




 广告
广告





















































长距和短距激光雷达之间的差异与不同应用领域
2021-01-09 00:47:55· 来源:Astroys

大多数公司都在开发远距激光雷达,同时也有些公司在开发短距的固态传感器。当前的汽车雷达市场也有类似的情况:使用多个芯片组的单个前向远距雷达用于支持距离预
大多数公司都在开发远距激光雷达,同时也有些公司在开发短距的固态传感器。
当前的汽车雷达市场也有类似的情况:使用多个芯片组的单个前向远距雷达用于支持距离预警应用,例如ACC、AEB和PCS(Pre-crash safety);而两个均使用单个CMOS芯片组的后向的短距雷达用于支持盲点检测应用,其中包括RCTA(Rear cross traffic alert),以及支持前角警报和AEB交界处的新型的前向传感器。
然而,在许多情况下,激光雷达平台的设计已经开发出来,以便客户可以根据自己的要求配置传感器。因此,在某些情况下,可以使用同一平台来开发支持高速公路巡航控制的高激光功率、远距、窄FoV的激光雷达,以及检测行人并支持自动泊车辅助系统的低激光功率、近距、宽FoV的激光雷达。
大陆收购了ASC(Advanced scientific Concepts)开发短距Flash激光雷达,同时还投资了AEye和Blickfeld,后者是开发MEMS微镜扫描激光雷达的公司,更适合于前向的远距离应用。

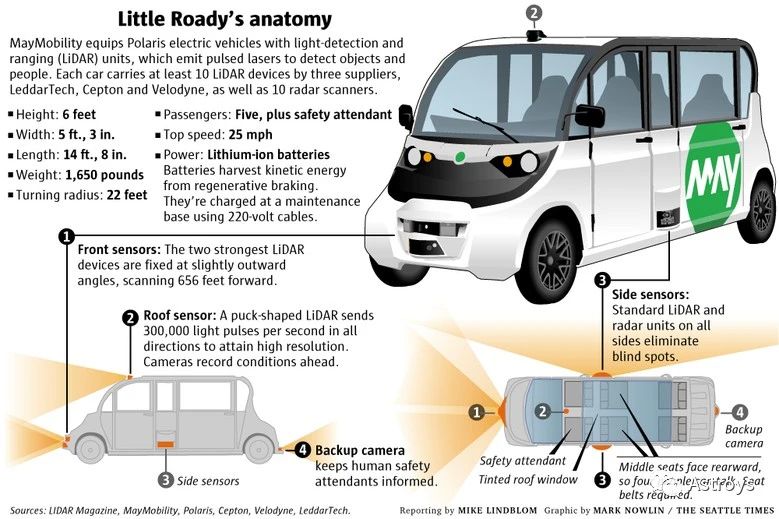
May Mobility在其自动驾驶汽车上使用了前向、远距的Cepton MMT激光雷达和近距的LeddarTech Pixell Flash角激光雷达。
Ouster的全数字方法可配置软件的使用,在单个硬件平台上满足客户和传感应用的不同需求,但可能需要可变的光学元件。

法雷奥将其激光雷达产品分为机械扫描式的远距ScaLa和为短距应用开发的新型“固态”传感器。
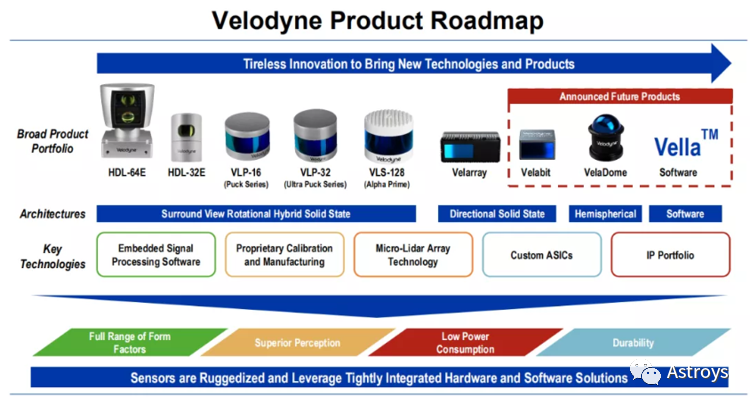
Velodyne为安装在自动驾驶测试车辆车顶的单个或成对使用的激光雷达提供了多种大型旋转式传感器模块,而新的Velabit系列则是较小型的短距旋转式传感器模块,可覆盖靠近自动测试车的任何盲点。对于希望将传感器集成到车身中的客户,Velarray机械扫描式激光雷达能够检测200m外的物体。与短距的180°FoV的VelaDome一样,它基于MLA(Micro-LiDAR阵列)平台。
XenomatiX具有FPA(可能)激光雷达平台,该平台有两个版本,但仍可以进一步配置以满足客户需求。远距XenoLiDAR高速公路的射程为200m,水平FoV为120度,而短距XenoLiDAR Intercity的射程为50m,FoV更宽。

分辨率性能是自动驾驶汽车开发人员在激光雷达中最在意的主要参数。但像Waymo却走上了激光雷达自研的道路,因为外部公司的产品无法满足他们的要求。

当前的汽车雷达市场也有类似的情况:使用多个芯片组的单个前向远距雷达用于支持距离预警应用,例如ACC、AEB和PCS(Pre-crash safety);而两个均使用单个CMOS芯片组的后向的短距雷达用于支持盲点检测应用,其中包括RCTA(Rear cross traffic alert),以及支持前角警报和AEB交界处的新型的前向传感器。
然而,在许多情况下,激光雷达平台的设计已经开发出来,以便客户可以根据自己的要求配置传感器。因此,在某些情况下,可以使用同一平台来开发支持高速公路巡航控制的高激光功率、远距、窄FoV的激光雷达,以及检测行人并支持自动泊车辅助系统的低激光功率、近距、宽FoV的激光雷达。
大陆收购了ASC(Advanced scientific Concepts)开发短距Flash激光雷达,同时还投资了AEye和Blickfeld,后者是开发MEMS微镜扫描激光雷达的公司,更适合于前向的远距离应用。
May Mobility在其自动驾驶汽车上使用了前向、远距的Cepton MMT激光雷达和近距的LeddarTech Pixell Flash角激光雷达。
Ouster的全数字方法可配置软件的使用,在单个硬件平台上满足客户和传感应用的不同需求,但可能需要可变的光学元件。
法雷奥将其激光雷达产品分为机械扫描式的远距ScaLa和为短距应用开发的新型“固态”传感器。
Velodyne为安装在自动驾驶测试车辆车顶的单个或成对使用的激光雷达提供了多种大型旋转式传感器模块,而新的Velabit系列则是较小型的短距旋转式传感器模块,可覆盖靠近自动测试车的任何盲点。对于希望将传感器集成到车身中的客户,Velarray机械扫描式激光雷达能够检测200m外的物体。与短距的180°FoV的VelaDome一样,它基于MLA(Micro-LiDAR阵列)平台。
XenomatiX具有FPA(可能)激光雷达平台,该平台有两个版本,但仍可以进一步配置以满足客户需求。远距XenoLiDAR高速公路的射程为200m,水平FoV为120度,而短距XenoLiDAR Intercity的射程为50m,FoV更宽。
分辨率性能是自动驾驶汽车开发人员在激光雷达中最在意的主要参数。但像Waymo却走上了激光雷达自研的道路,因为外部公司的产品无法满足他们的要求。
- 下一篇:自动驾驶 vs 机器人技术
- 上一篇:特斯拉电动汽车热管理技术发展趋势



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
