




 广告
广告





















































汽车制动距离估算模型和安全车距控制算法
2021-01-25 16:17:41· 来源:奇瑞汽车股份有限公司智能车技术中心

针对智能车辆自动紧急制动和自主跟车时安全距离控制稳定较差的问题,提出了一种最小安全车距控制算法,基于汽车制动距离分段精确估算模型,针对车辆制动过程的不
针对智能车辆自动紧急制动和自主跟车时安全距离控制稳定较差的问题,提出了一种最小安全车距控制算法,基于汽车制动距离分段精确估算模型,针对车辆制动过程的不同阶段,采用不同的制动距离估算模型,准确计算制动距离。尤其是初始制动距离的精确估算,可以准确给出实施制动的最佳时机。再结合周期安全距离闭环控制算法,实现了最小安全车距的精准控制。该模型及算法已应用于奇瑞智能驾驶自动紧急制动和自主跟车系统中,经过5种初始车速,3 000次的实际工况试验,最小安全车距均保持在1.0~2.0 m内,控制精度<±0.5 m。结果表明:所提算法能够精确控制最小安全车距,尤其是针对前方静止目标的工况下,能够保证驾乘舒适性,同时有效提高车辆行驶安全性和道路行车效率。
近年来,随着交通环境的日益复杂,智能驾驶技术后续会逐步走入大众视野。自主避撞、自主跟车以及自主变道等功能,可以替代驾驶员完成大部分的驾驶任务[1-2]。但是在实际使用过程中,仍然面临很多问题,尤其是关于安全距离的精准控制方面,国内外专家学者对此进行了深入研究,也提出了一些安全距离模型[3-7]。车辆在制动过程中,车辆的状态不断变化。但是各模型均没有考虑这种变化,目标减速度设置不够精准,导致最小安全距离控制偏差较大,减速度过大,驾乘体验不好;减速度过小,安全风险较高,有追尾的风险。尤其是当前方目标为静止目标的场景下,如果安全距离控制偏差较大时,发生碰撞的可能性极高。
为了解决以上安全距离控制偏差较大、稳定性较差的问题,本文对车辆主动制动过程进行了深入分析,并给出了制动距离分段精确估算模型,同时结合最小安全车距闭环控制算法,提高最小安全车距控制精度。通过不断调节本车制动减速度,对安全距离进行周期性闭环控制,保证相对速度消除后,最小安全车距保持在一个恒定的范围内,避免过大或者过小,既提高了行车安全性,同时也保证了驾乘舒适性和行车效率。
1 制动过程分析及制动距离估算
一个典型的制动过程包括,初始制动、增加、保压和减压4个不同的过程。4个过程,减速度变化趋势不同,故需要采用不同的行驶距离估算模型才能够更精确地估算制动距离,从而更精准地设定目标减速度,实现更精确的最小安全距离控制。下面分析3种不同的制动过程,并给出相应的安全距离估算模型。
1.1 初始制动过程分析和制动距离估算模型
一次简单的线控初始制动过程分析见图1。
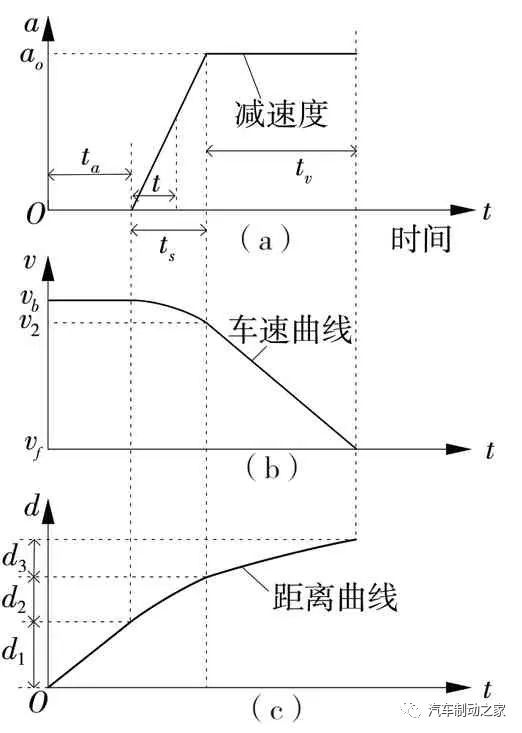
图1 初始制动过程分析
Fig.1 Initial braking process analysis
图1中:ta——线控制动系统接收到目标减速度到制动力开始增加所经历的时间及制动系统协调时间;d1——时间ta内本车所行驶的距离,这段时间内车速以初始速度行驶,故距离较长;a0——最大目标减速度,取负值;初始减速度为0;ts——制动减速度从开始增加到达到最大目标减速度所经历的时间或者制动力从开始增加到达到最大制动力所经历的时间;d2——ts时间内本车所行驶的距离;tv——制动减速度达到最大目标减速度后持续到本次制动结束所经历的时间;d2——tv时间内本车所行驶的距离;vb——车辆本次制动的初始速度;vf——车辆本次制动结束时的速度,动态跟车时,vf为前车车速。
图1的制动过程为车辆在行驶过程中的一次制动的过程分析即从未制动状态到达到设定目标减速度持续结束,结束时车辆可能进入非制动状态或者设定为新的更大的目标减速度。过程与图1类似。一次增压制动过程包括以下3个阶段:
(1)自由滑行阶段:时间内本车所行驶的距离可以表示为

