




 广告
广告





















































美国交通部发布《自动驾驶汽车综合计划》
2021-01-13 23:27:53· 来源:智车科技

导读1月7日,美国交通部长赵小兰因特朗普的支持者闯进了国会大厦,使美国经历了一场痛苦但却完全可以避免的事件,随即发表声明宣布辞职,她表示,将于1月11日正
导读
1月7日,美国交通部长赵小兰因特朗普的支持者闯进了国会大厦,使美国经历了一场“痛苦但却完全可以避免的事件”,随即发表声明宣布辞职,她表示,将于1月11日正式辞去交通部长职务,但她的团队将继续协助拜登任命的交通部长布蒂吉格(Pete Buttigieg),完成权力交接工作。这成为美国国会骚乱后首名辞职的特朗普政府内阁成员,也是所有当前辞职的美国官员中级别最高的。
不过,就在她离职前,美国交通运输部(DOT)刚刚发布了一份长达38页的《自动驾驶汽车综合计划》(AVCP),进一步指明了美国自动驾驶的发展方向,它是自动驾驶4.0的延申。

赵小兰在文件中表示,这份综合计划制定了美国DOT的多式联运战略,以促进合作和透明度,使监管环境更加现代化,为自动化车辆的安全集成准备运输系统。该计划说明了这部分工作如何超越政府,通过提供真实世界的例子来应对现代交通系统的挑战,业务管理部门是如何合作解决新兴技术应用的需要的。虽然没有人能预测未来,但重要的是通过建立为未来准备一种灵活的方法,优先考虑安全,并鼓励美国的独创性。
该计划以自动驾驶4.0(AV4.0)中所述的原则为基础,确定了实现这一愿景的三个目标或自动驾驶系统(ADS):
1.促进协作和透明度-美国数字技术公司将促进其合作伙伴和利益相关方,包括公众获得明确和可靠的信息, 关于ADS的能力和局限性。
2. 现代化的监管环境-美国DOT将现代化的监管,以消除意外和不必要的障碍,创新车辆设计、功能和操作模式,并将开发以安全为重点的框架和工具来评估ADS技术的安全性能。
3. 准备运输系统-美国交通部将与利益相关者合作,开展安全评估和整合ADS所需的基础研究和示范活动,同时努力提高安全性、效率和交流运输系统的可行性。
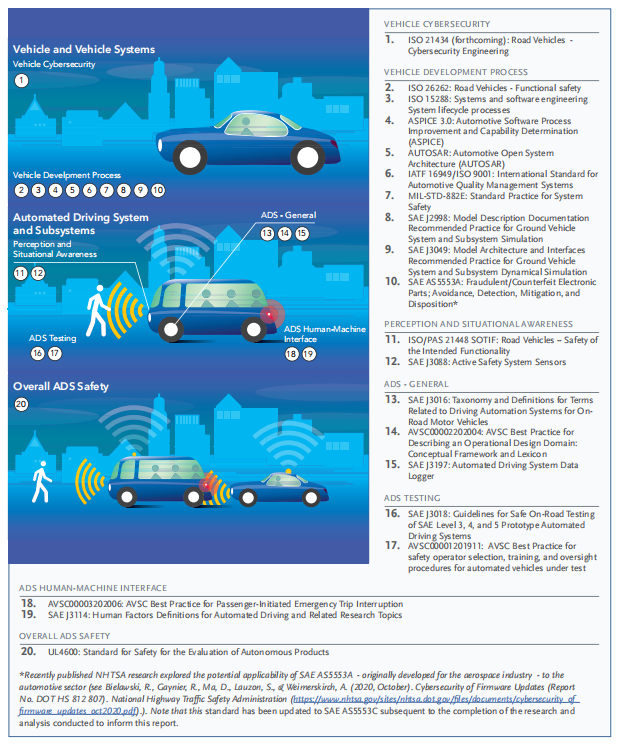
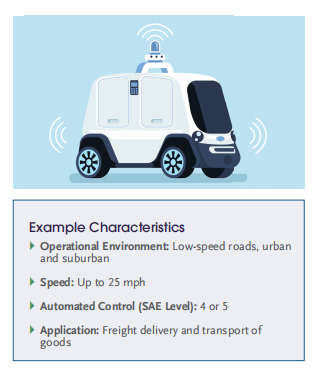
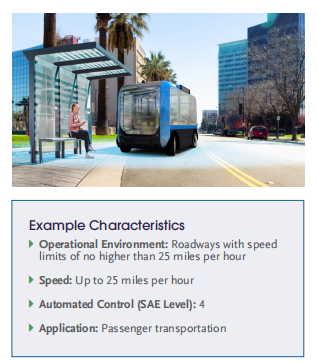
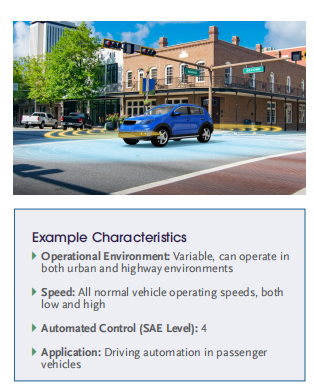
围绕这三大目标,制定了详细的解决措施。同时,对目前主流的自动驾驶车辆用例进行了定义。比如低速无人物流车、无人巴士、无人物流卡车、自动驾驶汽车、Robotaxi等。


