




 广告
广告





















































Matlab精细建模之车辆纵向动力学(上)

一直以来,脚主关于建模的态度都是够用就行,能简化则尽量简化。因为简化的模型并不代表简单,刚开始进行某个领域建模时,简化的模型更能让我们抓住其本质,去深入理解这个建模对象。
但是,随着学习的深入,简化的模型可能无法满足更多需要注重细节的仿真研究。此时,基于之前建立的简化模型去拓展模型范围,或者去增加部分模型细节,让模型更加贴合实际,就会变得更加容易,也更加有意义。
脚主将以汽车纵向动力学建模为例,来谈谈怎样做到精细建模。打算分为上下两节来介绍:1)上节:对滚动阻力进行精细建模;2)下节:对纵向力进行精细建模。
下面开始本文的内容:汽车纵向动力学的滚动阻力精细建模。
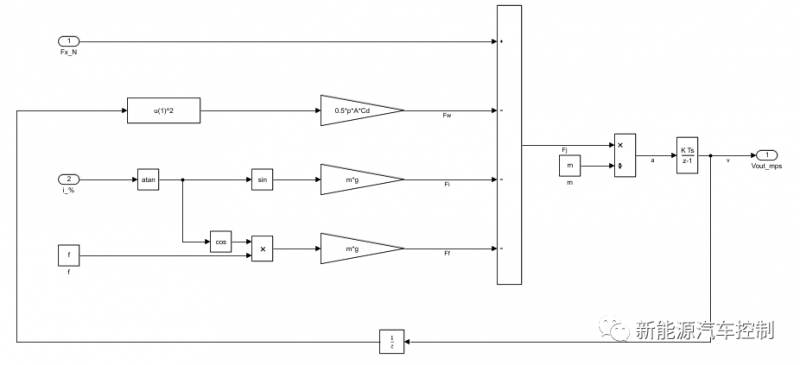
汽车理论给出了汽车纵向动力学的基本公式:Fx = Ff + Fw + Fi +Fj其中Fx、Ff、Fw、Fi、Fj分别代表车辆纵向力、滚动阻力、风阻、坡道阻力、加速阻力。
根据上述公式,我们可以很容易搭建出一个一般的车辆纵向动力学模型1.1,如下图:
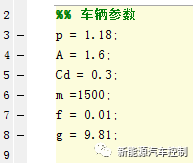
对应的车辆参数如下图,车辆滚阻为mgf=147.15N。
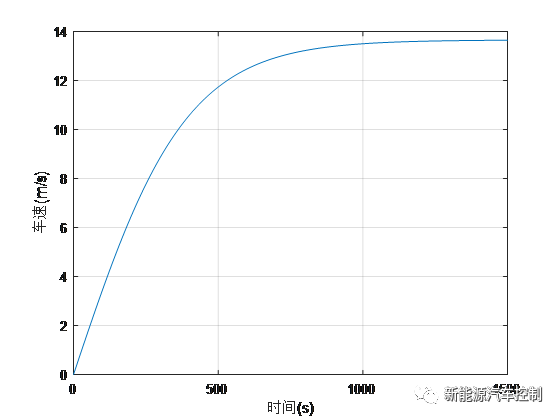
进行如下工况仿真:工况1:驱动力Fx=200N(大于滚阻),坡道i=0,初始车速V=0,滚动阻力f=0.01。
结果如下图,车辆逐渐加速,最终稳定在13.64m/s左右,实现驱动力与风阻、滚阻的平衡,符合预期。
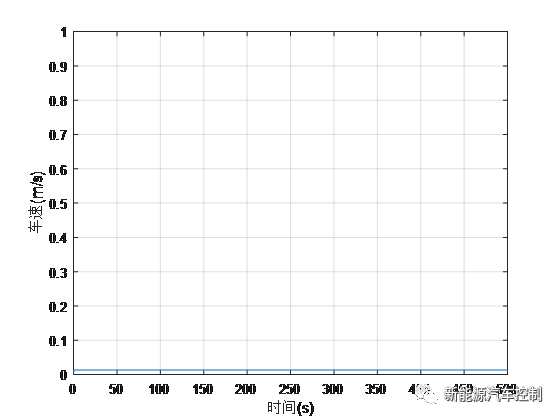
工况2:驱动力Fx=100N(小于滚阻),坡道i=0,初始车速V=0,滚动阻力f=0.01。
结果如下图,理论上驱动力小于滚阻,车辆应该静止,但是实际车辆在反向加速,且加速度越来越大,不符合预期。
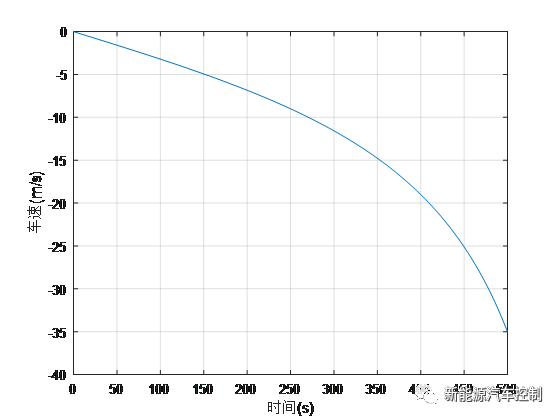
