




 广告
广告





















































汽车驾驶模拟器主客观评价方法的应用研究
2020-12-31 21:55:05· 来源:中国汽车技术研究中心有限公司

作者:徐亮,石娟,郑英东,郭魁元,秦孔建单位:中国汽车技术研究中心有限公司 [摘要]驾驶模拟器的种类较多,成本较贵,如何根据使用需求选择合适的驾驶模拟器
作者:徐亮,石娟,郑英东,郭魁元,秦孔建
单位:中国汽车技术研究中心有限公司
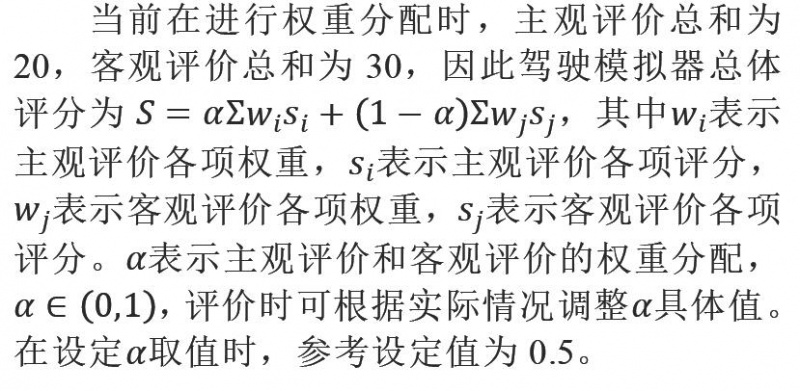
[摘要]驾驶模拟器的种类较多,成本较贵,如何根据使用需求选择合适的驾驶模拟器是当前很多汽车企业面临的难题。而对驾驶模拟器进行科学和系统性的评价是进行汽车驾驶模拟器采购选型的基础。当前国内外还缺乏系统性的汽车驾驶模拟器评价方法。本文重点研究并提出了一套汽车驾驶模拟器主客观评价方法,并将主客观评价评分结果进行加权综合得到总体评分。所提出的评价方法可以应用在驾驶模拟器选型之中,为企业进行驾驶模拟器采购以及后续的设备检定提供参考依据。
关键词:驾驶模拟器,评价,主客观,逼真度
前言
汽车驾驶模拟器一般由车辆实时仿真系统、运动系统、视景系统、声音模拟系统、运行监控系统、集成信息管理系统和数据传输系统组成[1] 。它将真实的驾驶员与虚拟车辆、虚拟场景组成驾驶员在环测试系统,通过逼真地模拟车辆在各种工况下的车辆状态,并通过视觉、体感、触感反馈和声效等方式让驾驶员对被测目标进行主客观性能评估。其特点在于避免了对真实驾驶员行为和驾驶员主观评价的建模,而当前这两方面是很难有效建模。通过这种方式,能够让整套测试系统与实车测试结果更为一致,从而实现更为有效的测试。相较实车测试,除了缩短测试成本和周期以外,同时测试可控性和可观性更强,能够设置各种测试场景,可以实现危险极限测试,能存储更为丰富的数据类型。
通过调研国内外的研究现状表明,目前有关驾驶模拟器的评价研究较少,给驾驶模拟器的选型带来了困难。通过实地考察多台驾驶模拟器,以及调研国内外文献,总结并提出了一套汽车驾驶模拟器主客观评价方法。
1、驾驶模拟器发展现状
汽车驾驶模拟器的研究很早就已经开展,最早是从上个世纪60年代开始。第一个阶段是静态驾驶模拟器阶段:在1965年,美国机械工程师协会出版一篇报告,报告[2]中提到驾驶员坐在一个静止的驾驶舱内,舱前是投影仪系统,放映真实场景的彩色电影。一年后,美国人力资源研究组织开发了一套类似的系统[3]。
第二个阶段是动态驾驶模拟器阶段。这个阶段,驾驶舱可以具备较小行程的运动。1970年代早期,德国汽车公司大众有限公司开发的驾驶模拟器,是采用一块屏幕安装在驾驶员座椅前,没有驾驶舱,驾驶员座椅放置在一个运动机构上,具备俯仰、侧倾和横摆三个自由度。1980年,美国交通和联邦公路管理局,决定通过资助基于计算机网络组建完全交互式驾驶模拟器的可行性研究。1985年,戴姆勒-奔驰在柏林-马林费尔德研究中心[4],建设了第一次以六足并联机构为运动基础的驾驶模拟器。从此,在1990年代,马自达[5]、通用[6]、福特[7]、雷诺[8]、宝马等车企都开始建设具备全运动系统的交互式仿真的驾驶模拟器。同时期,多家国家研究机构,如日本汽车研究所[9]、英国交通研究实验室[10]等,也开始纷纷建设自家的驾驶模拟器。另外,许多大学也开始建设驾驶模拟器,比较有代表性的是美国爱荷华大学驾驶模拟器[11],它采用的是波音737飞行模拟器所使用的六足运动系统。中国吉林大学于1996年建成了包含6个自由度的驾驶模拟器[12],用于车辆性能设计、车载控制系统开发等方面。

图1 NADS驾驶模拟器
第三个阶段是带导轨大行程动态驾驶模拟器,即大幅增加了驾驶舱水平运动的行程(包含前向、侧向、横摆三个方向)。在爱荷华大学开发的驾驶模拟器基础上,TRW公司对此进行了改进,并将改进后的驾驶模拟器命名为“国家高级汽车驾驶模拟器(NADS)[13]”。如图1所示,它将驾驶舱放置在一个直径为7.3 米的圆形舱内,圆形舱则安装在六足运动机构上,六足运动机构下是双轴滑轨,具备19 米的水平纵向和侧向行程,以及330°的横摆角行程。丰田驾驶模拟器受NADS S驾驶模拟器影响,在东富士技术中心的驾驶模拟器采用类似的方案,不同的是在侧向运动行程上增至25米,纵向行程上增至35米。
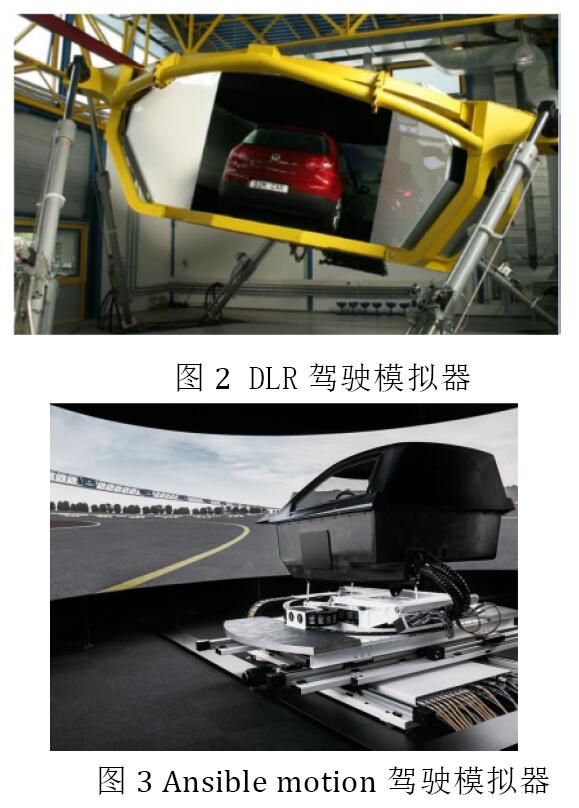
近些年,涌现越来越多各种设计类型的驾驶模拟器,主要体现在运动平台的设计越来越多样化。德国航天航空局(DLR R)设计的驾驶模拟器[14]如图2所示。Ansible motion公司的驾驶模拟器[15]如图3 所示。VI-grade驾驶模拟器[16]如图4 所示。Anthony Best Dynamics(ABD)驾驶模拟器[17]如图5所示。其中DLR的这种设计是将作动器的铰接到驾驶舱顶部,使旋转点尽可能接近驾驶员头部。Ansible motion模拟器,将运动平台分成了三层,从而将车辆六向运动由三层运动机构来实现。VI-grade 的驾驶模拟器采用两层,下部采用三足机构,进行低频大行程运动,上部采用六足机构,进行高频小行程运动。ABD驾驶模拟器没有采用分层的运动系统,而是采用8 个楔形机构进行驱动,运动系统放置在一个长导轨通过磁力驱动,可实现侧向较大范围运动。

2、驾驶模拟器评价方法国内外研究现状
