




 广告
广告





















































一种 AEBS 毫米波雷达的测试方法及其应用
2020-12-17 23:04:01· 来源:《客车技术与研究》 作者:陈尊煌, 冯作居, 欧敏辉 单位:厦门金龙联合汽车工业有限公司

引言: 提出一种 AEBS 毫米波雷达性能的测试方法, 并进行测试应用。该方法测试设备简单, 能够降低测试成本,同时能够测试不同厂家、不同型号的毫米波雷达,对新产
引言:
提出一种 AEBS 毫米波雷达性能的测试方法, 并进行测试应用。该方法测试设备简单, 能够降低测试成本,同时能够测试不同厂家、不同型号的毫米波雷达,对新产品的研发具有重要意义。
AEBS 技术结构主要分为环境感知模块、中央处理器分析模块 、指令执行控制模块 。车载毫米波雷达作为环境感知模块的核心传感器, 对汽车的主动安全具有重要作用 。JT/T 1242—2019标准规定了营运车辆 AEBS 测试规范, 其主要体现在 AEBS 指令控制模块的测试方法和要求 , 并没有对 AEBS 的环境感知模块的测试方法和要求。

因此本文参考 JT/T 1242—2019, 并结合毫米波雷达的性能提出一种应用于 AEBS 的毫米波雷达的感知测试方法及要求。该方法是对现版 JT/T 1242—2019的有益补充,通过设计包含图像实时显示和采集、毫米波雷达数据实时显示和采集的上位机软件, 结合距离、目标车辆、目 标行人进行测试。该方法不需要使用复杂的测试设备,可以适配不同厂家的毫米波雷达进行测试,对新产品的研发具有重要意义。
01 上位机软件设计
实时显示和存储摄像头图像和毫米波雷达数据的上位机软件 设计, 包括功能选择、运行控制、雷达目标显示、视频显示、危险目 标信息显示等 5 个模块。其主要实现如下功能:
1) 功能选择模块。实现不同功能的需求, 包括CAN 口设置,离线处理,实时测试,数据采集等。
2) 运行控制模块。通过具体控制选择,可对雷达数据进行筛选和滤波处理,得到选择性更多的数据。
3) 雷达目标显示模块。周期性显示雷达目标数据,其中危险目 标障碍物设置高亮识别, 数据包含目标的纵向距离及速度。
4) 视频显示模块。展示摄像头信息, 同步显示测试环境,方便与雷达数据进行后期处理。
5) 危险目标信息显示模块。该模块输出危险目标的具体数据, 能够反映出 障碍物与自 车的相对位置,更加直观地表现当前测试结果。
02 毫米波雷达感知测试方法及要求
本文提出 的对 JT/T 1242—2019 进行补充的毫米波雷达感知测试方法及要求的具体内容如下。
2.1 最小和最大探测距离测试
1) 测试方法。最小探测距离: 自车静止, 目标车辆或行人从相距 20 m 处慢慢靠近自车, 直至上位机中显示的目标车辆或行人消失;记录相应数据。
最大探测距离:自车静止, 目标车辆或行人从相距 60m 处远离自车,直至上位机中显示的目标车辆或行人消失;记录相应数据。
2) 要求。毫米波雷达的最小检测距离应不大于2 m,对目标车辆的最大检测距离应不小于 150 m, 对行人的最大检测距离应不小于 60 m。
2.2 水平横向宽度测试
1) 测试方法。自车静止,目标车辆或行人和自车的方向一致。在测试开始前, 自车位于车道线中心,分别将目标车辆或行人置于车道最左侧和最右侧, 车头方向应与自 车一致, 各进行一次测试。左/右侧宽度测试时,目标车左/右侧车轮分别压自 车左/右侧车道线。当自 车距离目 标车辆 200 m 时, 测试开始, 目标车辆倒车接近自 车,当自 车与目 标车辆距离 150 m时应检测出车辆。自车与行人距离 60 m 时应在规定横向距离内检测出行人。
