




 广告
广告





















































【SAECCE会议日程剧透】自动驾驶汽车动态“传感器”——高精度动态地图与定位技术
2020-10-22 17:11:03· 来源:中国汽车工程学会年会暨展览会

■导读保证自动驾驶汽车的安全运行需要多种传感器,高精动态地图与定位技术作为特殊传感器,是不可或缺的力量在业内已经达成共识,高精地图与定位技术利用先验知
■ 导读
保证“自动驾驶汽车的安全运行”需要多种传感器,高精动态地图与定位技术作为特殊传感器,是不可或缺的力量在业内已经达成共识,高精地图与定位技术利用先验知识积累,为自动驾驶汽车实时提供安全可靠信息,但相关测绘法律、法规、标准问题仍需要从技术层面进一步突破,高精地图与定位数据在线审图,实时数据加密,动态地图数据服务平台等关键技术,需突破传统技术壁垒等关键问题展开讨论。对于这些关键问题的深入探讨和辨析,向美国、日本、德国在该领域先进经验学习,有助于促进中国自动驾驶技术的顺利发展,从而促进“自动驾驶更加安全”在中国的实现。
中国汽车工程学会携手国家智能网联汽车创新中心、中国智能网联汽车产业创新联盟自动驾驶地图与定位工作组,将于10月27-29日举办的“2020中国汽车工程学会年会暨展览会(SAECCE 2020)”期间,特别策划和组织专题分论坛:自动驾驶汽车动态“传感器”——高精度动态地图与定位技术。
E05:自动驾驶汽车动态“传感器”——高精度动态地图与定位技术
会议时间&地点
2020年10月28日,09:00-12:00
上海汽车会展中心
(上海市嘉定区博园路7575号)
协办单位
国家智能网联汽车创新中心
中国智能网联汽车产业创新联盟自动驾驶地图与定位工作组
会议主席
杨殿阁
清华大学车辆与运载学院教授,中国智能网联汽车产业创新联盟自动驾驶地图与定位工作组组长

杨殿阁,国家“万人计划”领军人才,科技部中青年科技创新领军人才,教育部新世纪优秀人才。1991年至2001年在清华大学汽车工程系学习并获得学士、硕士和博士学位,2001年博士毕业后留校工作至今。现任清华大学车辆学院教授,博导,意大利米兰理工大学客座教授,美国密西根大学(安娜堡)访问学者,清华大学智能汽车自动驾驶领域学科带头人,主要从事智能汽车环境感知和自动驾驶地图方向的研究。曾参与国家智能网联汽车技术路线图编写,国家发改委、科技部、工信部智能汽车相关规划及政策咨询工作。2018年获得清华大学清韵烛光我最喜爱的教师,2016年入选国家万人计划,2015年曾入选科技部中青年科技创新领军人才,2013年获得清华大学学术新人奖,2011年入选教育部新世纪优秀人才,并获得中国汽车工业优秀青年科技人才,2010年获得北京市青年科技奖。近年来,研究方向主要集中智能汽车自动驾驶领域,作为负责人承担国家十三五重点课题1项,北京市冬奥重大专项课题1项,重大国际合作1项,国家863课题2项,自然科学基金4项,2010年、2013年及2018年获得国家技术发明奖3项,此外还获得省部级一等奖3项、省部级二等奖2项。
会议联合主席
李庆建
国汽(北京)智能网联汽车研究院有限公司基础地图平台项目部项目总监

李庆建,国汽(北京)智能网联汽车研究院有限公司高精地图与定位负责人;中国智能网联汽车产业联盟自动驾驶地图与定位工作组副组长;中国汽车工程学会高精地图与定位专家;毕业于武汉大学,从业导航地图行业近18年,十多年导航地图及高精地图和定位等领域研发、产品经历,具有较强的软件研发和产品设计经验,具有多项专利,参与多项省、部级高精地图项目研发。
01 演讲嘉宾简介及演讲摘要提前看
● 关于自动驾驶地图的内涵、外延与标准的探讨