(2)减速度上升阶段:ts时间内本车减速度处于上升阶段,假设经历时间t后的瞬时车速为vt,则有

由式(2)可得,ts时间内加速度可表示为

减速时, 为负值。ts时间内速度可表示为
为负值。ts时间内速度可表示为

ts时间内车辆行驶的距离可以表示为

车辆减速度开始增加时的车速近似等于初始车速vb,经过时间ts后,达到最大制动减速度a0后的瞬时车速记为v2,由式(4)得,v2可表示为

(3)减速度保持阶段:tv时间内本车以最大减速度a0持续实施制动,直到本次制动结束,同时车速由v2降低到vf,tv可表示为

tv时间内本车行驶的距离d3可表示为

一次线控初始制动过程所行驶的距离记为d,d可表示为

在正常的制动力增压,式(9)中最后一项可忽略,故式(9)可简化为

式(10)中的vb,vf可以通过整车CAN网络获得。响应时间ta,建压时间ts需要根据标定的数据进行估算。ta和ts可以根据初始减速度as和a0以及标定的最大制动力建压时间估算得到。
1.2 线控增压制动过程分析和距离估算模型
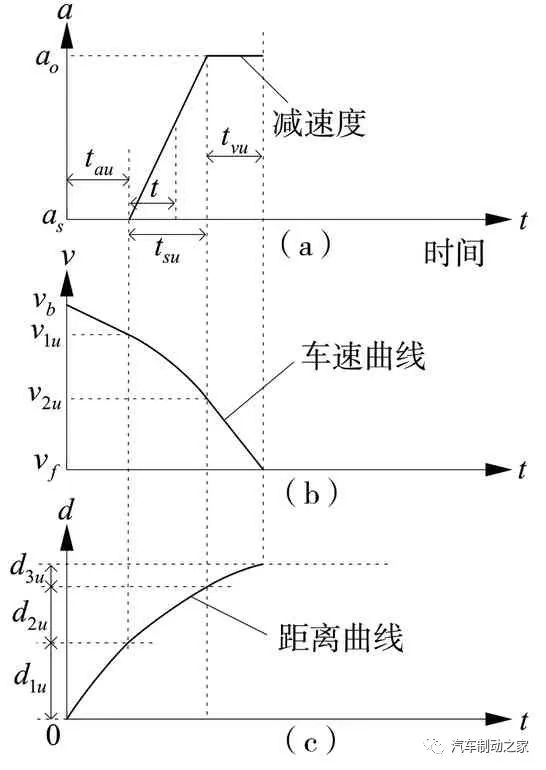
图2 增压制动过程分析
Fig.2 Compression brake process analysis
图2为线控增压制动过程分析。图2中:as——初始减速度;tau,d1u——线控制动系统从当前的初始减速度as接收到较大的目标减速度a0到制动力开始增加所经历的时间及制动系统协调时间和行驶的距离;tsu,d2u——制动减速度从as增加到达到最大目标减速度a0所经历的时间和行驶的距离。tvu,d3u——制动减速度达到最大目标减速度后持续到本次制动结束所经历的时间和行驶距离。
初始减速度保持阶段:tau时间内,本车以初始减速度as持续实施制动,直到减速度开始增加,同时车速由vb降低到v1u,tau可以通过标定确定,动态和静态压力调节响应时间不同。
v1u可以表示为