2) 要求。毫米波雷达对目 标车辆或行人在最大检测距离位置的最小检测水平横向宽度应不小于3.75 m。
2. 3 定点精度测试
1) 测试方法。自车静止, 目标车辆或行人在10 m处时, 上位机进行数据采集; 目标车辆或行人移动到 20 m 处,上位机进行数据采集;目标车辆或行人从 30 m、40 m、50 m、……一直到 180 m 处结束。
2) 要求。算法计算得到的目 标车辆或行人位置与实际位置数值偏差不超过图片10% 。
2.4 不同车速下最大检测目标距离
1) 测试方法。目标车辆或行人静止,和自车的方向一致,在测试开始前,自车和目标车辆或行人中心线保持一致。当自车距离目标车辆或行人250 m时,测试开始。自 车分别以车速 15 km/h、20 ~ 60 km/h( 其间隔为 10 km/h)的速度匀速接近目标车辆或行人;记录识别最大检测距离值。
2) 要求。毫米波雷达在不同车速下目标车辆的最大检测距离应不小于 150 m, 对行人的最大检测距离应不小于 60 m;误差范围在 5% 以内。
2.5 不同车速下检测目标精度
1) 测试方法。目标车辆或行人静止, 和自车的方向一致,在测试开始前, 自 车和目标车辆或行人中心线保持一致。当自 车距离目 标车辆或行人 250 m时,测试开始。自 车分别以 15 km/h、20 ~ 60 km/h( 其间隔为 10 km/h) 的速度匀速向目 标车辆或行人行驶,并记录传感器 CAN 数据( 识别目标的总帧数、虚报数量、漏报数量) ;进行数据后处理分析。
2) 要求。车辆运行时, 记录毫米波雷达 CAN 数据,统计识别目 标的总帧数、虚报数量、漏报数量, 虚报占比应小于 5% ,漏报占比应小于 5% 。
2.6 动态跟踪测试
1) 测试方法。在封闭场景下和公共道路上进行跟车行驶,对车辆前方路况进行拍摄, 记录毫米波雷达的原始数据,通过分析判断目标距离准确性和跟踪稳定性。
2) 要求。在动态跟踪测试中, 毫米波雷达应能够实时准确识别车前方障碍物, 错检、漏检率应低于5% 。
03 实车测试与结果分析
本次测试包括测试车辆 1 辆、目 标车辆 1 辆、目标行人 1 个、测试用前向中距雷达 IRAM300 1 个、笔记本电脑 1 台、USBCAN 卡 1 张、50 m 卷尺 1 把、标记物若干个。雷达安装位置位于车辆纵向中心线上( 偏
移量为 0) 。
试验场地道路长 300 m 左右, 车道线类型符合 GB 5768.3—2009。通过设计的上位机软件对毫米波雷达的感知性能进行实车测试, 并保存完整的测试数据进行离线后处理, 测试结果及分析如下。
3.1 最大最小检测距离试验结果及分析
本次实车测试毫米波雷达识别车辆或行人的最小距离为 0.1 m,识别车辆最大距离为 159.3 m, 识别行人最大距离为 129.4 m,满足前述要求。
3.2 水平横向宽度测试试验结果及分析
本次实车测试毫米波雷达, 当车道宽度为 4.69m 时对目标车辆或行人在最大检测距离位置都可以识别到,满足前述要求。
3.3 定点精度测试试验结果及分析
毫米波雷达对固定点目标的探测距离结果见表1。
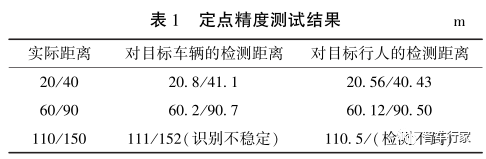
表 1 中,毫米波雷达算法计算得到的目标车辆或行人位置信息与实际位置信息偏差最大值为 4% , 小于图片10% 。 该毫米波雷达满足要求。
3.4 不同车速下目标最大检测距离试验结果分析
不同车速下毫米波雷达感知目标最大检测距离结果见表 2。