江昆
清华大学车辆与运载学院
江昆博士,2016年毕业于法国贡比涅技术大学,现在清华大学车辆与运载学院任助理研究员,已入选中国科协“青年人才托举工程”,主要研究方向是自动驾驶地图、多源信息感知融合理论等,主要目标是基于高精度地图实现感知决策能力的增强。所承担和参与的主要项目有青年基金“基于分布式智能空间的自动驾驶决策方法”和国家重点研发计划自动驾驶感知技术等。
演讲摘要:
关于自动驾驶地图的内涵、延长与标准的探讨,在20年前大家都知道电子地图是车载导航数据的基础,随着车联网的普及,我们知道电子地图也是车联网服务系统的关键环节。而现在,地图再次成为我们整个行业关注的焦点,其本质原因是汽车对地图的需求在不断升级,地图的角色也由传统的车载导航系统转变为车控系统的核心技术。自动驾驶地图是现在的研究热点,是支撑自动驾驶产业落地的关键基础平台。
演讲要点:
· 自动驾驶地图的特点不只是数据精度高
· 自动驾驶地图具有非常大的扩展性,是重要的基础平台
· 自动驾驶地图的推广需要研究制定相关标准
● 高精动态地图平台
李庆建
国汽(北京)智能网联汽车研究院有限公司基础地图平台项目部项目总监
演讲摘要:
分析国内外的高精动态地图平台进展,根据智能网联汽车对高精地图的需求是精确性、实时性、安全性,梳理中国高精度地图平台发展路径;根据当前的测绘政策与安全,研究高精动态地图平台的安全解决方案,梳理未来政策完善的思路;介绍高精地图标准体系和技术路线;最后,探讨高精动态地图平台在高级别自动驾驶示范区中应用解决方案。
演讲要点:
· 高精地图平台发展现状
· 高精地图行业存在问题
· 中国高精动态地图平台
· 地图平台服务中的政策与安全
· 高级别自动驾驶与高精动态地图平台服务
● 高精地图规格标准化的重要性

田岛惠介
Dynamic Map Platform海外业务(亚太地区)副总裁
田岛惠介,Dynamic Map Platform的海外业务(亚太地区)副总裁,负责高精地图在亚太地区的业务拓展和联盟合作。田岛惠介还为企业领导者提供有关数字导航地图和用于自动驾驶的高精地图的知识经验,帮助他们应对在亚太地区开展业务所涉及的跨文化挑战,并帮助他们制定在该地区取得成功的战略。田岛惠介自1994年日本图商Increment P (IPC)成立以来就加入了该公司。他的角色是在先锋公司(Pioneer Corporation)负责中国市场的汽车导航系统和数字导航地图开发,2007年曾担任与拥有甲级测绘资格图商的合资公司董事总经理,2009年回日本之后2017年加入DMP。
演讲摘要:
近日来,有些媒体在说,如果自动驾驶汽车上有必要的传感器,高精地图只是一个辅助功能(也就是“传感器的另外附加的东西”),甚至看到自动驾驶不需要高精地图的论调。我们DMP已经在为上路的几款自动驾驶汽车提供高精地图,并且受到高度评价,就是开的很舒适。过去自动驾驶的关键词是“安全”和“安心”,但今天我们要加上“舒适”这两个字。我们认识到,这是高精地图提供商再次承担的社会责任。而且“舒适”不仅仅是乘坐质量的问题,在经济上也要“舒适” 的感觉,才能让更多人更快的使用。今天我们想再次与大家分享一下高精地图在自动驾驶中的角色。我们相信,当中国的路上所有的自动驾驶汽车都用统一的高精地图规格时,就能实现真正的自动驾驶社会。我们DMP已经实现了日本10家汽车厂共享的高精地图的标准规格。我们认为,在中国也必要高精地图的统一规格。
演讲要点:
· DMP的高精地图的情况
· 目前日本的高精地图产业化情况
· 高精地图在自动驾驶中的角色
· 高精地图规格标准化的重要性
● 车载高精度定位的探索与实践

王佳
北京北斗星通导航技术股份有限公司导航产品事业部行业总监
王佳,北京北斗星通导航技术股份有限公司导航产品事业部行业总监,从事高精度定位技术与产品的应用研究近十年,具有卫星导航、惯性导航的专业知识背景,在自动驾驶、高精度地图采集、车路协同等智能网联汽车相关领域的产品方案及应用方面具有丰富的实践经验。
演讲摘要:
GNSS/INS组合导航系统是自动驾驶车辆获取绝对定位的关键技术,当前市场上应用较多的产品成本过高且无车规认证无法满足自动驾驶量产需要,针对自动驾驶量产、众包地图采集、车路协同应用等所需的低成本、车规级产品需求,全新研发的车规级高精度定位模组已完成软硬件整体设计,计划20年年底前批量生产。
演讲要点:
· 车载高精度定位的难点与产品形态
· 车规级产品方案探索与实践
· 多场景性能测试验证
· 典型应用案列介绍
● 5G+高精度定位为智能网联汽车服务要点