Ansible motion 的工程师Kia认为驾驶模拟器的评价可以从两个方面来评价,一方面从驾驶模拟器各个软硬件组成部分评价,另一方面通过试驾进行评价。提到软硬件系统可分为运动系统、应用工具、视景系统、计算机系统、音频系统等几大类进行评价;其中,运动系统包含评价子类有运动平台、驾驶舱内辅助运动机构(座椅、主动安全带),应用工具包含联合仿真环境、图像生成、数据存储等。试驾主观评价,主要通过平顺性、操控性、制动性等几大类评价。
Anthony Best Dynamics 的工程师Adrian博士重点提到了驾驶模拟器运动平台的性能评价和一些试驾项目以进行驾驶模拟器性能评估。关于运动平台的性能,提出通过行程、频率响应特性、延迟时间、线性度、一致性、摩擦、噪音、故障率等方面进行评价。行程这一方面,需要结合评价车辆实际运动规律,即车辆在不同自由度上的行程范围,同时需要考虑复合行程,即运动平台同时在进行多个方向的运动时的行程范围。频率响应特性也需要结合车辆各个方向实际频率分析需求。延迟时间需要尽可能小,尤其是需要小于人类所能感受的滞后时间。关于如何进行驾驶模拟器试驾,以便进行评估,Adrian 博士提到首先需要有经验的驾驶员进行足够长时间的驾驶,这样才能有效评估。质量好的驾驶模拟器,当车辆参数改变幅度较小时,例如1-2% ,试驾时就能让驾驶员感受到;质量不好的驾驶模拟器,即使车辆参数改动幅度很大时,很多时候驾驶员试驾时也不能感受到。
VI-grade运动平台设计单位鹭宫制作所伊荣生认为,关于运动平台的评价,低频受行程限值,中频受速度限值,高频受加速度限值,如果各个数值越大,对运动体感的依赖就越小。同时提出平台设计的行程,需要分析汽车在各种道路驾驶时,三个自由度上(Z、Roll、Pitch)的行程范围。另外,还分析了车辆在一般驾驶情况下,和一般路面行驶时,各个方向的加速度范围。因此需要分析运动平台的加速度范围满足车辆一般驾驶情况下的加速度要求。
吉林大学管欣教授多年来一直从事驾驶模拟器的开发与研究,提出模拟器逼真度[12]的概念,用来描述模拟器驾驶感觉和实车驾驶感觉的一致情况。吉林大学段春光博士[12]认为,改进车辆动力学模型,是提升模拟器逼真度的关键环节之一。通过将驾驶模拟器中的整车动力学模型仿真数据与实车场地试验数据进行对比是评价驾驶模拟器逼真度的方法之一。段博士主要进行了滑行试验、纵向加速试验、制动试验、操纵稳定性试验方面的对比。另外,分析了影响模拟器逼真度几个方面:车辆动力学模型、仿真路面环境、硬件工作能力及子系统匹配。
英国利兹大学的Andrew 博士[18]研究了几个驾驶模拟器关键子系统对驾驶模拟器有效性的影响,重点包含视景系统、前庭系统、听觉系统。视景系统方面,显示质量非常重要,包含画面分辨率,更新频率,视角。这对于驾驶员估计车速、物体之间距离、车辆朝向以及侧向控制有着重要意义。前庭系统方面,前庭系统主要与驾驶模拟器的运动系统相关,Harms[19],Duncan[10]等研究表明,当运动平台固定式,驾驶员在驾驶模拟器上相对真实道路驾驶时,在车道上位置变化更大;Siegler,Reymond[20]等人研究表明,与仅提供视觉信息相比,当运动平台存在横向运动提示时,驾驶员会执行更大的转向。关于音频对驾驶模拟器试驾时驾驶员行为的影响还不是很明显。
3、驾驶模拟器主观评价方法
主观评价重点通过视觉、体感、触感、声觉等分项评价,同时包含通过试驾进行驾驶逼真度综合评价。
3.1 视觉评价
驾驶模拟器多采用环幕投影显示系统,根据环形屏幕角度的大小,通常有120 °至360° 不等。多通道虚拟三维投影显示系统是目前非常流行的一种具有高度沉浸感的虚拟现实显示系统,该系统以多通道视景同步技术、数字图像边缘融合技术、多通道亮度和色彩平衡技术为支撑。
3.1.1 环境特征逼真度
环境特征包含两个方面:静态环境特征和动态环境特征。下面展示了不同软件中渲染后的视景效果。评价时,根据环境特征逼真度,按照五分制分为非常差(0-1)、差(0-2)、中(2-3)、良(3-4)、优(4-5)。其中,环境逼真度中如图6所示,环境逼真度优如图7 所示。

3.1.2 视景流畅度
视景流畅度的评价主要是观察视景的变化是否流畅,是否会出现卡顿现象,帧与帧的图像是否能够平滑过渡。流畅度主要与视景计算工作站的计算性能相关。根据视景流畅度,按照五分制进行评分。
3.1.3 视景明亮度
视景明亮度,主要观察并比较视景系统在额定工作情况下,视景效果和真实环境的明亮程度,过于明亮和过于昏暗都是不合适的。按照五分制进行评分,越接近真实,评分越高。
3.1.4 视景拼接平滑度
数字图像显示在屏幕上,是由多块数字图像拼接而成,重点关注环形屏幕数字图像之间拼接处是否平滑,有无相互覆盖、重叠、有缝隙等现象,以及明亮程度是否一致等。同样按照五分制进行评分。
3.1.5 视景同步程度
驾驶模拟器显示时,常采用多通道投影技术,当出现不同步时,在试驾时会发现环幕有些区域的图像的帧已经更新,有些区域还未更新。这一项性能的主观评分按照五分制评分。
3.1.6 视景距离和速度逼真度
视景的距离和速度逼真度也是很重要的一项视景指标。在评价视景距离逼真度时,比较视景中的道路两旁的电线杆与实际道路两旁
相同距离的电线杆,判断视觉感受上是否一致。在评价视景速度逼真度时,主要根据驾驶舱内仪表盘上的速度信息和环幕中的图像变化,主观评价是否与实车相应速度下的感受一致。这一项性能评分采用五分制。
3.2体感评价
体感是通过驾驶员耳朵内前庭进行感受,前庭系统能够感受线性加速度和角加速度。当驾驶员在驾驶模拟器中驾驶时,运动平台会模拟在实车道路上驾驶时的车体运动。
在进行该项评价时,需要在空间比较开阔的虚拟试验场进行。下面所有的评价都按照五分制评分。
3.2.1 纵向和俯仰两个方向的体感评价