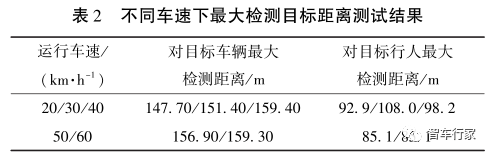
表 2 中,毫米波雷达仅在一个车速下对目标车辆的最大检测距离 ( 147 cm) 小于 150 m, 其误差为1.5% ,满足误差范围;毫米波雷达在不同车速下对行人的最大检测距离都大于 60 m,满足要求。
3.5 不同车速下检测目标精度试验结果及分析
不同车速下毫米波雷达目标检测结果见表3。
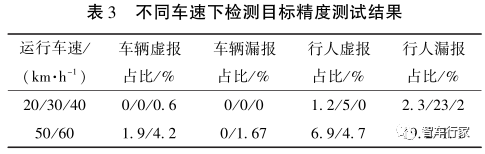
表 3 中,毫米波雷达对目 标车辆的识别中, 虚报和漏报占比都小于 5% , 具备较好的识别稳定性, 毫米波雷达在不同车速下对车辆识别精度满足要求;毫米波雷达对目标行人的识别中,虚报和漏报占比大于5% ,虚报漏报情况较为明显,毫米波雷达在不同车速下对行人识别精度不满足要求。
3.6 动态跟踪测试试验结果及分析
1) 在封闭场景下,路面场景比较简单, 雷达探测的稳定性比较好, 探测距离精度比较高。在本车道内, 基本都能稳定跟踪目 标车辆, 错检、漏检率低于5% ,满足要求。
2) 在公共道路上,路面场景比较复杂, 雷达探测目标车辆稳定性比探测目 标行人稳定性好。在探测车辆方面,基本都能稳定跟踪目标车辆, 错检、漏检率小于 5% , 满足要求。在探测行人方面, 虚报漏报情况相对较多,错检、漏检率大于 5% ,不满足要求。
结束语
本文针对 JT/T 1242—2019 现版本的不足, 通过设计毫米波雷达系统的上位机软件能够实现实时显示和采集前方目 标的距离标识、种类等, 也能够保存完整的测试数据并且进行后期离线处理。
最大程度上减少测试次数, 得到有效的测试结果, 不需要使用复杂的测试设备,具有测试方便、效率高等优点, 同时可以适配不同厂家的毫米波雷达进行测试, 也减少了去测试场测试的成本。但是还存在数据处理不够系统化的不足,需要不断改进。
后续的工作可以从以下方面展开:
1) 针对复杂环境下的信号处理算法进行优化,以提高毫米波雷达系统在复杂环境下的检测精度和稳定性。
2) 引入车道线作为辅助, 在 4 条车道线范围内跟踪前方目标障碍物, 得到更有效的目 标识别, 减少错检、漏检情况。
提出一种 AEBS 毫米波雷达性能的测试方法, 并进行测试应用。该方法测试设备简单, 能够降低测试成本,同时能够测试不同厂家、不同型号的毫米波雷达,对新产品的研发具有重要意义。
AEBS 技术结构主要分为环境感知模块、中央处理器分析模块 、指令执行控制模块 。车载毫米波雷达作为环境感知模块的核心传感器, 对汽车的主动安全具有重要作用 。JT/T 1242—2019标准规定了营运车辆 AEBS 测试规范, 其主要体现在 AEBS 指令控制模块的测试方法和要求 , 并没有对 AEBS 的环境感知模块的测试方法和要求。
因此本文参考 JT/T 1242—2019, 并结合毫米波雷达的性能提出一种应用于 AEBS 的毫米波雷达的感知测试方法及要求。该方法是对现版 JT/T 1242—2019的有益补充,通过设计包含图像实时显示和采集、毫米波雷达数据实时显示和采集的上位机软件, 结合距离、目标车辆、目 标行人进行测试。该方法不需要使用复杂的测试设备,可以适配不同厂家的毫米波雷达进行测试,对新产品的研发具有重要意义。
01 上位机软件设计
实时显示和存储摄像头图像和毫米波雷达数据的上位机软件 设计, 包括功能选择、运行控制、雷达目标显示、视频显示、危险目 标信息显示等 5 个模块。其主要实现如下功能:
1) 功能选择模块。实现不同功能的需求, 包括CAN 口设置,离线处理,实时测试,数据采集等。
