




 广告
广告





















































云拆解:大众途观的ADAS系统
2020-11-15 20:38:18· 来源:汽车ECU开发

ADAS功能作为当前车辆的主打配置一致,也是各大厂商重点宣传的功能之一。之前也分析过宝马、特斯拉以及ADAS域,感兴趣请戳以下链接:BMW 3系的ADAS系统解析特斯
ADAS功能作为当前车辆的主打配置一致,也是各大厂商重点宣传的功能之一。之前也分析过宝马、特斯拉以及ADAS域,感兴趣请戳以下链接:
BMW 3系的ADAS系统解析
特斯拉 Model 3的ADAS
ADAS域的拓扑分析
今天通过大众途观,来看看大众最新的ADAS系统。其主要组件包括位于后保险杠两侧的76-77GHz毫米波雷达,前方的76GHz前方雷达,嵌入至前后保险杆的12个超声波传感器以及安装在挡风玻璃内侧的前方摄像头,总体架构如图1所示。下面依次来看看各个子系统。
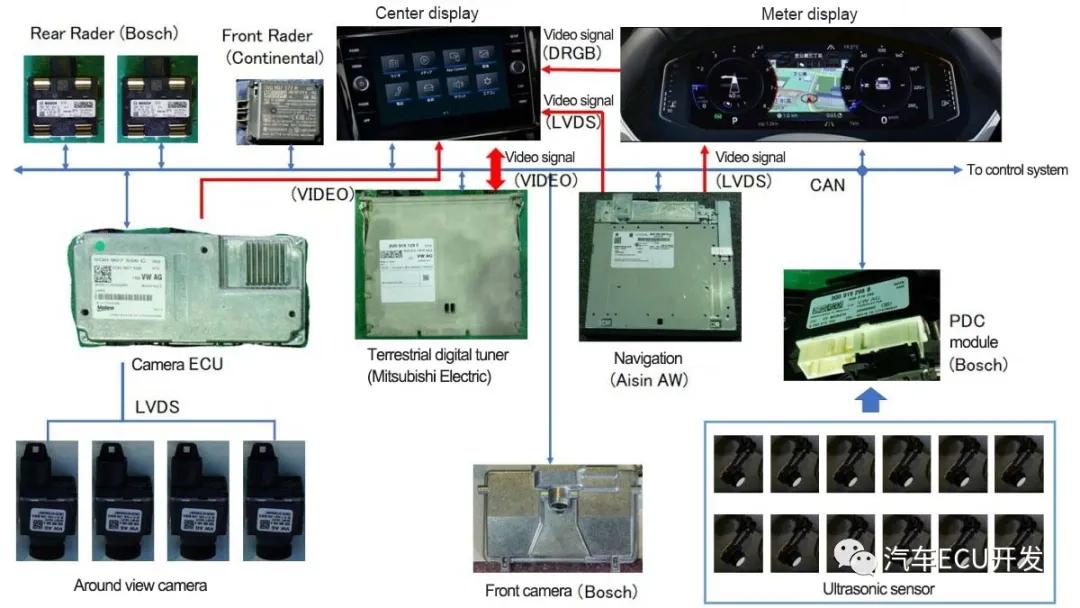