纵向和俯仰两个方向的体感评价,主要通过直线加速和制动来进行评价。评价时,初始车速为40km/h 和80km/h,然后进行紧急制动(1s内制动到底)和缓慢制动(10s 制动到底), 进行加速(1s 内加速到底)和缓慢加速(10s 内加速到底)。在这些试验中,评价纵向和俯仰两个方向的体感和实车驾驶时的一致性。
3.2.2 侧向、侧倾、横摆三个方向的体感评价
侧向、侧倾、横摆三个方向的体感评价,主要通过操纵转向进行评价,在虚拟动态广场上进行稳态圆周试验,固定转向角度90 °不变,逐渐增加车速。在虚拟试验场上,保持车速在40km/h左右,进行绕桩试验(或称蛇形试验)。在此试验中,评价侧向、侧倾、横摆三个方向的体感与实车驾驶时的一致性。
3.2.3 垂向、俯仰、侧倾三个方向的体感评价
垂向、俯仰、侧倾三个方向的体感评价,主要通过在虚拟试验场上进行平顺性试验评价,如图8 所示。固定车速30km/h,在平顺性测试试验场上进行试驾,评价垂向、俯仰、侧倾三个方向的体感与实车驾驶时的一致性。

图8平顺性虚拟试验场
3.3 触感评价
触感反馈主要通过方向盘力反馈、制动踏板力反馈、加速踏板力反馈、座椅和安全带力反馈来实现。为了让驾驶员沉浸感更强,在驾驶舱内所受的力也需尽量保持和实车驾驶时一致。而所有力反馈中,方向盘力反馈最为重要,驾驶员在试驾时需要判断是否存在方向盘的回正力矩和路感反馈力矩。
方向盘力反馈,主要进行三种工况下试验评价:1.原地转向;2. 蛇形试验;3. 比利时路面上试验。
制动踏板力反馈、加速踏板力反馈、座椅纵向力反馈、安全带力反馈,与纵向和俯仰两个方向的体感评价试验工况一样,在此过程中进行制动踏板力反馈、加速踏板力反馈、座椅纵向力反馈和安全带力反馈评价。
座椅侧向力反馈,和侧向、侧倾、横摆三个方向的体感评价试验工况一样,在此过程中进行座椅侧向力反馈评价。
3.4 声觉评价
声觉评价最重要是评价发动机的声音,胎噪,风声等。
在评价发动机声音,将档位置于空挡,然后逐渐加大加速踏板行程,判断发动机声音是否增加。
在评价胎噪和风声时,将档位置于D 档,然后逐渐加大加速踏板行程,在车速逐渐增加时,观察胎噪和风声是否随之增加。
3.5 驾驶逼真度主观评价
驾驶逼真度主观评价是一种综合评价,是对驾驶模拟器视觉评价、体感评价、触感评价、声觉评价的综合。
在进行该项评价时,将选择城市道路虚拟场景、高速公路虚拟场景、乡村道路虚拟场景、山地道路虚拟场景。让驾驶员在四种类型的虚拟场景中进行驾驶。最后比较与实际道路驾驶的主观感受。与实际道路越接近,认为驾驶逼真度越高。此项评分也采用五分制。
4、驾驶模拟器客观评价方法
对驾驶模拟器的客观评价,主要是基于驾驶模拟器相关子系统的性能参数进行评价。驾驶模拟器的客观评价分为两类,硬件系统和软件系统。
4.1 硬件系统
4.1.1 运动平台
关于运动平台,需要根据实际的平台性能参数和相关测试报告进行评价。主要评价如下关键方面:1. 行程范围;主要判断驾驶模拟器运动平台的各个自由度方向行程是否大于乘用车一般驾驶时行程。其中乘用车在驾驶时,垂向上的行程大多在±100mm 范围内,侧倾方向上的行程大多小于5°,俯仰方向的行程大多小于5°,考虑体感运动算法的影响,侧倾方向和俯仰方向的行程大于6°即可满足要求;
2. 复合运动行程范围;主要判断运动平台在进行几个方向复合运动时(急加速、制动、转向等行驶工况下)的行程范围。3. 加速度范围;主要判断驾驶模拟器的运动平台各个方向加速度是否大于乘用车驾驶时的车体加速度。研究表明:乘用车在行驶时,前后加速度一般小于10m/s2;左右加速度一般小于5m/s2;垂向加速度一般小于10m/s2;4. 频率响应带宽;主要判断驾驶模拟器的运动平台在各个方向上的频率带宽是否满足要求。5. 频响一致性;主要判断驾驶模拟器的运动平台在不同行程上,频率响应曲线是否较为一致。6.延迟性能;主要判断驾驶模拟器的运动平台在不同方向上的延迟响应时间。7. 平台负载能力;在不影响平台运动响应性能时,负载能力是越大越好,意味着驾驶舱里面可以装置更多设备;8.噪音;主要判断运动平台运动时,噪音强度大小。9. 平台故障率。主要判断运动平台在10 年内的故障发生情况。
4.1.2 驾驶舱
驾驶舱也是关系到驾驶模拟器沉浸感的关键系统之一。主要通过如下几个方面进行评价:1. 驾驶员操纵机构(制动踏板、加速踏板、换挡机构、方向盘)是否与实车一致。2. 驾驶舱内仪表盘显示的功能是否和实车仪表盘一致。3. 是否安装后视镜。4. 是否有驾驶员状态监测系统。5. 是否安装转向灯操作杆。
4.1.3 视景硬件系统
视景硬件系统,主要包含环屏、投影仪、图像渲染工作站。在进行视景系统客观评价时,主要评价如下方面:1. 投影仪的刷新频率。2. 环形屏幕上的画面分辨率。3. 投影仪最大亮度。
4.1.4 实时仿真计算机
实时计算机的计算性能决定了仿真模型和图像渲染的计算时间。计算性能出众的实时计算机,将会有效缩短延迟时间。实时仿真计算机的评价主要通过:1.CPU 核数;2.CPU 主频;3.I/O接口类型和数量。
4.2 软件系统
4.2.1 中控系统
关于中控系统,主要评价功能是否齐全,是否包含如下功能:1. 仿真监控与管理功能;
2. 数据记录和管理功能;3.配置各个子系统的功能;4. 开启各个系统的功能;5. 系统故障诊断功能。
4.2.2 仿真建模软件关于仿真建模软件,主要评价内容如下:
1. 仿真模型是否齐全,如车辆动力学模型、驾驶员模型、车辆传感器模型、车辆控制器模型、交通环境模型、道路模型。2. 仿真模型能否实时仿真。3.软件兼容性。4. 软件是否支持模块化和用户自定义。
4.2.3 运动平台控制和体感运动算法软件
运动平台控制软件对于实现运动平台的准确快速控制是非常重要的。重点评价项目包含:1. 体感运动算法类型是否丰富,以便适应用户不同的应用需求;2. 是否支持用户配置体感运动算法参数。