分析可以发现:低车速时车辆反向加速是因为模型1.1的滚阻一直为负值,实际滚阻应该与车辆运动方向相反;随着车速增大加速度越来越大是因为风阻也一直为负值,实际风阻应该与车辆运动方向相反。
于是,我们可以对模型1.1进行优化,得到一个考虑滚阻、风阻方向的车辆纵向动力学模型1.2,如下图:
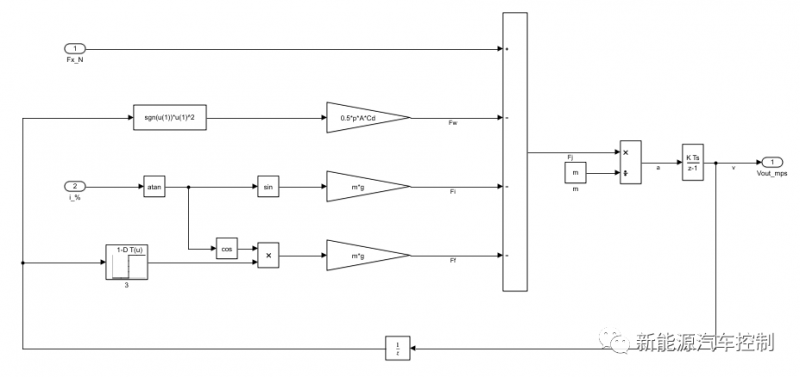
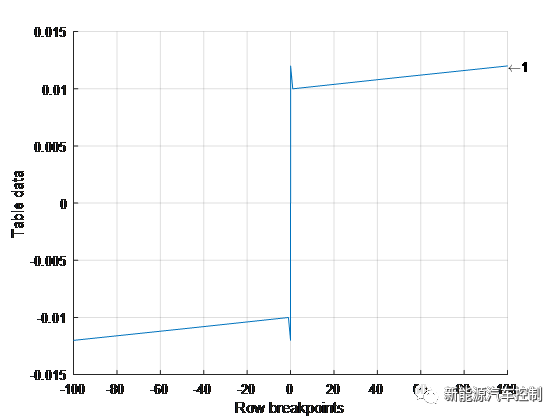
这里近似认为前进和后退风阻一致,滚阻系数暂时通过车速查表的方式来确认方向。
车辆滚阻系数如下图:
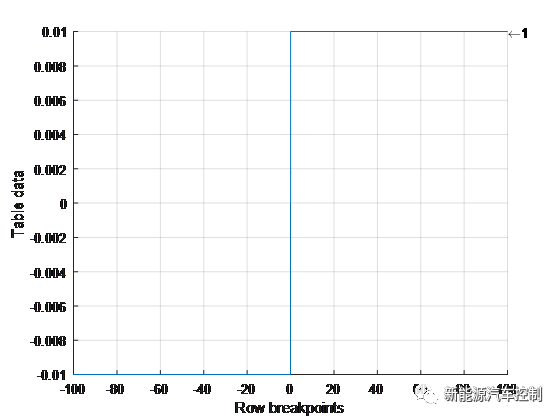
再进行上面的工况2仿真,结果如下图,车速稳定在0.01m/s左右,接近于0,符合预期。
经过优化后的模型2.2,滚阻和风阻模型能基本满足大部分工况的使用,极个别工况例外,例如,车辆蠕行或车辆高速行驶工况。
车辆蠕行起步需要克服的滚阻与车辆稳定蠕行的滚阻差别较大,车辆高速行驶与低速行驶的滚阻也差距很大,如果需要准确地进行车辆起步仿真研究或高车速滚阻模拟,还需要深入考虑摩擦系数与车速的关系。
摩擦力与速度的关系通常可以用下面的曲线拟合:
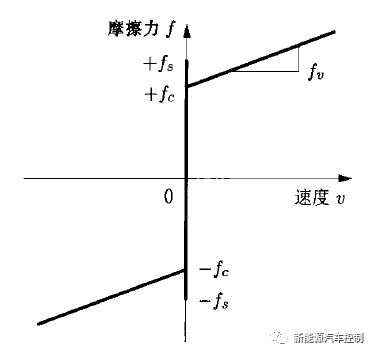
0车速附近,表现为静摩擦力;0车速范围外,表现为库伦摩擦+黏性摩擦,库伦摩擦与正压力相关,基本不变,黏性摩擦随着车速的增大逐渐增大。
于是,我们可以对模型1.2继续进行优化,将其滚阻系数Map修改为下图所示,得到一个考虑滚阻大小的车辆纵向动力学模型1.3,该模型可以满足起步以及高车速工况对滚阻准确度的需求。
图中的关键参数(静摩擦系数、库伦摩擦系数、黏性摩擦系数)是需要经过试验测试确认的。
至此,对滚动阻力的精细建模完成,基本可以满足90%以上的车辆纵向动力学仿真对滚阻的要求。
以上,以汽车纵向动力学中滚动阻力的为例,介绍了精细建模的一些理解。脚主认为,精细建模并不是要求模型必须复杂,是要更加关注模型对实际细节的把握,而这些细节恰好来源于对实际物理过程的经历、理解与思考。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