2) 运行控制模块。通过具体控制选择,可对雷达数据进行筛选和滤波处理,得到选择性更多的数据。
3) 雷达目标显示模块。周期性显示雷达目标数据,其中危险目 标障碍物设置高亮识别, 数据包含目标的纵向距离及速度。
4) 视频显示模块。展示摄像头信息, 同步显示测试环境,方便与雷达数据进行后期处理。
5) 危险目标信息显示模块。该模块输出危险目标的具体数据, 能够反映出 障碍物与自 车的相对位置,更加直观地表现当前测试结果。
02 毫米波雷达感知测试方法及要求
本文提出 的对 JT/T 1242—2019 进行补充的毫米波雷达感知测试方法及要求的具体内容如下。
2.1 最小和最大探测距离测试
1) 测试方法。最小探测距离: 自车静止, 目标车辆或行人从相距 20 m 处慢慢靠近自车, 直至上位机中显示的目标车辆或行人消失;记录相应数据。
最大探测距离:自车静止, 目标车辆或行人从相距 60m 处远离自车,直至上位机中显示的目标车辆或行人消失;记录相应数据。
2) 要求。毫米波雷达的最小检测距离应不大于2 m,对目标车辆的最大检测距离应不小于 150 m, 对行人的最大检测距离应不小于 60 m。
2.2 水平横向宽度测试
1) 测试方法。自车静止,目标车辆或行人和自车的方向一致。在测试开始前, 自车位于车道线中心,分别将目标车辆或行人置于车道最左侧和最右侧, 车头方向应与自 车一致, 各进行一次测试。左/右侧宽度测试时,目标车左/右侧车轮分别压自 车左/右侧车道线。当自 车距离目 标车辆 200 m 时, 测试开始, 目标车辆倒车接近自 车,当自 车与目 标车辆距离 150 m时应检测出车辆。自车与行人距离 60 m 时应在规定横向距离内检测出行人。
2) 要求。毫米波雷达对目 标车辆或行人在最大检测距离位置的最小检测水平横向宽度应不小于3.75 m。
2. 3 定点精度测试
1) 测试方法。自车静止, 目标车辆或行人在10 m处时, 上位机进行数据采集; 目标车辆或行人移动到 20 m 处,上位机进行数据采集;目标车辆或行人从 30 m、40 m、50 m、……一直到 180 m 处结束。
2) 要求。算法计算得到的目 标车辆或行人位置与实际位置数值偏差不超过图片10% 。
2.4 不同车速下最大检测目标距离
1) 测试方法。目标车辆或行人静止,和自车的方向一致,在测试开始前,自车和目标车辆或行人中心线保持一致。当自车距离目标车辆或行人250 m时,测试开始。自 车分别以车速 15 km/h、20 ~ 60 km/h( 其间隔为 10 km/h)的速度匀速接近目标车辆或行人;记录识别最大检测距离值。
2) 要求。毫米波雷达在不同车速下目标车辆的最大检测距离应不小于 150 m, 对行人的最大检测距离应不小于 60 m;误差范围在 5% 以内。
2.5 不同车速下检测目标精度
1) 测试方法。目标车辆或行人静止, 和自车的方向一致,在测试开始前, 自 车和目标车辆或行人中心线保持一致。当自 车距离目 标车辆或行人 250 m时,测试开始。自 车分别以 15 km/h、20 ~ 60 km/h( 其间隔为 10 km/h) 的速度匀速向目 标车辆或行人行驶,并记录传感器 CAN 数据( 识别目标的总帧数、虚报数量、漏报数量) ;进行数据后处理分析。
2) 要求。车辆运行时, 记录毫米波雷达 CAN 数据,统计识别目 标的总帧数、虚报数量、漏报数量, 虚报占比应小于 5% ,漏报占比应小于 5% 。
2.6 动态跟踪测试
1) 测试方法。在封闭场景下和公共道路上进行跟车行驶,对车辆前方路况进行拍摄, 记录毫米波雷达的原始数据,通过分析判断目标距离准确性和跟踪稳定性。
