




 广告
广告





















































车载毫米波雷达的虚拟测试仿真
2021-01-24 17:08:58· 来源:《电子设计工程》 作者:长安大学 电子与控制工程学院 秦 风 李登峰 王文威

引言智能汽车传感器的虚拟测试仿真是智能驾驶整车在环或硬件在环测试的重要一环。针对毫米波雷达的虚拟测试的需要,本文研究了传感器注入法与黑盒模拟法在毫米波
引言
智能汽车传感器的虚拟测试仿真是智能驾驶整车在环或硬件在环测试的重要一环。针对毫米波雷达的虚拟测试的需要,本文研究了传感器注入法与黑盒模拟法在毫米波雷达测试中的性能差异。
随着智能交通系统在全球的广泛应用。高级驾驶辅助系统(ADAS)作为无人驾驶技术的基础在全球范围得到快速发展。因此, 智能驾驶的虚拟测试仿真的重要性也就日 益突出,虚拟测试仿真通过模拟车辆状态,车载传感器,控制器,道路工况以及交通场景来对智能驾驶性能实现全面的评价。
在具备主动安全的 ADAS 系统中, 毫米波雷达是实现 ADAS 功能的重要传感器设备,在汽车探测、防撞预警、辅助变道以及自 适应巡航功能上发挥了重要的作用。
与其他传感器相比,毫米波雷达具备高精度、抗干扰、全天候工作等特性 。因此, 对毫米波雷达做虚拟测试仿真,比较虚拟毫米波传感器注入法与黑盒模拟法的性能,对智能驾驶虚拟测试具有重要的参考价值。
01 智能驾驶的车辆在环虚拟测试
智能驾驶的虚拟测试方法主要包括模型在环测试、硬件在环测试和车辆在环测试 。其中车辆在环测试是通过软件模拟传感器状态、车辆动态模型、控制器模型和综合交通环境,结合无人驾驶车辆在虚拟现实综合交通环境中的运行状态,实现智能驾驶车辆的全面、系统、客观的评价。
由于采用虚拟现实技术,各种复杂的综合交通环境可以在测试系统中复现,理论上可以模拟所有的综合交通环境,可以达到智能驾驶车辆完备性测试要求。 与真实交通测试方法相比,虚拟测试方法效率高、过程简单、时间短、费用低等优点 。 车辆在环虚拟测试原理图如图 1 所示。
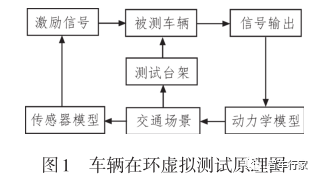
在图 1 的车辆在环虚拟测试原理图中, 被测车辆放置在测试台架上运行, 输出车速、加速、倒车、档位, 方向盘转角 、车身姿态等信息, 通过车辆动力学软件来配置出 与被测车辆参数一致的虚拟车辆, 虚拟车辆在虚拟交通环境中运行:
一方面通过车载虚拟传感器(摄像头, 毫米波雷达, 激光雷达, 车道线传感器等)感知周围交通环境, 把信息转换成无人车传感器信号, 注入到被测车辆控制器中;
另一方面将交通场景中虚拟被测车辆车身姿态的信息输出给测试台架, 实现道路状况的模拟, 这样台架上的被测真实车辆运行状态就能与虚拟车辆在交通场景中的运行状态保持一致。 在该系统中可以模拟无人车在交通道路中的各种场景, 验证无人车控制算法的可靠性,实现无人车整车在环测试或硬件在环测试 。