tau时间内,本车行驶的距离d1u可以表示为

减速度上升阶段:tsu时间内,本车减速度处于上升阶段,假设经历时间t后的瞬时车速为vtu,则

由式(13)可得,tsu时间内,加速度表示为

减速时, 为负值。tsu时间内,速度表示为
为负值。tsu时间内,速度表示为

tsu时间内,车辆行驶的距离d2u可以表示为
将式(14)代入式(16)得到

车辆减速度开始增加时的车速为v1u,经过时间tsu后,达到最大制动减速度a0后的瞬时车速记为v2u,由式(15)可得,可以表示为

将式(11)代入式(18)得到

目标减速度保持阶段:tvu时间内,本车以最大减速度a0持续实施制动,直到本次制动结束,同时车速由v2u降低到vf(即一次性完成制动,中间不进行周期性调节),tvu可以表示为

tvu时间内,本车行驶的距离d3u可表示为
在正常的制动力增压,式(21)中的最后3项可以忽略,故可以简化为

一次线控增压制动过程所行驶的距离记为du,则du可以表示为

正常的制动力增压,式(23)中的第2—4项、第9项、第10项可忽略。故式(23)可简化为

式(24)中的as可以通过整车CAN网络获得。响应时间tau,建压时间tsu需要根据标定的数据进行估算。tau和tsu可以根据初始减速度as和最大目标减速度a0以及标定的最大制动力建压时间估算得到。
1.3 线控减压制动过程分析和距离估算模型
图3为减压制动过程分析。
图3中:tal,d1l——线控制动系统从当前的初始减速度as接收到目标减速度a0到制动力开始减小所经历的时间及制动系统协调距离;tsl,d2l——制动减速度从as减小到目标减速度a0所经历的时间和行驶的距离;tvl,d3l——制动减速度减小到目标减速度后,持续到本次制动结束所经历的时间和行驶距离。
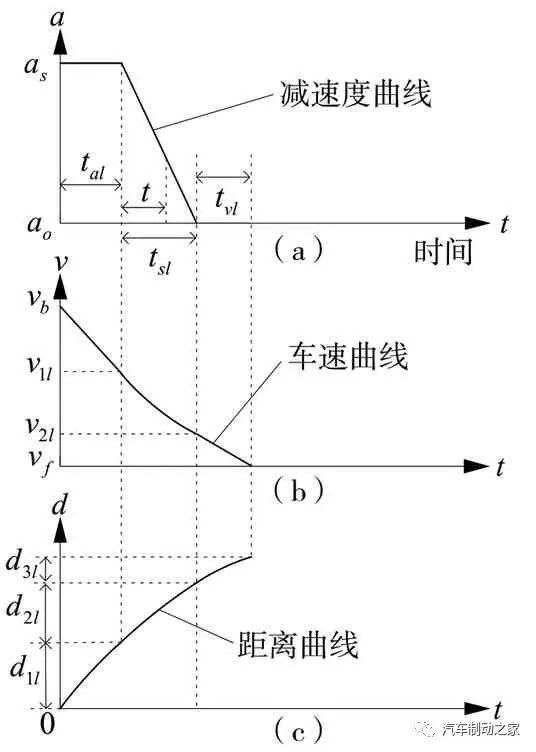
图3 减压制动过程分析
Fig.3 Decompression braking process analysis
初始减速度保持阶段:tal时间内,本车以初始减速度as持续实施制动,直到减速度开始减小,同时车速由vb降低到v1l,tal可通过标定确定,动态和静态压力调节响应时间不同。v1l可以表示为