4.2.4 视景渲染软件
视景渲染软件的评价项目包含:1. 是否能实现多通道同步高清输出。2. 是否支持各种天气配置。3. 是否支持动态阴影效果;4. 是否支持物理光源仿真,如车辆各种灯光效果模拟;
5. 是否支持反光效果,如湿滑路面反光。6.是否包含物理表面材质建模,从而支持雷达模型的探测。7. 虚拟仿真场景,交通元素和道路类型是否覆盖了中国典型道路交通环境。
5、驾驶模拟器主客观评价方法应用
案例
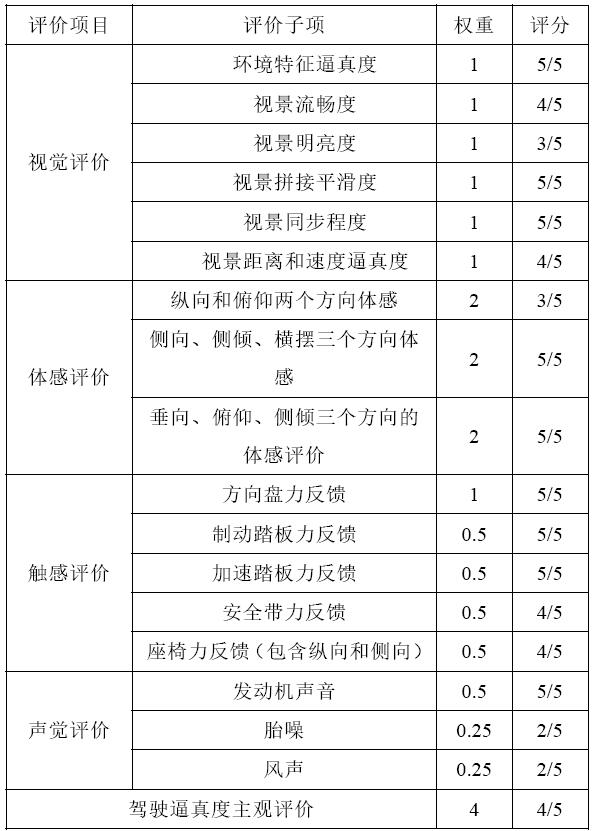
根据文中所建立的汽车驾驶模拟器主客观评价方法对一款驾驶模拟器进行逐项评价。评价的结果如下表1和表2。同时设置了各个评价项目的权重,权重的设置是根据该项评价项目的重要程度。其中评分中分子为所得分,分母为该项评分满分的分值。
表1主观评价结果
因篇幅关系,不再将评价子项的客观评价结果一一列出,仅按照大类列出。
表2客观评价结果

下面列出了部分硬件性能数据作为客观评价结果的评分依据,如表3、表4和表5。
表3投影仪性能参数

表4运动平台单方向工作行程

表5运动平台最大速度和最大加速度

前文提到车辆在运行过程中,常常不是单一运动形式,而是复合运动形式,例如转向时,同时存在横摆运动和侧向运动的复合运动,因此需要判断复合运动的行程,如图9 所示。有一些平台在单一方向上的运动行程满足要求,但是复合运动行程较小。
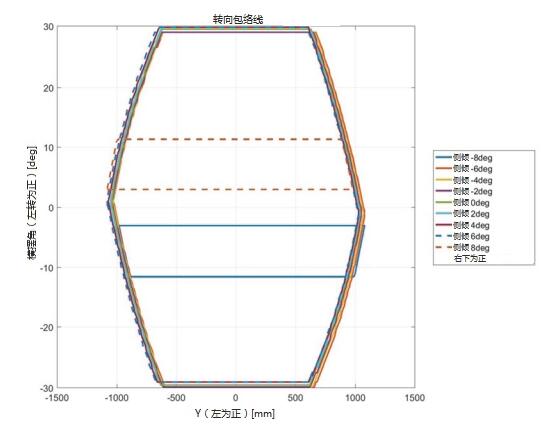
图9转向时横摆运动和侧向运动的复合运动
运动平台的频率响应特性是运动平台十分重要的性能特征。图10 中描述的运动平台频率响应特性的测量方法。测量前,将加速度计和陀螺仪安装在驾驶员座椅正下方的运动平台上。测试时,选择合适的负载,如200kg。输入信号推荐采用对数正弦扫频信号。在输入输出幅频特性曲线上,选取-3dB时的频率点,作为频率带宽;在输入输出相频特性曲线上,选取90 °相位滞后的频率点,以此计算滞后时间。

图10运动平台频率响应测量方法表6
6运动平台各个方向频率特性和延迟时间


表6中,运动平台的频响特性参数为负载在200kg下的测量数据。
6、结论
本文回顾了驾驶模拟器的发展历程,研究了国内外驾驶模拟器评价方法,在此基础上总结并提出了一套汽车驾驶模拟器主客观评价方法,并将该方法应用在了一款驾驶模拟器实际评价中,结果表明该评价方法能够较为合理的反映驾驶模拟器性能,而且可操作性强。当前在评价过程中所选择的权重,随着研究的深入,以及不同的需求,可以进行适当的调整,这也是后续可以继续展开的研究点。
参考文献
[1]LEEWS,KIMJH,ChoJH.Adrivingsimulatorasavirtualrealitytool[C].IEEEInternationalConferenceonRoboticsandAutomation.Leuven,Belgium:IEEE,1998:71-76
[2]Wojcik,C.K.&Hulbert,S.F.Thedrivingsimulator–aresearchtool[J].Papernumber65-WA/HUF-13,AmericanSocietyofMechanicalEngineers,1965
[3]McKnight,A.J.&Hunter,H.G.Anexperimentalevaluationofadriversimulatorforsafetytraining[J].HumanResourcesResearchOrganization,Alexandria,VA,USA,1966:No.66-9
[4]Drosdol,J.&Panik,F.TheDaimler-Benzdrivingsimulator:atoolforvehicledevelopment[R].SAETechnicalPaperSeries850334,SocietyofAutomotiveEngineers,Warrendale,PA,USA,1985
[5]Suetomi,T.,Horiguchi,A.,Okamoto,Y.&&Hata,S.TheDrivingSimulatorwithlargeamplitudemotionsystem[R].SAeTechnicalPaperSeries910113.SocietyofAutomobileEngineers,Warrendale,PA,USatheDesignandValidationofDrivingSimulators,Valencia,Spain,21stMay1996.
[6]Bertollini,G.P.,Johnston,C.M.,Kuiper.J.W.,Kukula,J.C.,Kulczycka,M.A.&Thomas,W.E.TheGeneralMotorsdrivingsimulator[R].SocietyofAutomobileEngineers,Warrendale,PA,USA,1994
[7]Greenberg,J.A.&&Park,T.J.TheForddrivingsimulator[R].SAeTechnicalPaperSeries940176.SocietyofAutomobileEngineers,Warrendale,PA,USA,1994
[8]Reymond,G.&&Kemeny,A.MotioncueingintheRenaultdrivingsimulator[J].VehicleSystemDynamics,2000:34(4),pp.249-259.