图1 ADAS系统总体架构
前方毫米波雷达
前方的76GHz毫米波雷达安装在车标的背面,用于实现对行人的检测,但是据悉由于行人的雷达波反射率较低,真实的检测存在一定难度。
该毫米波雷达是由大陆提供的,如图2所示,主芯片采用的是32bit的NXP SC5773,两套CAN通信系统的收发器采用的是NXP的TJA 1042。
行人检测雷达方面,通常采用24/26GHz的亚毫米波雷达,但是其缺点就是会与卫星信号产生干扰,为了避免这种干扰,一般降低雷达的发射功率,这样就导致无法检测远距离物体。因此大众采用76-77GHz毫米波雷达,其特点就是检测具体超过200m,可以实现远程狭角。另外在丰田的C-HR上也是采用同款大众毫米波雷达。

图2 前方76GHz毫米波雷达
前方摄像头
安装在前挡风玻璃的摄像头采用的是博世的单眼摄像头,如图3所示,其像素为1280x960,摄像头的横向视野角度为50°,纵向视野角度为28°。
该系统是由双核微处理器与赛灵思的FPGA构成,采用FPGA的原因是为了做冗余,满足未来性能提升的需求,可以对图像处理的检测逻辑进行升级,该摄像头系统的检测方位取决于检测对象的大小,如果是车辆,其检测距离为120m,如果是行人,那检测距离为60m。
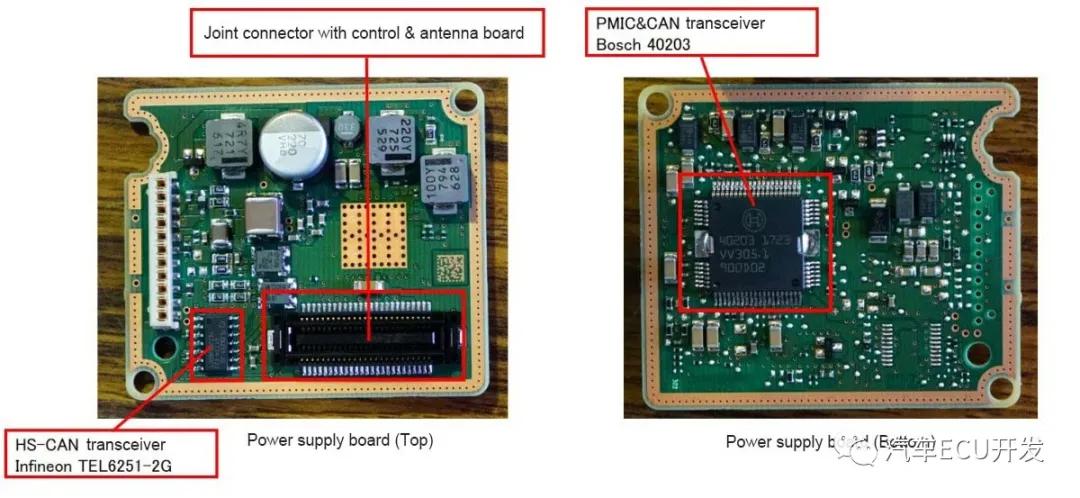
图3 前方摄像头
后方毫米波雷达
后方雷达安装在车辆后保险杆上,如图4所示,该雷达为博世的76-77GHz毫米波雷达,其检测范围为0.36mm~80m。该雷达由天线与主控板以及电源主板构成,如图5所示,此外还有4个独立接收频道,与数字波束的双基地模式雷达,通过这些技术,有不同朝向的独立天线构成毫米波雷达,提高角度测量精度。
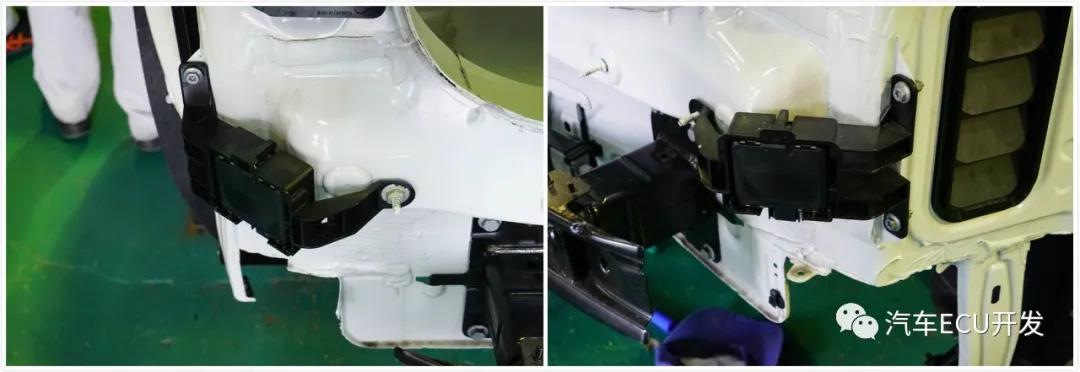
图4 后方雷达安装位置
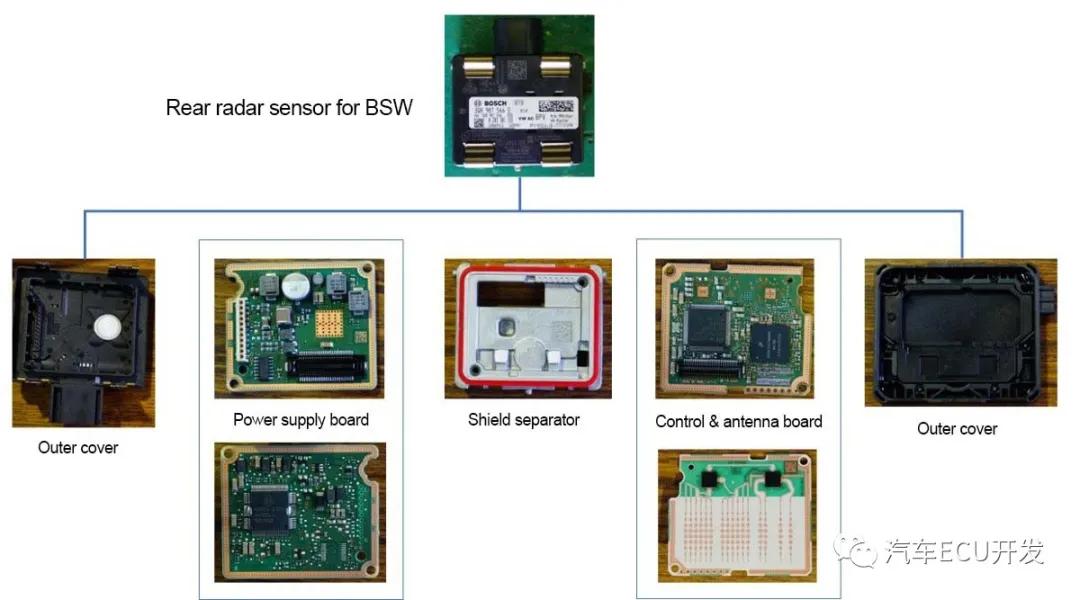
图5 博世雷达
供电主板(如图6所示)是以博世的PMIC为主芯片,通信块中CAN收发器采用英飞凌TLE