2) 要求。在动态跟踪测试中, 毫米波雷达应能够实时准确识别车前方障碍物, 错检、漏检率应低于5% 。
03 实车测试与结果分析
本次测试包括测试车辆 1 辆、目 标车辆 1 辆、目标行人 1 个、测试用前向中距雷达 IRAM300 1 个、笔记本电脑 1 台、USBCAN 卡 1 张、50 m 卷尺 1 把、标记物若干个。雷达安装位置位于车辆纵向中心线上( 偏
移量为 0) 。
试验场地道路长 300 m 左右, 车道线类型符合 GB 5768.3—2009。通过设计的上位机软件对毫米波雷达的感知性能进行实车测试, 并保存完整的测试数据进行离线后处理, 测试结果及分析如下。
3.1 最大最小检测距离试验结果及分析
本次实车测试毫米波雷达识别车辆或行人的最小距离为 0.1 m,识别车辆最大距离为 159.3 m, 识别行人最大距离为 129.4 m,满足前述要求。
3.2 水平横向宽度测试试验结果及分析
本次实车测试毫米波雷达, 当车道宽度为 4.69m 时对目标车辆或行人在最大检测距离位置都可以识别到,满足前述要求。
3.3 定点精度测试试验结果及分析
毫米波雷达对固定点目标的探测距离结果见表1。
表 1 中,毫米波雷达算法计算得到的目标车辆或行人位置信息与实际位置信息偏差最大值为 4% , 小于图片10% 。 该毫米波雷达满足要求。
3.4 不同车速下目标最大检测距离试验结果分析
不同车速下毫米波雷达感知目标最大检测距离结果见表 2。
表 2 中,毫米波雷达仅在一个车速下对目标车辆的最大检测距离 ( 147 cm) 小于 150 m, 其误差为1.5% ,满足误差范围;毫米波雷达在不同车速下对行人的最大检测距离都大于 60 m,满足要求。
3.5 不同车速下检测目标精度试验结果及分析
不同车速下毫米波雷达目标检测结果见表3。
表 3 中,毫米波雷达对目 标车辆的识别中, 虚报和漏报占比都小于 5% , 具备较好的识别稳定性, 毫米波雷达在不同车速下对车辆识别精度满足要求;毫米波雷达对目标行人的识别中,虚报和漏报占比大于5% ,虚报漏报情况较为明显,毫米波雷达在不同车速下对行人识别精度不满足要求。
3.6 动态跟踪测试试验结果及分析
1) 在封闭场景下,路面场景比较简单, 雷达探测的稳定性比较好, 探测距离精度比较高。在本车道内, 基本都能稳定跟踪目 标车辆, 错检、漏检率低于5% ,满足要求。
2) 在公共道路上,路面场景比较复杂, 雷达探测目标车辆稳定性比探测目 标行人稳定性好。在探测车辆方面,基本都能稳定跟踪目标车辆, 错检、漏检率小于 5% , 满足要求。在探测行人方面, 虚报漏报情况相对较多,错检、漏检率大于 5% ,不满足要求。
结束语
本文针对 JT/T 1242—2019 现版本的不足, 通过设计毫米波雷达系统的上位机软件能够实现实时显示和采集前方目 标的距离标识、种类等, 也能够保存完整的测试数据并且进行后期离线处理。
最大程度上减少测试次数, 得到有效的测试结果, 不需要使用复杂的测试设备,具有测试方便、效率高等优点, 同时可以适配不同厂家的毫米波雷达进行测试, 也减少了去测试场测试的成本。但是还存在数据处理不够系统化的不足,需要不断改进。
后续的工作可以从以下方面展开:
1) 针对复杂环境下的信号处理算法进行优化,以提高毫米波雷达系统在复杂环境下的检测精度和稳定性。
2) 引入车道线作为辅助, 在 4 条车道线范围内跟踪前方目标障碍物, 得到更有效的目 标识别, 减少错检、漏检情况。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