[9]Soma,H.,Hiramatsu,K.,Satoh,K.andUno,H.SystemarchitectureoftheJARidrivingsimulatoranditsvalidation[C].ProceedingsoftheSymposiumontheDesignandValidationofDrivingSimulators,Valencia,Spain,21stMay1996
[10]Duncan,B.CalibrationtrialsoftheTRldrivingsimulator[R].TRlReportPA/3079/95.TransportResearchLaboratory,Crowthorne,U.K,1995
[11]Freeman,J.S.,WatsonG.,Papelis,Y.E.,Lin,T.C.,Tayyab,A.,Romano,R.A.&Kuhl,J.G.TheIowaDrivingSimulator:animplementationandapplicationoverview[R].SAeTechnicalPaperSeries950174.SocietyofAutomobileEngineers,Warrendale,PA,USA,1995
[12]段春光.汽车性能模拟器逼真度关键问题研究[D].吉林大学,2017DuanChunguang.Researchonkeyissuesoffidelityofautomobileperformancesimulator[D].JilinUniversity,2017
[13]Chen,L.D.,Papelis,Y.,Watson,G.andSolis,D.(2001).NADsattheUniversityofIowa:atoolfordrivingsafetyresearch[C].Proceedingsofthe1stHuman-CenteredTransportationSimulationConference,Iowa,4th––7thNovember2001
[14]Suikat,R(2005).ThenewdynamicdrivingsimulatoratDLR[C].ProceedingsoftheDrivingSimulationConference-NorthAmerica,Orlando,30thNovember––2ndDecember2005
[15]AnsibleMotionLimited.AnsibleMotionbrochure[EB/OL].https://www.ansiblemotion.com/ansible-motion-driver-in-the-loop-automotive-simulator-brochure,2019
[16]VI-gradeGmbH.DimDYNAMIcSimulator[EB/OL].https://www.vi-grade.com/en/products/dim-dynamic-simulator/,2019
[17]AnthonyBestDynamicsLtd.ABd aVDsBrochure[EB/OL].https://www.abdynamics.com/en/applications/lab-and-track-testing/driver-in-the-loop-simulation,2019
[18]AndrewJamson.MotionCueinginDrivingSimulatorsforResearchApplications[D].TheUniversityofLeedsInstitute,20100
[19]Harms,L.(1993).Drivingperformanceonarealroadandinadrivingsimulator:resultsofavalidationstudy[R].InGale,A.G.,Brown,I.D.,Haslegrave,C.M.&&Taylor,S.P.(Eds.):VisioninVehiclesIV.Elsevier,NorthHolland.
[20]Siegler,I.,Reymond,G.,Kemeny,A.&&Berthoz,A.Sensorimotorintegrationinadrivingsimulator:contributionofmotioncueinginelementarydrivingtasks[C].ProceedingsoftheDrivingSimulationConference(DSC2001),5th––7thSeptember2001
作者:徐亮
单位:中国汽车技术研究中心有限公司
学位:工学博士
研究方向:智能网联汽车测试
联系方式:022-84379666-6872
E-mail:xuliang@catarc.ac.cn
单位:中国汽车技术研究中心有限公司
[摘要]驾驶模拟器的种类较多,成本较贵,如何根据使用需求选择合适的驾驶模拟器是当前很多汽车企业面临的难题。而对驾驶模拟器进行科学和系统性的评价是进行汽车驾驶模拟器采购选型的基础。当前国内外还缺乏系统性的汽车驾驶模拟器评价方法。本文重点研究并提出了一套汽车驾驶模拟器主客观评价方法,并将主客观评价评分结果进行加权综合得到总体评分。所提出的评价方法可以应用在驾驶模拟器选型之中,为企业进行驾驶模拟器采购以及后续的设备检定提供参考依据。
关键词:驾驶模拟器,评价,主客观,逼真度
前言
汽车驾驶模拟器一般由车辆实时仿真系统、运动系统、视景系统、声音模拟系统、运行监控系统、集成信息管理系统和数据传输系统组成[1] 。它将真实的驾驶员与虚拟车辆、虚拟场景组成驾驶员在环测试系统,通过逼真地模拟车辆在各种工况下的车辆状态,并通过视觉、体感、触感反馈和声效等方式让驾驶员对被测目标进行主客观性能评估。其特点在于避免了对真实驾驶员行为和驾驶员主观评价的建模,而当前这两方面是很难有效建模。通过这种方式,能够让整套测试系统与实车测试结果更为一致,从而实现更为有效的测试。相较实车测试,除了缩短测试成本和周期以外,同时测试可控性和可观性更强,能够设置各种测试场景,可以实现危险极限测试,能存储更为丰富的数据类型。
通过调研国内外的研究现状表明,目前有关驾驶模拟器的评价研究较少,给驾驶模拟器的选型带来了困难。通过实地考察多台驾驶模拟器,以及调研国内外文献,总结并提出了一套汽车驾驶模拟器主客观评价方法。
1、驾驶模拟器发展现状
汽车驾驶模拟器的研究很早就已经开展,最早是从上个世纪60年代开始。第一个阶段是静态驾驶模拟器阶段:在1965年,美国机械工程师协会出版一篇报告,报告[2]中提到驾驶员坐在一个静止的驾驶舱内,舱前是投影仪系统,放映真实场景的彩色电影。一年后,美国人力资源研究组织开发了一套类似的系统[3]。
第二个阶段是动态驾驶模拟器阶段。这个阶段,驾驶舱可以具备较小行程的运动。1970年代早期,德国汽车公司大众有限公司开发的驾驶模拟器,是采用一块屏幕安装在驾驶员座椅前,没有驾驶舱,驾驶员座椅放置在一个运动机构上,具备俯仰、侧倾和横摆三个自由度。1980年,美国交通和联邦公路管理局,决定通过资助基于计算机网络组建完全交互式驾驶模拟器的可行性研究。1985年,戴姆勒-奔驰在柏林-马林费尔德研究中心[4],建设了第一次以六足并联机构为运动基础的驾驶模拟器。从此,在1990年代,马自达[5]、通用[6]、福特[7]、雷诺[8]、宝马等车企都开始建设具备全运动系统的交互式仿真的驾驶模拟器。同时期,多家国家研究机构,如日本汽车研究所[9]、英国交通研究实验室[10]等,也开始纷纷建设自家的驾驶模拟器。另外,许多大学也开始建设驾驶模拟器,比较有代表性的是美国爱荷华大学驾驶模拟器[11],它采用的是波音737飞行模拟器所使用的六足运动系统。中国吉林大学于1996年建成了包含6个自由度的驾驶模拟器[12],用于车辆性能设计、车载控制系统开发等方面。
