匹配模块在云服务器上提供了试验场的预建地图,地图上有道路类型、道路长度、道路ID和方向、道路限速、合流区、影响区等信息。地图匹配模块的主要功能是位置同步和地理围栏。对于位置同步,通过提出的地图匹配算法,可以将从全球导航卫星系统接收到的车辆坐标(即经度、纬度和高度)与预先建立的地图进行匹配,以更新它们在网络世界中的当前位置。对于地理围栏,定义标志以检查每个时间步中车辆的位置和状况,因此可以相应地执行相关操作。
(二)运动规划与控制:此模块生成ego车辆的原始咨询速度。该模块的输入是所有相关车辆的速度和车道水平位置,其中运动规划器生成ego车辆的期望运动,而运动控制器计算参考速度以实现所需运动。
(三)人类行为模式:该模块预测驾驶员产生的速度跟踪误差,并对原始的咨询速度进行实时补偿。该模型的输出是发送给物理世界的建议速度,它已经考虑了驾驶员产生的速度误差。
(四)数字孪生可视化:本模块展示了网络世界中车辆的数字复制品。它接收来自人类行为模型的提示速度,以及来自地图匹配模块的位置和车速。该界面根据全球导航卫星系统(GNSS)模块测量到的位置,在预先建立的地图上显示所有车辆的实时移动情况。它还显示一些附加信息,如服务器IP地址、车辆的经纬度和/或配备车辆的DVI的简化版本。
(五)绩效评估:绩效评估模块对数据进行实时分析。速度、加速度、能量消耗、标准污染物排放等许多性能指标可以在云服务器上进行分析,并将结果发送回物理世界或显示在DVI上。
03 案例研究:匝道合并
A、问题形成与方法
为了验证数字孪生框架在ADAS中的实际有效性,进行了一个合作匝道合并的案例研究。所提出的方法如图3所示,其中假设每个合并车辆通过V2C通信启用并由人类驾驶员驱动。将任意两辆车的合流机动简化为跟车问题,采用了“虚拟车辆”思想:在另一条合流车道上生成一辆与实车具有相同纵向速度和距离的合流虚拟车。
图3:匝道合并的数字孪生模型系统框架
根据当前的速度和要合并的距离,云服务器上的motion planner可以计算出估计的合并时间值。所有相关车辆的合并顺序可以通过对所有估计合并时间的值进行排序来确定。从图3可以看出,虚拟车辆被投射到另一条合流车道上,使得其跟随的车辆(具有一个较大的序列ID号)可以基于云服务器上的运动控制器进行跟车机动。
B、现场实施
在美国加利福尼亚州河滨市哥伦比亚大道(从芝加哥大道到爱荷华大道)进行了现场实施,以验证所提议的数字孪生框架的好处。沿主线的路段长度为780 m,匝道长度为322 m。两条车道上的限速约为20m/s(精确为45 mph)。在冲突区,主线来自高架桥,而匝道位于桥下。另外一条车道由于高程不同,无法观测到其他车道上的交通信息,这使得该试验台适合于进行协同合并的实现,并显示了其优越性。
基于V2C的ADAS已经被整合到三个生产的丰田花冠中,这些花冠最初根本没有配备ADAS。所有的系统算法和模型都运行在位于加州大学河滨分校服务器室的戴尔R630服务器上。此服务器配备两个IntelXeon 2.4 GHz 6核处理器、64GB RAM、14 TB存储空间,并由Windowsserver 2012和Linux操作系统与Python 3一起操作。蜂窝热点采用NetgearUnite 770S 4G LTE移动Wi-Fi热点。GNSS模块采用U-BloxNEOM8P-2实时动态(RTK)应用板包。车上的DVI设备采用谷歌Nexus 7平板电脑,通过微型USB电缆与U-Blox GNSS模块相连。
图4显示了数字孪生体在网络世界中的可视化,其中所有三辆车的数字复制品在虚拟地图中移动,并从物理世界实时更新位置。这里还显示了在网络世界中计算的速度,它们通过V2C通信发送到物理世界中的所有三个车辆。
图4:网络世界中的数字孪生可视化(速度单位为mph)
C、 绩效评估
云服务器上的性能评估模块对三辆车的数据(主要是速度和合并距离)进行实时分析,如图5所示。如图5(a)所示,匝道车辆在015秒内加速,以缩小其相对于(虚拟)干线车辆1的间隙。当干线车辆2将干线车辆1视为其跟随的领先车辆时,两辆干线车辆在最初的8秒内保持恒定速度。从8秒开始,主线车辆2的引导车辆根据定义的切换标志的值变化从主线车辆1切换到(虚拟)坡道车辆。在8-15秒期间,主线车辆2减速,为匝道车辆合并创造间隙。在15-20秒内,匝道车辆和干线车辆2的速度收敛到干线车辆1的速度,以便它们在合并后可以在三辆车串中行驶。
合并点轨迹的距离可以从图5(b)中看出,这与速度轨迹一致。需要注意的是,在短时间内(距离值未更新)距离轨迹平坦时,可以看到V2C通信的丢包,例如主线车辆1为11-12秒,坡道车辆为12-14秒,23-24秒。
同一次行程的燃油和排放结果也通过网络世界中的性能评估进行分析,从而实时告知驾驶员他/她的环境影响。如图6所示,由于车辆在主减速带上产生的污染物比主减速带多,因此车辆的排放量比主减速带多。结果表明,干线车辆1和2消耗的燃油量相同,产生的污染物排放量也相似。
并对V2C通信的通信时延进行了综合测试。在现场实施过程中,共记录了5次不同行程的1707次通信延迟样本,记录了一条消息从一辆车发送到另一辆车接收(消息已经通过云服务器)之间的时间差。平均通信延迟为88ms,最大为854ms。
图5:匝道合并案例的车辆动力学结果
图6:匝道合并案例的燃料和排放结果



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