6251,与PMIC内置的CAN+FlexRay。该电源主板具备连接天线与控制主板的波纹管式连接用连接器。
图6 雷达供电主板
控制部分采用意法半导体的A267BB和NXP的SC6672。天线部分的RF前端由内置英飞凌VCO的发射器和接收器两种芯片构成。TX侧的IC RTN7735整合了TX和VCO,因此减少了零部件个数,如图7所示。
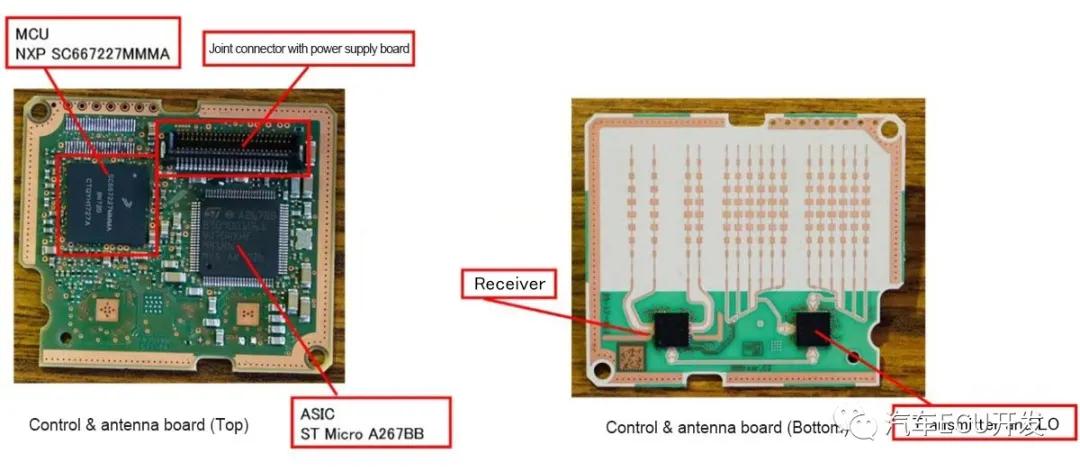
图7 雷达控制部分
超声波传感器
超声波传感器安装在车辆的前后保险杠,总共为12个,前后个6个,通过博世的泊车控制器PDC(如图8所示)整合这些传感器,如图8所示。这些传感器用于泊车辅助和障碍物接近警告等用途,该超声波传感器是由博世提供,最小检测距离为15cm,最大为5.5m。

图8 博世PDC
环景影像系统
途观的环景影像系统是由法雷奥提供,主控芯片采用的是意法半导体的32bitMCU,图像处理采用德州的环景影像用SOC(TDAx系列),如图9所示。
此外,摄像头输入配套了Broadcom的7 port Ether switch,利用LVDS I/F连接摄像头。