图1 NADS驾驶模拟器
第三个阶段是带导轨大行程动态驾驶模拟器,即大幅增加了驾驶舱水平运动的行程(包含前向、侧向、横摆三个方向)。在爱荷华大学开发的驾驶模拟器基础上,TRW公司对此进行了改进,并将改进后的驾驶模拟器命名为“国家高级汽车驾驶模拟器(NADS)[13]”。如图1所示,它将驾驶舱放置在一个直径为7.3 米的圆形舱内,圆形舱则安装在六足运动机构上,六足运动机构下是双轴滑轨,具备19 米的水平纵向和侧向行程,以及330°的横摆角行程。丰田驾驶模拟器受NADS S驾驶模拟器影响,在东富士技术中心的驾驶模拟器采用类似的方案,不同的是在侧向运动行程上增至25米,纵向行程上增至35米。
近些年,涌现越来越多各种设计类型的驾驶模拟器,主要体现在运动平台的设计越来越多样化。德国航天航空局(DLR R)设计的驾驶模拟器[14]如图2所示。Ansible motion公司的驾驶模拟器[15]如图3 所示。VI-grade驾驶模拟器[16]如图4 所示。Anthony Best Dynamics(ABD)驾驶模拟器[17]如图5所示。其中DLR的这种设计是将作动器的铰接到驾驶舱顶部,使旋转点尽可能接近驾驶员头部。Ansible motion模拟器,将运动平台分成了三层,从而将车辆六向运动由三层运动机构来实现。VI-grade 的驾驶模拟器采用两层,下部采用三足机构,进行低频大行程运动,上部采用六足机构,进行高频小行程运动。ABD驾驶模拟器没有采用分层的运动系统,而是采用8 个楔形机构进行驱动,运动系统放置在一个长导轨通过磁力驱动,可实现侧向较大范围运动。
2、驾驶模拟器评价方法国内外研究现状
Ansible motion 的工程师Kia认为驾驶模拟器的评价可以从两个方面来评价,一方面从驾驶模拟器各个软硬件组成部分评价,另一方面通过试驾进行评价。提到软硬件系统可分为运动系统、应用工具、视景系统、计算机系统、音频系统等几大类进行评价;其中,运动系统包含评价子类有运动平台、驾驶舱内辅助运动机构(座椅、主动安全带),应用工具包含联合仿真环境、图像生成、数据存储等。试驾主观评价,主要通过平顺性、操控性、制动性等几大类评价。
Anthony Best Dynamics 的工程师Adrian博士重点提到了驾驶模拟器运动平台的性能评价和一些试驾项目以进行驾驶模拟器性能评估。关于运动平台的性能,提出通过行程、频率响应特性、延迟时间、线性度、一致性、摩擦、噪音、故障率等方面进行评价。行程这一方面,需要结合评价车辆实际运动规律,即车辆在不同自由度上的行程范围,同时需要考虑复合行程,即运动平台同时在进行多个方向的运动时的行程范围。频率响应特性也需要结合车辆各个方向实际频率分析需求。延迟时间需要尽可能小,尤其是需要小于人类所能感受的滞后时间。关于如何进行驾驶模拟器试驾,以便进行评估,Adrian 博士提到首先需要有经验的驾驶员进行足够长时间的驾驶,这样才能有效评估。质量好的驾驶模拟器,当车辆参数改变幅度较小时,例如1-2% ,试驾时就能让驾驶员感受到;质量不好的驾驶模拟器,即使车辆参数改动幅度很大时,很多时候驾驶员试驾时也不能感受到。
VI-grade运动平台设计单位鹭宫制作所伊荣生认为,关于运动平台的评价,低频受行程限值,中频受速度限值,高频受加速度限值,如果各个数值越大,对运动体感的依赖就越小。同时提出平台设计的行程,需要分析汽车在各种道路驾驶时,三个自由度上(Z、Roll、Pitch)的行程范围。另外,还分析了车辆在一般驾驶情况下,和一般路面行驶时,各个方向的加速度范围。因此需要分析运动平台的加速度范围满足车辆一般驾驶情况下的加速度要求。
吉林大学管欣教授多年来一直从事驾驶模拟器的开发与研究,提出模拟器逼真度[12]的概念,用来描述模拟器驾驶感觉和实车驾驶感觉的一致情况。吉林大学段春光博士[12]认为,改进车辆动力学模型,是提升模拟器逼真度的关键环节之一。通过将驾驶模拟器中的整车动力学模型仿真数据与实车场地试验数据进行对比是评价驾驶模拟器逼真度的方法之一。段博士主要进行了滑行试验、纵向加速试验、制动试验、操纵稳定性试验方面的对比。另外,分析了影响模拟器逼真度几个方面:车辆动力学模型、仿真路面环境、硬件工作能力及子系统匹配。
英国利兹大学的Andrew 博士[18]研究了几个驾驶模拟器关键子系统对驾驶模拟器有效性的影响,重点包含视景系统、前庭系统、听觉系统。视景系统方面,显示质量非常重要,包含画面分辨率,更新频率,视角。这对于驾驶员估计车速、物体之间距离、车辆朝向以及侧向控制有着重要意义。前庭系统方面,前庭系统主要与驾驶模拟器的运动系统相关,Harms[19],Duncan[10]等研究表明,当运动平台固定式,驾驶员在驾驶模拟器上相对真实道路驾驶时,在车道上位置变化更大;Siegler,Reymond[20]等人研究表明,与仅提供视觉信息相比,当运动平台存在横向运动提示时,驾驶员会执行更大的转向。关于音频对驾驶模拟器试驾时驾驶员行为的影响还不是很明显。
3、驾驶模拟器主观评价方法
主观评价重点通过视觉、体感、触感、声觉等分项评价,同时包含通过试驾进行驾驶逼真度综合评价。
3.1 视觉评价
驾驶模拟器多采用环幕投影显示系统,根据环形屏幕角度的大小,通常有120 °至360° 不等。多通道虚拟三维投影显示系统是目前非常流行的一种具有高度沉浸感的虚拟现实显示系统,该系统以多通道视景同步技术、数字图像边缘融合技术、多通道亮度和色彩平衡技术为支撑。
3.1.1 环境特征逼真度
环境特征包含两个方面:静态环境特征和动态环境特征。下面展示了不同软件中渲染后的视景效果。评价时,根据环境特征逼真度,按照五分制分为非常差(0-1)、差(0-2)、中(2-3)、良(3-4)、优(4-5)。其中,环境逼真度中如图6所示,环境逼真度优如图7 所示。
3.1.2 视景流畅度
视景流畅度的评价主要是观察视景的变化是否流畅,是否会出现卡顿现象,帧与帧的图像是否能够平滑过渡。流畅度主要与视景计算工作站的计算性能相关。根据视景流畅度,按照五分制进行评分。
3.1.3 视景明亮度
视景明亮度,主要观察并比较视景系统在额定工作情况下,视景效果和真实环境的明亮程度,过于明亮和过于昏暗都是不合适的。按照五分制进行评分,越接近真实,评分越高。
3.1.4 视景拼接平滑度
数字图像显示在屏幕上,是由多块数字图像拼接而成,重点关注环形屏幕数字图像之间拼接处是否平滑,有无相互覆盖、重叠、有缝隙等现象,以及明亮程度是否一致等。同样按照五分制进行评分。
3.1.5 视景同步程度
驾驶模拟器显示时,常采用多通道投影技术,当出现不同步时,在试驾时会发现环幕有些区域的图像的帧已经更新,有些区域还未更新。这一项性能的主观评分按照五分制评分。
3.1.6 视景距离和速度逼真度
视景的距离和速度逼真度也是很重要的一项视景指标。在评价视景距离逼真度时,比较视景中的道路两旁的电线杆与实际道路两旁
相同距离的电线杆,判断视觉感受上是否一致。在评价视景速度逼真度时,主要根据驾驶舱内仪表盘上的速度信息和环幕中的图像变化,主观评价是否与实车相应速度下的感受一致。这一项性能评分采用五分制。
3.2体感评价
体感是通过驾驶员耳朵内前庭进行感受,前庭系统能够感受线性加速度和角加速度。当驾驶员在驾驶模拟器中驾驶时,运动平台会模拟在实车道路上驾驶时的车体运动。
在进行该项评价时,需要在空间比较开阔的虚拟试验场进行。下面所有的评价都按照五分制评分。
3.2.1 纵向和俯仰两个方向的体感评价
纵向和俯仰两个方向的体感评价,主要通过直线加速和制动来进行评价。评价时,初始车速为40km/h 和80km/h,然后进行紧急制动(1s内制动到底)和缓慢制动(10s 制动到底), 进行加速(1s 内加速到底)和缓慢加速(10s 内加速到底)。在这些试验中,评价纵向和俯仰两个方向的体感和实车驾驶时的一致性。
3.2.2 侧向、侧倾、横摆三个方向的体感评价