车辆在环虚拟测试重要的一环是传感器激励信号的注入, 因为它是把动态交通仿真环境中的信息转换成无人车传感器信号注入到无人车控制器中,以替代无人车中的实际传感器, 是实现整车在环模拟测试最关键的技术问题。
文中主要对传感器模型中的毫米波雷达传感器做虚拟测试, 比较传感器注入法与外部模拟法在虚拟测试中的性能差异, 分析其各自 的特点, 这直接影
响无人车整车在环虚拟仿真的可靠性与真实性。
02 虚拟测试基本原理与硬件设备
目前常用的激励信号注入方法有黑盒模拟法和传感器数据注入方法, 由于无人车传感器众多, 安装的方式和传感器性能千变万化, 黑盒模拟方法应用到无人车虚拟测试系统中面临极大的困难。 根据传感器的不同, 黑盒模拟法可分为摄像头黑盒模拟, 毫米波雷达黑盒模拟等。
2.1 传感器数据注入基本原理
传感器数据注入就是将软件中虚拟车载毫米波传感器所采集动态交通仿真环境信息转换后, 送给无人车的控制器, 以替代无人车中的实际传感器, 实现车辆虚拟测试仿真。
2.2 黑盒模拟法的基本原理
根据毫米波雷达探测的原理即:通过微波在空间反射时间的延迟判断距离, 通过反射波形的频移判断对象是在接近还是在远离。 所以在特制的毫米波雷达暗箱中, 同样可以通过高效、高速的硬件在微波传输的时间内。
利用软件实现对雷达发射波频谱的频移以及时间叠加, 从场景仿真软件上提取要在硬件上仿真的对象坐标, 通过回波模拟器将实际信号和场景实时互联, 然后发射到真实的雷达上, 让雷达误以为是一个真实目 标, 再将真实雷达的信号注入到无人车的控制器中, 实现整车硬件在环测试。
2.3 毫米波雷达暗箱及工作原理
黑盒模拟法需要毫米波雷达测试暗箱,本文后面所有的测试都需要该测试系统配合来实现。 测试系统示意图如图 2 所示, 整个系统包括暗箱、转台、计算机、毫米波雷达、NI车载雷达测试系统(Vehicle Radar Test System, VRTS), 其它附件。
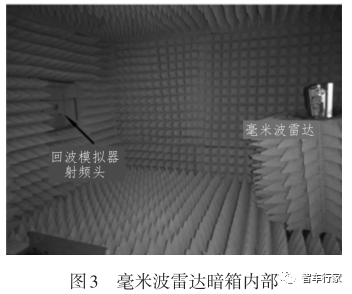
暗室: 内置安装德国大陆集团的 ARS408-21 77 GHz 长距离毫米波雷达和水平转台, 暗箱内壁及水平转台上均贴有锥形吸波材料; VRTS 的核心是 PXI 系统,包含了 PXIe-5840 矢量信号收发器( 矢量信号发生器、矢量信号分析仪、用户 可编程的 FPGA 和高速串行接口)和可变延迟发生器;以及回波模拟器 。
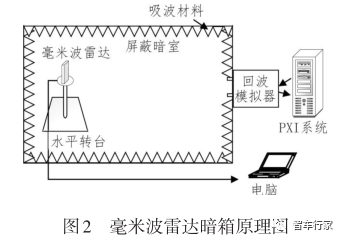
毫米波雷达测试暗箱的基本工作原理:将虚拟场景中的毫米波雷达传感器信息通过网络发送给VRST系统的上位机, 上位机将接收到的场景中虚拟毫米波信息进行处理, 计算出延迟时间、转台旋转角度、转台的旋转方向 和两个模型之间的模拟距离和角度; 被测毫米波雷达跟着转台转动并发出毫米波射频信号;