AVCP指出,自动化卡车运输公司是如何开发4级ADS的,该ADS具有从出入口到出口或从匝道到匝道的有限访问高速公路的“运营设计域”。
该文件指出,联邦汽车运输安全管理局(FMCSA)计划与配备ADS的CMV开发人员,卡车制造商,汽车运输商,行业协会和其他团体举行一系列会议,以进一步制定基于行业的卡车标准,最终将无需驾驶员操作。DOT正在积极研究ADS对该国长途卡车运输劳动力的潜在影响。
这份综合计划是美国探索实现安全自动驾驶交通的思考,是一种具有战略性和灵活性的方法,也是他国发展安全自动驾驶交通系统的范本,同时,在赵小兰部长离职这一天发布,也是对赵小兰部长多年来美国交通发展的阶段性总结。
1月7日,美国交通部长赵小兰因特朗普的支持者闯进了国会大厦,使美国经历了一场“痛苦但却完全可以避免的事件”,随即发表声明宣布辞职,她表示,将于1月11日正式辞去交通部长职务,但她的团队将继续协助拜登任命的交通部长布蒂吉格(Pete Buttigieg),完成权力交接工作。这成为美国国会骚乱后首名辞职的特朗普政府内阁成员,也是所有当前辞职的美国官员中级别最高的。
不过,就在她离职前,美国交通运输部(DOT)刚刚发布了一份长达38页的《自动驾驶汽车综合计划》(AVCP),进一步指明了美国自动驾驶的发展方向,它是自动驾驶4.0的延申。
赵小兰在文件中表示,这份综合计划制定了美国DOT的多式联运战略,以促进合作和透明度,使监管环境更加现代化,为自动化车辆的安全集成准备运输系统。该计划说明了这部分工作如何超越政府,通过提供真实世界的例子来应对现代交通系统的挑战,业务管理部门是如何合作解决新兴技术应用的需要的。虽然没有人能预测未来,但重要的是通过建立为未来准备一种灵活的方法,优先考虑安全,并鼓励美国的独创性。
该计划以自动驾驶4.0(AV4.0)中所述的原则为基础,确定了实现这一愿景的三个目标或自动驾驶系统(ADS):
1.促进协作和透明度-美国数字技术公司将促进其合作伙伴和利益相关方,包括公众获得明确和可靠的信息, 关于ADS的能力和局限性。
2. 现代化的监管环境-美国DOT将现代化的监管,以消除意外和不必要的障碍,创新车辆设计、功能和操作模式,并将开发以安全为重点的框架和工具来评估ADS技术的安全性能。
3. 准备运输系统-美国交通部将与利益相关者合作,开展安全评估和整合ADS所需的基础研究和示范活动,同时努力提高安全性、效率和交流运输系统的可行性。
围绕这三大目标,制定了详细的解决措施。同时,对目前主流的自动驾驶车辆用例进行了定义。比如低速无人物流车、无人巴士、无人物流卡车、自动驾驶汽车、Robotaxi等。
AVCP指出,自动化卡车运输公司是如何开发4级ADS的,该ADS具有从出入口到出口或从匝道到匝道的有限访问高速公路的“运营设计域”。
该文件指出,联邦汽车运输安全管理局(FMCSA)计划与配备ADS的CMV开发人员,卡车制造商,汽车运输商,行业协会和其他团体举行一系列会议,以进一步制定基于行业的卡车标准,最终将无需驾驶员操作。DOT正在积极研究ADS对该国长途卡车运输劳动力的潜在影响。
这份综合计划是美国探索实现安全自动驾驶交通的思考,是一种具有战略性和灵活性的方法,也是他国发展安全自动驾驶交通系统的范本,同时,在赵小兰部长离职这一天发布,也是对赵小兰部长多年来美国交通发展的阶段性总结。



编辑推荐




最新资讯
-
东风马赫动力完成首个低空无人机项目地面大
2025-04-10 09:06
-
标准解读 | UNECE R116 与 GB 15740-2024
2025-04-10 09:04
-
汽车电子软件开发的三步测试
2025-04-10 08:59
-
动力电池循环寿命法规1号修改单内容详解
2025-04-10 08:56
-
如何有效防止动力电池热失控引发的灾难性后
2025-04-10 08:56