侧向、侧倾、横摆三个方向的体感评价,主要通过操纵转向进行评价,在虚拟动态广场上进行稳态圆周试验,固定转向角度90 °不变,逐渐增加车速。在虚拟试验场上,保持车速在40km/h左右,进行绕桩试验(或称蛇形试验)。在此试验中,评价侧向、侧倾、横摆三个方向的体感与实车驾驶时的一致性。
3.2.3 垂向、俯仰、侧倾三个方向的体感评价
垂向、俯仰、侧倾三个方向的体感评价,主要通过在虚拟试验场上进行平顺性试验评价,如图8 所示。固定车速30km/h,在平顺性测试试验场上进行试驾,评价垂向、俯仰、侧倾三个方向的体感与实车驾驶时的一致性。
图8平顺性虚拟试验场
3.3 触感评价
触感反馈主要通过方向盘力反馈、制动踏板力反馈、加速踏板力反馈、座椅和安全带力反馈来实现。为了让驾驶员沉浸感更强,在驾驶舱内所受的力也需尽量保持和实车驾驶时一致。而所有力反馈中,方向盘力反馈最为重要,驾驶员在试驾时需要判断是否存在方向盘的回正力矩和路感反馈力矩。
方向盘力反馈,主要进行三种工况下试验评价:1.原地转向;2. 蛇形试验;3. 比利时路面上试验。
制动踏板力反馈、加速踏板力反馈、座椅纵向力反馈、安全带力反馈,与纵向和俯仰两个方向的体感评价试验工况一样,在此过程中进行制动踏板力反馈、加速踏板力反馈、座椅纵向力反馈和安全带力反馈评价。
座椅侧向力反馈,和侧向、侧倾、横摆三个方向的体感评价试验工况一样,在此过程中进行座椅侧向力反馈评价。
3.4 声觉评价
声觉评价最重要是评价发动机的声音,胎噪,风声等。
在评价发动机声音,将档位置于空挡,然后逐渐加大加速踏板行程,判断发动机声音是否增加。
在评价胎噪和风声时,将档位置于D 档,然后逐渐加大加速踏板行程,在车速逐渐增加时,观察胎噪和风声是否随之增加。
3.5 驾驶逼真度主观评价
驾驶逼真度主观评价是一种综合评价,是对驾驶模拟器视觉评价、体感评价、触感评价、声觉评价的综合。
在进行该项评价时,将选择城市道路虚拟场景、高速公路虚拟场景、乡村道路虚拟场景、山地道路虚拟场景。让驾驶员在四种类型的虚拟场景中进行驾驶。最后比较与实际道路驾驶的主观感受。与实际道路越接近,认为驾驶逼真度越高。此项评分也采用五分制。
4、驾驶模拟器客观评价方法
对驾驶模拟器的客观评价,主要是基于驾驶模拟器相关子系统的性能参数进行评价。驾驶模拟器的客观评价分为两类,硬件系统和软件系统。
4.1 硬件系统
4.1.1 运动平台
关于运动平台,需要根据实际的平台性能参数和相关测试报告进行评价。主要评价如下关键方面:1. 行程范围;主要判断驾驶模拟器运动平台的各个自由度方向行程是否大于乘用车一般驾驶时行程。其中乘用车在驾驶时,垂向上的行程大多在±100mm 范围内,侧倾方向上的行程大多小于5°,俯仰方向的行程大多小于5°,考虑体感运动算法的影响,侧倾方向和俯仰方向的行程大于6°即可满足要求;
2. 复合运动行程范围;主要判断运动平台在进行几个方向复合运动时(急加速、制动、转向等行驶工况下)的行程范围。3. 加速度范围;主要判断驾驶模拟器的运动平台各个方向加速度是否大于乘用车驾驶时的车体加速度。研究表明:乘用车在行驶时,前后加速度一般小于10m/s2;左右加速度一般小于5m/s2;垂向加速度一般小于10m/s2;4. 频率响应带宽;主要判断驾驶模拟器的运动平台在各个方向上的频率带宽是否满足要求。5. 频响一致性;主要判断驾驶模拟器的运动平台在不同行程上,频率响应曲线是否较为一致。6.延迟性能;主要判断驾驶模拟器的运动平台在不同方向上的延迟响应时间。7. 平台负载能力;在不影响平台运动响应性能时,负载能力是越大越好,意味着驾驶舱里面可以装置更多设备;8.噪音;主要判断运动平台运动时,噪音强度大小。9. 平台故障率。主要判断运动平台在10 年内的故障发生情况。
4.1.2 驾驶舱
驾驶舱也是关系到驾驶模拟器沉浸感的关键系统之一。主要通过如下几个方面进行评价:1. 驾驶员操纵机构(制动踏板、加速踏板、换挡机构、方向盘)是否与实车一致。2. 驾驶舱内仪表盘显示的功能是否和实车仪表盘一致。3. 是否安装后视镜。4. 是否有驾驶员状态监测系统。5. 是否安装转向灯操作杆。
4.1.3 视景硬件系统
视景硬件系统,主要包含环屏、投影仪、图像渲染工作站。在进行视景系统客观评价时,主要评价如下方面:1. 投影仪的刷新频率。2. 环形屏幕上的画面分辨率。3. 投影仪最大亮度。
4.1.4 实时仿真计算机
实时计算机的计算性能决定了仿真模型和图像渲染的计算时间。计算性能出众的实时计算机,将会有效缩短延迟时间。实时仿真计算机的评价主要通过:1.CPU 核数;2.CPU 主频;3.I/O接口类型和数量。
4.2 软件系统
4.2.1 中控系统
关于中控系统,主要评价功能是否齐全,是否包含如下功能:1. 仿真监控与管理功能;
2. 数据记录和管理功能;3.配置各个子系统的功能;4. 开启各个系统的功能;5. 系统故障诊断功能。
4.2.2 仿真建模软件关于仿真建模软件,主要评价内容如下:
1. 仿真模型是否齐全,如车辆动力学模型、驾驶员模型、车辆传感器模型、车辆控制器模型、交通环境模型、道路模型。2. 仿真模型能否实时仿真。3.软件兼容性。4. 软件是否支持模块化和用户自定义。
4.2.3 运动平台控制和体感运动算法软件
运动平台控制软件对于实现运动平台的准确快速控制是非常重要的。重点评价项目包含:1. 体感运动算法类型是否丰富,以便适应用户不同的应用需求;2. 是否支持用户配置体感运动算法参数。
4.2.4 视景渲染软件
视景渲染软件的评价项目包含:1. 是否能实现多通道同步高清输出。2. 是否支持各种天气配置。3. 是否支持动态阴影效果;4. 是否支持物理光源仿真,如车辆各种灯光效果模拟;
5. 是否支持反光效果,如湿滑路面反光。6.是否包含物理表面材质建模,从而支持雷达模型的探测。7. 虚拟仿真场景,交通元素和道路类型是否覆盖了中国典型道路交通环境。
5、驾驶模拟器主客观评价方法应用
案例
根据文中所建立的汽车驾驶模拟器主客观评价方法对一款驾驶模拟器进行逐项评价。评价的结果如下表1和表2。同时设置了各个评价项目的权重,权重的设置是根据该项评价项目的重要程度。其中评分中分子为所得分,分母为该项评分满分的分值。
表1主观评价结果
因篇幅关系,不再将评价子项的客观评价结果一一列出,仅按照大类列出。
表2客观评价结果
下面列出了部分硬件性能数据作为客观评价结果的评分依据,如表3、表4和表5。
表3投影仪性能参数
表4运动平台单方向工作行程
表5运动平台最大速度和最大加速度
前文提到车辆在运行过程中,常常不是单一运动形式,而是复合运动形式,例如转向时,同时存在横摆运动和侧向运动的复合运动,因此需要判断复合运动的行程,如图9 所示。有一些平台在单一方向上的运动行程满足要求,但是复合运动行程较小。
图9转向时横摆运动和侧向运动的复合运动
运动平台的频率响应特性是运动平台十分重要的性能特征。图10 中描述的运动平台频率响应特性的测量方法。测量前,将加速度计和陀螺仪安装在驾驶员座椅正下方的运动平台上。测试时,选择合适的负载,如200kg。输入信号推荐采用对数正弦扫频信号。在输入输出幅频特性曲线上,选取-3dB时的频率点,作为频率带宽;在输入输出相频特性曲线上,选取90 °相位滞后的频率点,以此计算滞后时间。
图10运动平台频率响应测量方法表6
6运动平台各个方向频率特性和延迟时间
表6中,运动平台的频响特性参数为负载在200kg下的测量数据。
6、结论
本文回顾了驾驶模拟器的发展历程,研究了国内外驾驶模拟器评价方法,在此基础上总结并提出了一套汽车驾驶模拟器主客观评价方法,并将该方法应用在了一款驾驶模拟器实际评价中,结果表明该评价方法能够较为合理的反映驾驶模拟器性能,而且可操作性强。当前在评价过程中所选择的权重,随着研究的深入,以及不同的需求,可以进行适当的调整,这也是后续可以继续展开的研究点。
参考文献