由回波模拟器接收并通过 矢量信号分析仪的分析得到其振幅、频率和周期;延时控制器根据延时时间控制毫米波信号发生器的工作时刻; 在工作时刻, 毫米波信号发生器生成与接收射频信号的振幅、频率和周期相同的发射信号, 通过回波模拟器发送到暗箱中由真实毫米波雷达接收 。


03 虚拟测试仿真
传感器数据注入法基本步骤:
1)在 prescan 软件中搭建虚拟交通场景:驾驶车辆(主车)和目 标车辆以及道路, 主车上搭载有虚拟的毫米波雷达 ;
2)将虚拟毫米波雷达采集的信息在 MATLAB 中解析, 绘制其纵向和横向信息 。
黑盒模拟法测试的步骤:
1)在 prescan 软件中搭建虚拟交通场景包含:驾驶车辆模型( 主车)和目 标车辆以及道路, 主车上搭载有虚拟的毫米波雷达;
2)通过局域网将毫米波雷达的信息发送给VRTS;
3) 读取 CAN 信号数据解析真实毫米波接收的信息。
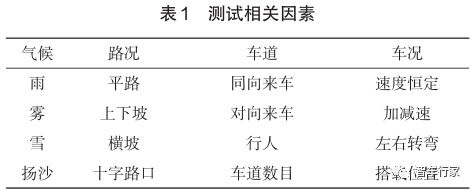
测试方案的制定需要考虑很多因素如气候、路况、 车道、 车况等等, 如表 1 所示 , 从用户实际使用以及未来无人车路试的角度出发, 在充分考虑各种测 试场景的基础上, 这里简单的给出了参考用例。
3.1 目标车辆匀速与加速测试仿真
测试方法如图 6 所示:两车在单行车道上相距60 m,前车(车辆 2)速度由 24 m/s匀加速至 27 m/s, 之后保持匀速, 主车(车辆 1)在自适应巡航模式下跟随前车。 由 于轨迹事先规划, 所以横向 信息变化不明显。
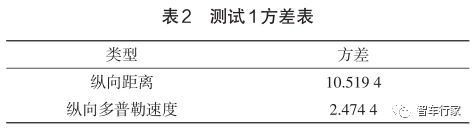
纵向距离对比与纵向 多普勒相对速度对比如图 7 和图 8 所示。 采用欧氏距离法来分析两条曲线的相似度,方差越小则表示相似度越高,如表2所示。
3.2 目标车辆转弯测试仿真
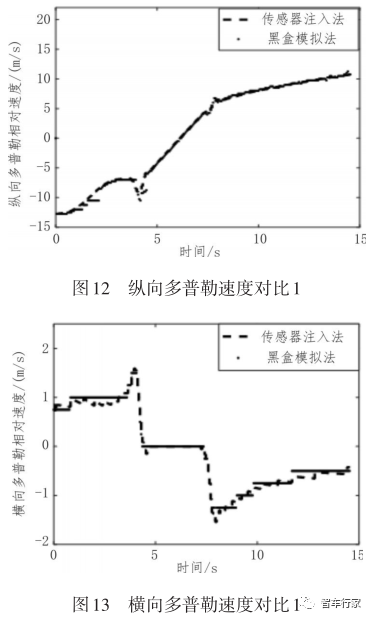
测试方法如图 9 所示:两辆车分别在相邻的车道上纵向相距 52 m, 目标车辆(车辆 2)先由 15 m/s变加速至 20 m/s, 整个加速过程 60 m, 之后保持匀速,接着左转弯至相邻车道匀速行驶, 50 m 后又转弯至右车道;
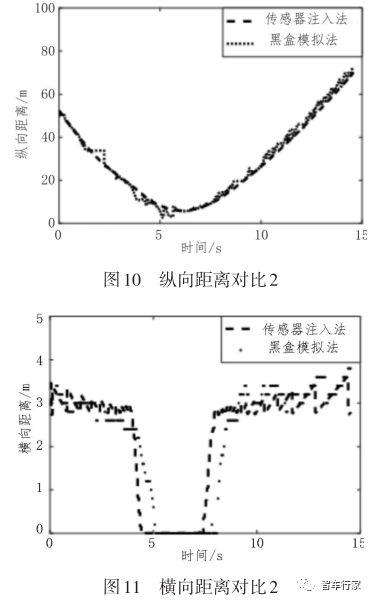
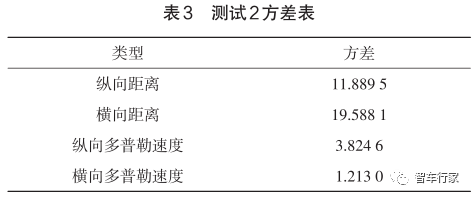
主车(车辆 1)在左车道上自 适应巡航模式下行驶。 两种方法的纵向与横向信息对比如图 10~14所示。 采用欧氏距离法来分析两条曲线的相似度,方差表如表 3 所示。
3.3 目标车辆上下坡测试仿真
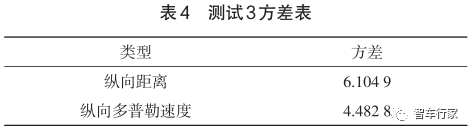