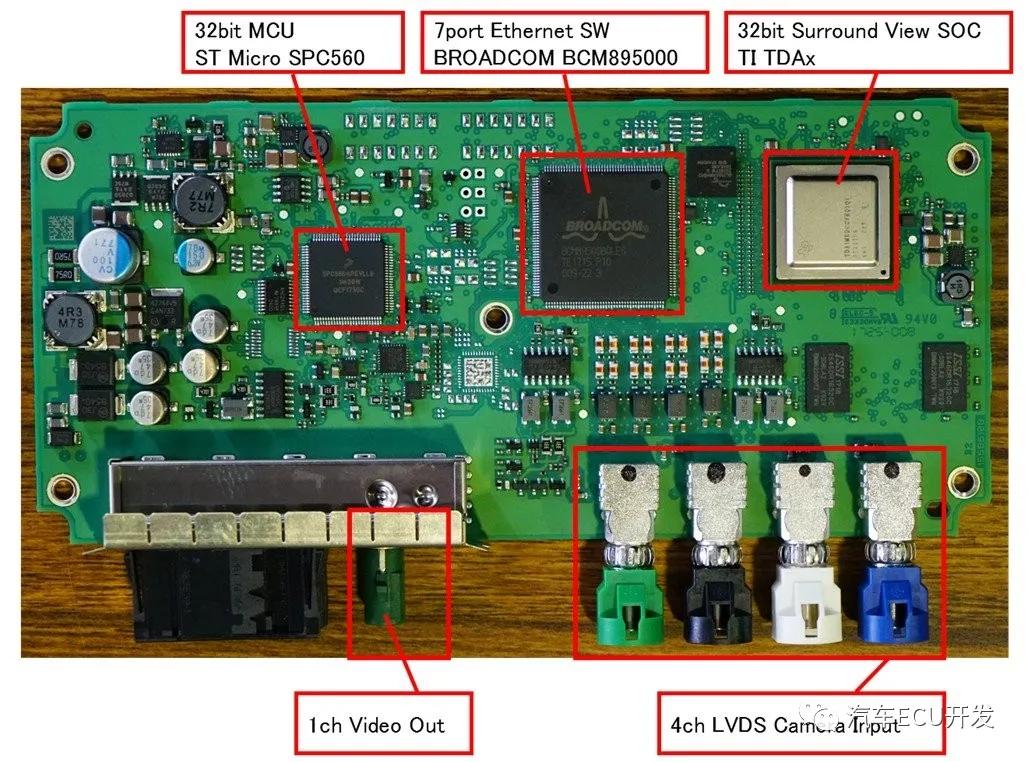
图9 环景影像主控
仪表显示屏
该仪表显示屏是由大陆配套的,结构很简单,如图10所示,由液晶屏和一块控制主板组成。主控采用的是瑞萨的R-CAr,通信和其他控制功能采用的是瑞萨的32bit SBU。
该系统的特点是配到了赛灵思的可编程SoC-ZYNQ系列,可编程SoC结合了ARM处理器与FPGA,可通过编程更改软件与硬件。
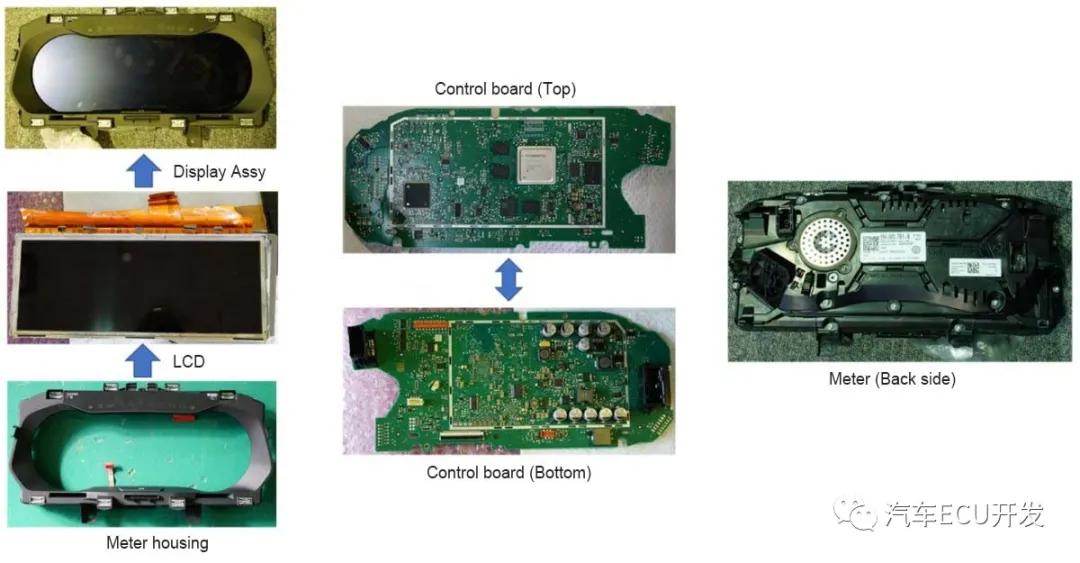
图10 显示屏系统
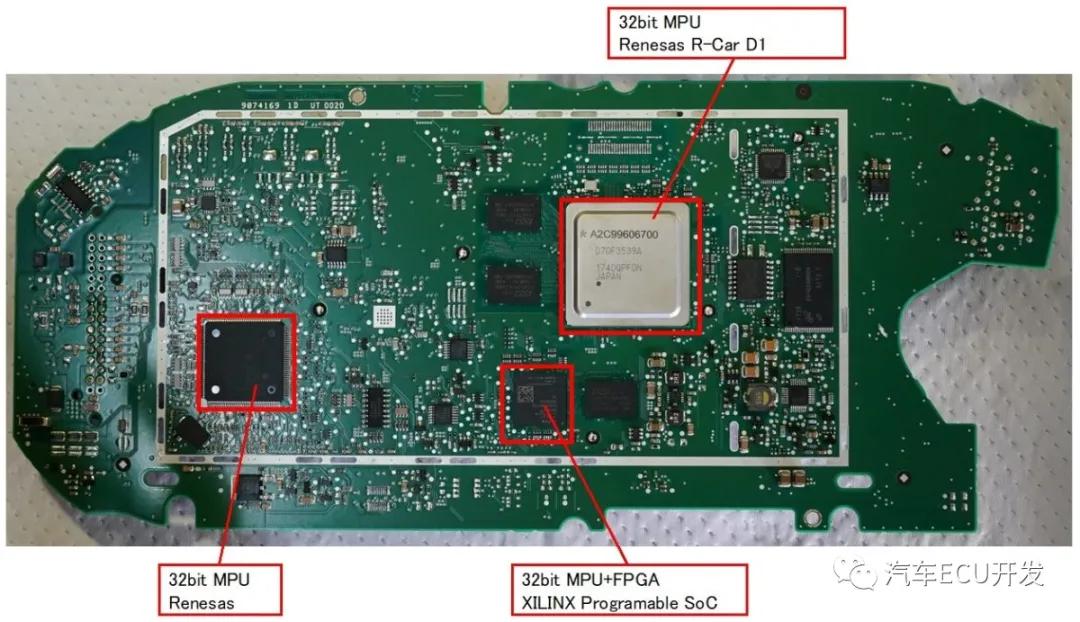
图11 显示屏主板
以上组件构成的ADAS系统,是车辆具备ACC、变道辅助、静态侧灯、动态照明辅助、后视摄像、环景影像、泊车辅助、驾驶员疲劳监控、泊车距离控制、后方侧向来车警报、预防碰撞制动等功能。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