[1]LEEWS,KIMJH,ChoJH.Adrivingsimulatorasavirtualrealitytool[C].IEEEInternationalConferenceonRoboticsandAutomation.Leuven,Belgium:IEEE,1998:71-76
[2]Wojcik,C.K.&Hulbert,S.F.Thedrivingsimulator–aresearchtool[J].Papernumber65-WA/HUF-13,AmericanSocietyofMechanicalEngineers,1965
[3]McKnight,A.J.&Hunter,H.G.Anexperimentalevaluationofadriversimulatorforsafetytraining[J].HumanResourcesResearchOrganization,Alexandria,VA,USA,1966:No.66-9
[4]Drosdol,J.&Panik,F.TheDaimler-Benzdrivingsimulator:atoolforvehicledevelopment[R].SAETechnicalPaperSeries850334,SocietyofAutomotiveEngineers,Warrendale,PA,USA,1985
[5]Suetomi,T.,Horiguchi,A.,Okamoto,Y.&&Hata,S.TheDrivingSimulatorwithlargeamplitudemotionsystem[R].SAeTechnicalPaperSeries910113.SocietyofAutomobileEngineers,Warrendale,PA,USatheDesignandValidationofDrivingSimulators,Valencia,Spain,21stMay1996.
[6]Bertollini,G.P.,Johnston,C.M.,Kuiper.J.W.,Kukula,J.C.,Kulczycka,M.A.&Thomas,W.E.TheGeneralMotorsdrivingsimulator[R].SocietyofAutomobileEngineers,Warrendale,PA,USA,1994
[7]Greenberg,J.A.&&Park,T.J.TheForddrivingsimulator[R].SAeTechnicalPaperSeries940176.SocietyofAutomobileEngineers,Warrendale,PA,USA,1994
[8]Reymond,G.&&Kemeny,A.MotioncueingintheRenaultdrivingsimulator[J].VehicleSystemDynamics,2000:34(4),pp.249-259.
[9]Soma,H.,Hiramatsu,K.,Satoh,K.andUno,H.SystemarchitectureoftheJARidrivingsimulatoranditsvalidation[C].ProceedingsoftheSymposiumontheDesignandValidationofDrivingSimulators,Valencia,Spain,21stMay1996
[10]Duncan,B.CalibrationtrialsoftheTRldrivingsimulator[R].TRlReportPA/3079/95.TransportResearchLaboratory,Crowthorne,U.K,1995
[11]Freeman,J.S.,WatsonG.,Papelis,Y.E.,Lin,T.C.,Tayyab,A.,Romano,R.A.&Kuhl,J.G.TheIowaDrivingSimulator:animplementationandapplicationoverview[R].SAeTechnicalPaperSeries950174.SocietyofAutomobileEngineers,Warrendale,PA,USA,1995
[12]段春光.汽车性能模拟器逼真度关键问题研究[D].吉林大学,2017DuanChunguang.Researchonkeyissuesoffidelityofautomobileperformancesimulator[D].JilinUniversity,2017
[13]Chen,L.D.,Papelis,Y.,Watson,G.andSolis,D.(2001).NADsattheUniversityofIowa:atoolfordrivingsafetyresearch[C].Proceedingsofthe1stHuman-CenteredTransportationSimulationConference,Iowa,4th––7thNovember2001
[14]Suikat,R(2005).ThenewdynamicdrivingsimulatoratDLR[C].ProceedingsoftheDrivingSimulationConference-NorthAmerica,Orlando,30thNovember––2ndDecember2005
[15]AnsibleMotionLimited.AnsibleMotionbrochure[EB/OL].https://www.ansiblemotion.com/ansible-motion-driver-in-the-loop-automotive-simulator-brochure,2019
[16]VI-gradeGmbH.DimDYNAMIcSimulator[EB/OL].https://www.vi-grade.com/en/products/dim-dynamic-simulator/,2019
[17]AnthonyBestDynamicsLtd.ABd aVDsBrochure[EB/OL].https://www.abdynamics.com/en/applications/lab-and-track-testing/driver-in-the-loop-simulation,2019
[18]AndrewJamson.MotionCueinginDrivingSimulatorsforResearchApplications[D].TheUniversityofLeedsInstitute,20100
[19]Harms,L.(1993).Drivingperformanceonarealroadandinadrivingsimulator:resultsofavalidationstudy[R].InGale,A.G.,Brown,I.D.,Haslegrave,C.M.&&Taylor,S.P.(Eds.):VisioninVehiclesIV.Elsevier,NorthHolland.
[20]Siegler,I.,Reymond,G.,Kemeny,A.&&Berthoz,A.Sensorimotorintegrationinadrivingsimulator:contributionofmotioncueinginelementarydrivingtasks[C].ProceedingsoftheDrivingSimulationConference(DSC2001),5th––7thSeptember2001
作者:徐亮
单位:中国汽车技术研究中心有限公司
学位:工学博士
研究方向:智能网联汽车测试
联系方式:022-84379666-6872
E-mail:xuliang@catarc.ac.cn







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