测试方法如图 14 所示, 两车纵向 相距 30 m, 均以匀速向 前行驶, 前车( 车辆 2)速度为 12 m/s, 主车(车辆 1)车速度为 10 m/s, 在距前车 70米处为上坡路段, 上坡路段如图中“》”所示, 下坡路段如“《”所示,由于轨迹事先规划, 所以横向信息变化很小, 这里不予给出。 两种方法的纵向对比如图 15~16所示。

采用欧氏距离法来分析两条曲线的相似度, 方差表如表 4所示。
3.4 目标弯道测试仿真
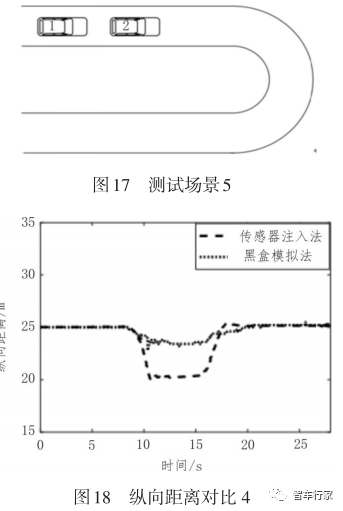
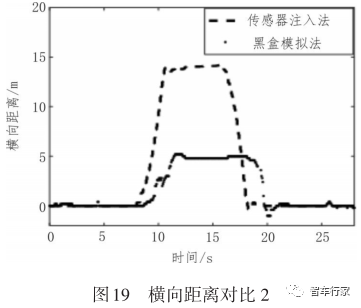
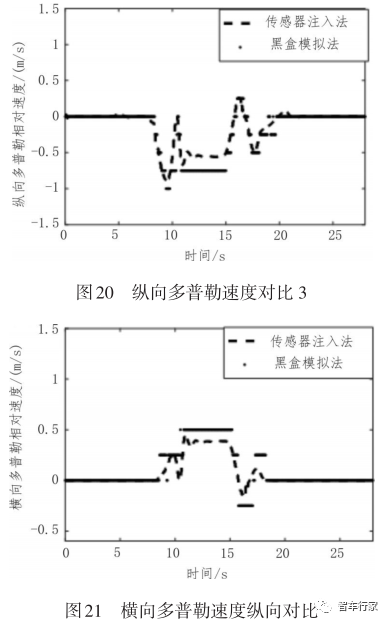
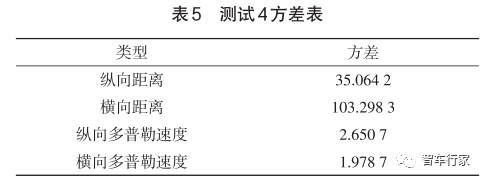
测试方法如图 14所示,两车在纵向上相距25 m,目标车辆(车辆 2)和主车(车辆 1)均以速度 12 m/s匀速行驶, 之后右转弯 180°, 弯道半径 30 m, 之后继续匀速行驶 。 两种方法的纵向与横向信息对比如图18~21 所示。
采用欧氏距离法来分析两条曲线的相似度, 方差表如表 5 所示。
04 测试结果综合对比分析
从上述的方差表 2~5 中数据中综合分析得 ,传感器注入法与黑盒模拟法。在纵向距离上, 无论主车还是在目 标车辆, 在匀速加速与转弯测试中性能基本一致, 方差很小;但在上下坡与弯道测试中方差明显过大, 这是由于暗箱的自身局限性与真实毫米波雷达性能所致, 具体原因在横向距离的比较上一并分析。
在横向距离上, 目 标车辆的转弯或者主车的转弯都可能导致黑盒模拟法信号的延迟以及误差明显偏大, 这一方面是由 转弯需要暗箱内部转台转动引起的延迟, 另 一方面也是暗箱的自 身局限性与真实毫米波雷达性能所致。
受暗箱尺寸的影响, 本测试所用的暗箱最大横向模拟角度约为±18°, 超过 18°的被测物体的模拟回 波会被暗箱内 壁的吸波材料吸收, 所以在图 18 和图 19 中可明显看到在 10 s 至 18 s时间内目 标车辆相对主车的横向角度超过 18°, 导致纵向距离与横向距离幅值偏差过大。
本文所采用的大陆毫米波雷达在检测到被测目标离开雷达的可检测边界后, 会继续输出 被测目 标离开边界时的当前值, 如在图 15 中, 目 标车辆由 于上坡从 8 s 至 11 s 从真实雷达界面中消失, 但是大陆雷达仍持续输出纵向距离 24 m。
在图 18 中同理, 目标车辆横向角度超过 18°后,理论上应检测不到物体,但大陆雷达在 10 s至 18 s仍持续输出;图 19、20、21 均类似。在纵向与横向多普勒速度对比上, 四次测试方差均不超为 5, 方差主要是由大陆雷达的多普勒速度的基数引起 , 大 陆 雷 达 的 多 普 勒 速 度 基 数 为0.25 m/s, 如图 20、21 中可看到略大的偏差。 但总体上传感器注入法与黑盒模拟法性能基本一致。