tal时间内,本车行驶的距离d1l可表示为

减速度下降阶段:tsl时间内,本车减速度处于下降阶段,假设经历时间t后的瞬时车速为vtl,则

由式(27)可得,tsl时间内,加速度表示为

制动时, 为负值。tsl时间内,速度表示为
为负值。tsl时间内,速度表示为

tsl时间内,车辆行驶的距离d2l可表示为

将式(25)代入(30)得

车辆减速度开始减小时的车速为v1l,经过时间tsl后,达到最大制动减速度a0后的瞬时车速记为v2l,由式(29)得,v2l可表示为

将式(25)代入(32)得

目标减速度保持阶段:tvl时间内,本车以最大减速度a0持续实施制动,直到本次制动结束,同时车速由v2l降低到vf,tvl可表示为

tvl时间内,本车行驶的距离d3l可表示为
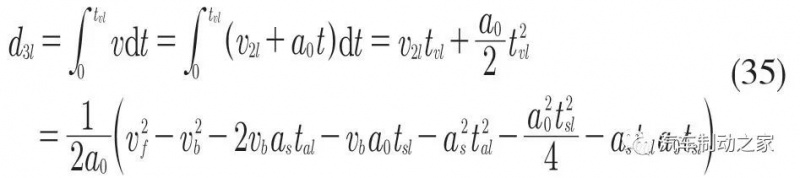
在正常的制动力增压,式(35)中的后3项可忽略。故式(35)可简化为

一次线控减压制动过程所行驶的距离记为dl,则dl可表示为
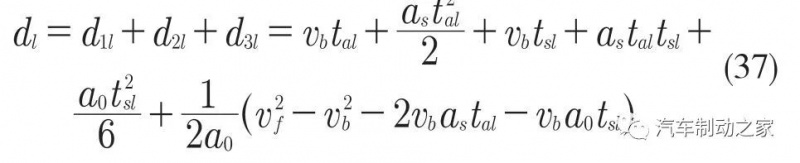
在正常的制动力增压,式(37)中的后3项可忽略。故式(37)可简化为

公式(38)中响应时间tal,减压时间tsl需要根据标定的数据进行估算。tal和tsl可以根据初始减速度as和目标减速度a0以及标定的最大制动力释放时间进行估算得到。
1.4 线控保压制动过程分析和距离估算模型
线控保压制动过程中,由于目标压力保持不变,故在控制周期内可近似认为制动减速度保持不变,as=a0,以vf为预瞄目标车速,行驶距离db估算公式如下

假设T为制动力调节周期,一般为50 ms。行驶距离db还可通过式(40)估计

式(39)、式(40)适于通过安全距离估计和闭环控制模型输出的目标减速度和前一周期不变的情况。
2 最小安全距离控制模型及算法
系统根据上层发送的制动控制指令和控制策略以及感知系统反馈的目标信息,进行最小安全距离控制。以前方目标的当前速度为预瞄速度,同时根据前方目标和本车的相对距离,结合前方目标的当前速度、本车车速以及当前路面附着系数进行目标减速度的设定,如果当前路面附着系数较低,则制动干预距离需要适当加长[11-13]。
假设环境感知系统反馈的前方目标的相对纵向距离为Dr,最小安全距离记为dmin。雷达最大检测距离和本车最大安全行车车速相关。制动干预距离则不仅与当前行车路面附着系数有关,而且与本车车速、前车车速以及制动系统的响应时间有关。当路面附着系数变化时,目标减速度需要加以约束。冰路面a0≤1.0 m/s2,雪路面a0≤3.5 m/s2,高附着路面a0≤9.0 m/s2。
2.1 线控初始制动最小安全距离控制模型
假设一次简单的线控初始制动最小安全距离控制误差记为e,e ≤0,则最小安全距离控制模型可以表示为