韩建新
海克斯康制造智能大中华区执行副总裁
韩建新,海克斯康制造智能集团大中华区执行副总裁/首席运营官、海克斯康制造智能研究院副院长。熟悉测量、数字孪生、工业软件、移动互联网、物联网、工业大数据和智能网联汽车领域,业务涉及海克斯康工业测量与智能制造、大地和时空测量与智慧农业、智慧矿山、智慧建筑、智慧城市、智慧交通等板块。具有20多年跨国公司工作经历,从事公司战略、运营、销售、软件架构与开发管理。在产业生态与投资、企业技术创新、商业模式创新和数字化转型方面有一定的研究和丰富的经验。
演讲摘要:
高精度定位与高精度地图是智能网联汽车的基础,而北斗高精度定位是智能网联汽车定位与高精地图采集的关键基础技术。随着北斗三号全球卫星导航系统全面组网完成及5G技术的快速发展,5G+北斗强强联手,建成高精度定位系统,并通过5G网络连接形成北斗地基增强网络,实现厘米级精度定位,满足物流园区、产业园区、机场、港口等封闭场景下的定位需求,推动L3级及以上自动驾驶乘用车开发应用。
演讲要点:
· 智能网联汽车介绍(网联化、智能化)
· L3级及以上自动驾驶车辆对高精度定位的需求
· 高精度定位技术方案
● 千寻时空智能,致力高精度定位量产方案

宋子未
千寻位置网络有限公司
智能驾驶事业部智能驾驶产品总监
宋子未,毕业于同济大学电子科学与技术系,后取得香港大学IMBA硕士学位。在通信、卫星导航、车载娱乐系统领域从业多年,曾就职于爱立信及泰为导航。熟悉通信及车载定位导航系统架构,曾驱动通用、福特、菲亚特克莱斯勒多个车型的车载导航本土化产品开发与落地。加入千寻后,致力于高精度时空服务在智能车辆及智慧交通上的产品化落地,为千寻位置高精度定位走入车载领域搭建产品平台并驱动多个车型上高精度定位项目的量产。
演讲摘要:
进入智能驾驶时代,机器智能逐渐替代人类智能,而高精度的时空能力则是赋予机器智能精确识别时间空间的关键要素。而随着智能驾驶功能的逐步提升,越来越多的智能车辆投入量产,什么样的时空智能方案才能满足精准、可靠、安全的量产级车规级要求?
演讲要点:
· 智能驾驶量产时代需要高精度时空智能
· 时空智能对智能汽车的作用
· 量产级时空智能应当具备的能力
· 时空智能对智慧交通的作用
● 面向量产的自动驾驶定位能力的验证技术

张民岗
张民岗,工程师职称,10年地图从业经验,高精度地图产品工艺的主要搭建者,多个国家课题和项目的技术负责人,拥有8项地图相关技术专利。
演讲摘要:
自动驾驶车辆在投放市场之前需要进行充分的技术验证,证明技术的安全性。自动驾驶系统的决策和控制高赖于多传感的融合提供的精确的定位结果,车厂在量产之前需要能有一种技术手段对融合定位系统进行验证。
演讲要点:
· 车辆面临的困境
· 地图验证技术
· 定位验证技术
● 高精地图进展与规划思考

佘党恩
百度智驾地图业务部负责人
演讲摘要:
结合自动驾驶应用的当前阶段,分析对高精地图的应用需求,针对需求目前的产品组合和策略以及未来的规划展望
演讲要点:
· 当前自动驾驶应用高精地图的需求分析
· 高精地图产品技术进展
· 高精地图未来规划思考





最新资讯
-
2025智驾“封神榜”测评|小鹏MONA M03智车
2025-04-29 18:24
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
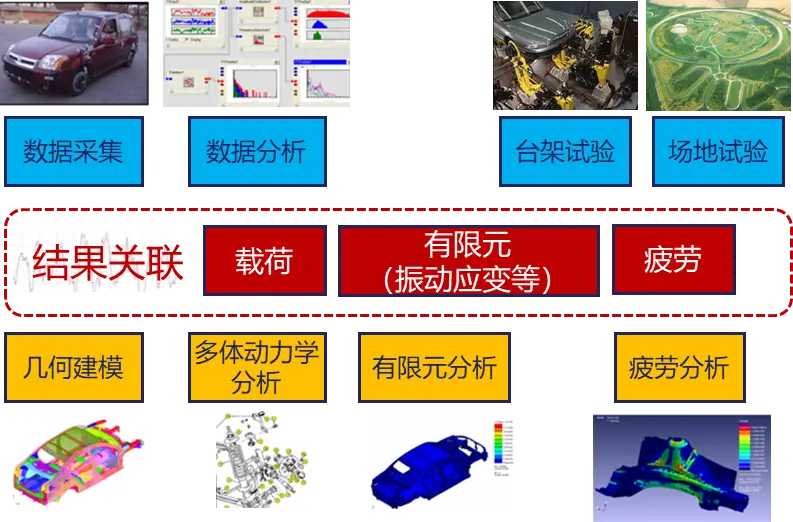
试验载荷谱采集
2025-04-29 11:07