5 结 论
通过本文进行的 4 次不同工况下的车载毫米波雷达虚拟测试, 得出传感器注入法与黑盒模拟法在目标车辆匀速、加减速、转弯工况下, 纵向与横向性能基本一致, 这为毫米波雷达硬件在环测试仿真提供了重要的经验:
即在做目标车辆匀速、加减速转弯的雷达硬件在环测试可优先选择黑盒模拟法, 这样测试的真实性更得到保障。 但在上下坡与弯道测试中, 传感器注入法的优势更为明显, 它不受暗箱自身的局限性与雷达精度等物理因素的影响, 能够在较为苛刻的工况下来满足虚拟测试的需要, 性能与效果均优于黑盒模拟法。
智能汽车传感器的虚拟测试仿真是智能驾驶整车在环或硬件在环测试的重要一环。针对毫米波雷达的虚拟测试的需要,本文研究了传感器注入法与黑盒模拟法在毫米波雷达测试中的性能差异。
随着智能交通系统在全球的广泛应用。高级驾驶辅助系统(ADAS)作为无人驾驶技术的基础在全球范围得到快速发展。因此, 智能驾驶的虚拟测试仿真的重要性也就日 益突出,虚拟测试仿真通过模拟车辆状态,车载传感器,控制器,道路工况以及交通场景来对智能驾驶性能实现全面的评价。
在具备主动安全的 ADAS 系统中, 毫米波雷达是实现 ADAS 功能的重要传感器设备,在汽车探测、防撞预警、辅助变道以及自 适应巡航功能上发挥了重要的作用。
与其他传感器相比,毫米波雷达具备高精度、抗干扰、全天候工作等特性 。因此, 对毫米波雷达做虚拟测试仿真,比较虚拟毫米波传感器注入法与黑盒模拟法的性能,对智能驾驶虚拟测试具有重要的参考价值。
01 智能驾驶的车辆在环虚拟测试
智能驾驶的虚拟测试方法主要包括模型在环测试、硬件在环测试和车辆在环测试 。其中车辆在环测试是通过软件模拟传感器状态、车辆动态模型、控制器模型和综合交通环境,结合无人驾驶车辆在虚拟现实综合交通环境中的运行状态,实现智能驾驶车辆的全面、系统、客观的评价。
由于采用虚拟现实技术,各种复杂的综合交通环境可以在测试系统中复现,理论上可以模拟所有的综合交通环境,可以达到智能驾驶车辆完备性测试要求。 与真实交通测试方法相比,虚拟测试方法效率高、过程简单、时间短、费用低等优点 。 车辆在环虚拟测试原理图如图 1 所示。
在图 1 的车辆在环虚拟测试原理图中, 被测车辆放置在测试台架上运行, 输出车速、加速、倒车、档位, 方向盘转角 、车身姿态等信息, 通过车辆动力学软件来配置出 与被测车辆参数一致的虚拟车辆, 虚拟车辆在虚拟交通环境中运行:
一方面通过车载虚拟传感器(摄像头, 毫米波雷达, 激光雷达, 车道线传感器等)感知周围交通环境, 把信息转换成无人车传感器信号, 注入到被测车辆控制器中;
另一方面将交通场景中虚拟被测车辆车身姿态的信息输出给测试台架, 实现道路状况的模拟, 这样台架上的被测真实车辆运行状态就能与虚拟车辆在交通场景中的运行状态保持一致。 在该系统中可以模拟无人车在交通道路中的各种场景, 验证无人车控制算法的可靠性,实现无人车整车在环测试或硬件在环测试 。
车辆在环虚拟测试重要的一环是传感器激励信号的注入, 因为它是把动态交通仿真环境中的信息转换成无人车传感器信号注入到无人车控制器中,以替代无人车中的实际传感器, 是实现整车在环模拟测试最关键的技术问题。
文中主要对传感器模型中的毫米波雷达传感器做虚拟测试, 比较传感器注入法与外部模拟法在虚拟测试中的性能差异, 分析其各自 的特点, 这直接影
响无人车整车在环虚拟仿真的可靠性与真实性。
02 虚拟测试基本原理与硬件设备
目前常用的激励信号注入方法有黑盒模拟法和传感器数据注入方法, 由于无人车传感器众多, 安装的方式和传感器性能千变万化, 黑盒模拟方法应用到无人车虚拟测试系统中面临极大的困难。 根据传感器的不同, 黑盒模拟法可分为摄像头黑盒模拟, 毫米波雷达黑盒模拟等。
2.1 传感器数据注入基本原理
传感器数据注入就是将软件中虚拟车载毫米波传感器所采集动态交通仿真环境信息转换后, 送给无人车的控制器, 以替代无人车中的实际传感器, 实现车辆虚拟测试仿真。
2.2 黑盒模拟法的基本原理
根据毫米波雷达探测的原理即:通过微波在空间反射时间的延迟判断距离, 通过反射波形的频移判断对象是在接近还是在远离。 所以在特制的毫米波雷达暗箱中, 同样可以通过高效、高速的硬件在微波传输的时间内。
利用软件实现对雷达发射波频谱的频移以及时间叠加, 从场景仿真软件上提取要在硬件上仿真的对象坐标, 通过回波模拟器将实际信号和场景实时互联, 然后发射到真实的雷达上, 让雷达误以为是一个真实目 标, 再将真实雷达的信号注入到无人车的控制器中, 实现整车硬件在环测试。
2.3 毫米波雷达暗箱及工作原理
黑盒模拟法需要毫米波雷达测试暗箱,本文后面所有的测试都需要该测试系统配合来实现。 测试系统示意图如图 2 所示, 整个系统包括暗箱、转台、计算机、毫米波雷达、NI车载雷达测试系统(Vehicle Radar Test System, VRTS), 其它附件。
暗室: 内置安装德国大陆集团的 ARS408-21 77 GHz 长距离毫米波雷达和水平转台, 暗箱内壁及水平转台上均贴有锥形吸波材料; VRTS 的核心是 PXI 系统,包含了 PXIe-5840 矢量信号收发器( 矢量信号发生器、矢量信号分析仪、用户 可编程的 FPGA 和高速串行接口)和可变延迟发生器;以及回波模拟器 。
毫米波雷达测试暗箱的基本工作原理:将虚拟场景中的毫米波雷达传感器信息通过网络发送给VRST系统的上位机, 上位机将接收到的场景中虚拟毫米波信息进行处理, 计算出延迟时间、转台旋转角度、转台的旋转方向 和两个模型之间的模拟距离和角度; 被测毫米波雷达跟着转台转动并发出毫米波射频信号;
由回波模拟器接收并通过 矢量信号分析仪的分析得到其振幅、频率和周期;延时控制器根据延时时间控制毫米波信号发生器的工作时刻; 在工作时刻, 毫米波信号发生器生成与接收射频信号的振幅、频率和周期相同的发射信号, 通过回波模拟器发送到暗箱中由真实毫米波雷达接收 。
03 虚拟测试仿真
传感器数据注入法基本步骤:
1)在 prescan 软件中搭建虚拟交通场景:驾驶车辆(主车)和目 标车辆以及道路, 主车上搭载有虚拟的毫米波雷达 ;
2)将虚拟毫米波雷达采集的信息在 MATLAB 中解析, 绘制其纵向和横向信息 。
黑盒模拟法测试的步骤:
1)在 prescan 软件中搭建虚拟交通场景包含:驾驶车辆模型( 主车)和目 标车辆以及道路, 主车上搭载有虚拟的毫米波雷达;
2)通过局域网将毫米波雷达的信息发送给VRTS;
3) 读取 CAN 信号数据解析真实毫米波接收的信息。
测试方案的制定需要考虑很多因素如气候、路况、 车道、 车况等等, 如表 1 所示 , 从用户实际使用以及未来无人车路试的角度出发, 在充分考虑各种测 试场景的基础上, 这里简单的给出了参考用例。
3.1 目标车辆匀速与加速测试仿真
测试方法如图 6 所示:两车在单行车道上相距60 m,前车(车辆 2)速度由 24 m/s匀加速至 27 m/s, 之后保持匀速, 主车(车辆 1)在自适应巡航模式下跟随前车。 由 于轨迹事先规划, 所以横向 信息变化不明显。
纵向距离对比与纵向 多普勒相对速度对比如图 7 和图 8 所示。 采用欧氏距离法来分析两条曲线的相似度,方差越小则表示相似度越高,如表2所示。
3.2 目标车辆转弯测试仿真
测试方法如图 9 所示:两辆车分别在相邻的车道上纵向相距 52 m, 目标车辆(车辆 2)先由 15 m/s变加速至 20 m/s, 整个加速过程 60 m, 之后保持匀速,接着左转弯至相邻车道匀速行驶, 50 m 后又转弯至右车道;
主车(车辆 1)在左车道上自 适应巡航模式下行驶。 两种方法的纵向与横向信息对比如图 10~14所示。 采用欧氏距离法来分析两条曲线的相似度,方差表如表 3 所示。
3.3 目标车辆上下坡测试仿真
测试方法如图 14 所示, 两车纵向 相距 30 m, 均以匀速向 前行驶, 前车( 车辆 2)速度为 12 m/s, 主车(车辆 1)车速度为 10 m/s, 在距前车 70米处为上坡路段, 上坡路段如图中“》”所示, 下坡路段如“《”所示,由于轨迹事先规划, 所以横向信息变化很小, 这里不予给出。 两种方法的纵向对比如图 15~16所示。
采用欧氏距离法来分析两条曲线的相似度, 方差表如表 4所示。
3.4 目标弯道测试仿真
测试方法如图 14所示,两车在纵向上相距25 m,目标车辆(车辆 2)和主车(车辆 1)均以速度 12 m/s匀速行驶, 之后右转弯 180°, 弯道半径 30 m, 之后继续匀速行驶 。 两种方法的纵向与横向信息对比如图18~21 所示。
采用欧氏距离法来分析两条曲线的相似度, 方差表如表 5 所示。
04 测试结果综合对比分析
从上述的方差表 2~5 中数据中综合分析得 ,传感器注入法与黑盒模拟法。在纵向距离上, 无论主车还是在目 标车辆, 在匀速加速与转弯测试中性能基本一致, 方差很小;但在上下坡与弯道测试中方差明显过大, 这是由于暗箱的自身局限性与真实毫米波雷达性能所致, 具体原因在横向距离的比较上一并分析。
在横向距离上, 目 标车辆的转弯或者主车的转弯都可能导致黑盒模拟法信号的延迟以及误差明显偏大, 这一方面是由 转弯需要暗箱内部转台转动引起的延迟, 另 一方面也是暗箱的自 身局限性与真实毫米波雷达性能所致。
受暗箱尺寸的影响, 本测试所用的暗箱最大横向模拟角度约为±18°, 超过 18°的被测物体的模拟回 波会被暗箱内 壁的吸波材料吸收, 所以在图 18 和图 19 中可明显看到在 10 s 至 18 s时间内目 标车辆相对主车的横向角度超过 18°, 导致纵向距离与横向距离幅值偏差过大。
本文所采用的大陆毫米波雷达在检测到被测目标离开雷达的可检测边界后, 会继续输出 被测目 标离开边界时的当前值, 如在图 15 中, 目 标车辆由 于上坡从 8 s 至 11 s 从真实雷达界面中消失, 但是大陆雷达仍持续输出纵向距离 24 m。
在图 18 中同理, 目标车辆横向角度超过 18°后,理论上应检测不到物体,但大陆雷达在 10 s至 18 s仍持续输出;图 19、20、21 均类似。在纵向与横向多普勒速度对比上, 四次测试方差均不超为 5, 方差主要是由大陆雷达的多普勒速度的基数引起 , 大 陆 雷 达 的 多 普 勒 速 度 基 数 为0.25 m/s, 如图 20、21 中可看到略大的偏差。 但总体上传感器注入法与黑盒模拟法性能基本一致。
5 结 论
通过本文进行的 4 次不同工况下的车载毫米波雷达虚拟测试, 得出传感器注入法与黑盒模拟法在目标车辆匀速、加减速、转弯工况下, 纵向与横向性能基本一致, 这为毫米波雷达硬件在环测试仿真提供了重要的经验:
即在做目标车辆匀速、加减速转弯的雷达硬件在环测试可优先选择黑盒模拟法, 这样测试的真实性更得到保障。 但在上下坡与弯道测试中, 传感器注入法的优势更为明显, 它不受暗箱自身的局限性与雷达精度等物理因素的影响, 能够在较为苛刻的工况下来满足虚拟测试的需要, 性能与效果均优于黑盒模拟法。
- 下一篇:汽车碰撞过程中的断裂模拟技术
- 上一篇:乘用车座椅加热器测试介绍(一)







最新资讯
-
欧洲欲禁碳纤维
2025-04-16 15:47
-
模糊测试究竟在干什么
2025-04-16 15:23
-
越野车辆动力学 —— 越野车辆的平顺性
2025-04-16 14:50
-
Euro 7排放:欧盟委员会匆忙发布轻型车的实
2025-04-16 13:29
-
Applus+ IDIADA宣布采用全频谱碳纤维座舱用
2025-04-16 13:27