控制模型要求最小安全距离控制误差e快速收敛于0。如果e过大,则有可能发生追尾事故;如果e过小,则最小安全距离过大,道路行车效率大大降低。模型(41)通过实时采集的Dr,vb,vf,标定得到的ta,ts以及设定的dmin,设定a0,实施制动。该模型能够根据前方目标的速度实时估计行驶距离,设定新的目标减速度,通过周期闭环调节,实现最小安全距离的精确控制即最小安全距离控制误差e快速收敛于0。
2.2 线控增压制动最小安全距离控制模型
假设线控增压制动最小安全距离控制误差记为eu,eu≤0,则最小安全距离控制模型可表示

模型(42)通过实时采集的Dr,vb,vf,as标定得到的tau,tsu以及设定的dmin,设定a0,实施制动。周期闭环控制过程同上。
2.3 线控减压制动最小安全距离控制模型
假设线控减压制动最小安全距离控制误差记为el,el≤0,则最小安全距离控制模型可表示为

模型(43)通过实时采集的Dr,vb,vf,as标定得到的tal,tsl以及设定的dmin,设定a0,实施制动。周期闭环控制过程同上。
3 实车验证与结果分析
基于本文提出的基于双闭环的最小安全跟车距离控制算法,开发的智能自动跟车系统在前车静止和减速运行工况下进行了实际场景测试。兼顾行车安全和道路行车效率,在实际应用中,最小安全跟车距离dmin的理想值为1.00~2.00 m。当两车距离由远而近时,距离越近,相对车速越小,最小安全跟车距离控制更容易。
本系统通过视觉和雷达系统实时检测本车和前车的相对距离Dr并实时调整本车的目标制动减速度a0,保证了本车车速vb=0时,和前车的最小安全跟车距离dmin保持在1~2 m。为了确保测试的安全性,在测试时将式(44)—式(46)中的dmin值设定为6.00~7.00 m,测量的dmin值减去5.00 m作为实际控制的最小安全跟车距离,本车与前车的最小安全跟车距离采用激光测距仪进行实时测量跟踪。
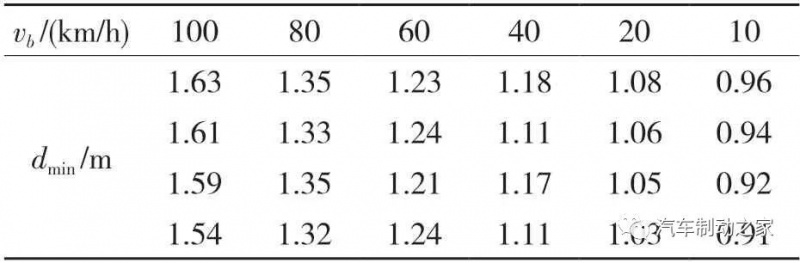
3.1 前车静止工况下测试与分析
在前车静止工况下,本自主跟车系统在多次接近前方静止车辆的过程中,记录了24次(每个初始车速测试4次)测试过程的最小安全跟车距离,测试数据见表1。从表1测试数据看,最小安全跟车距离控制精度高,具有很好的鲁棒性,不依赖于初始车速,最小安全跟车距离的控制不受初始车速的影响,克服了本车在不同车速下,最小安全跟车距离偏大或者偏小的问题。
表1 前车静止工况下最小安全跟车距离实测结果
Tab.1 Minimum safe follow-up distance measured results with front vehicle static
3.2 前车减速运行工况下测试分析
在前车减速运行工况下,本自主跟车系统在多次接近前方减速车辆的过程中,记录了24次(每对初始车速测试4次)测试过程的最小安全跟车距离的测试数据见表2。前车在减速运行工况下,由于采用了最小安全跟车距离的闭环控制,所以克服了安全距离估算时前车制动减速度无法预知所带来的问题。从表2的测试数据看,在本车和前方车辆均处于减速运行工况下,本车和前车相对速度小于等于0时,最小安全跟车距离均保持在1.00~2.00m范围内,表现出了较稳定的控制效果。克服了本车和前车不同初始车速下,最小安全跟车距离偏大或偏小的问题。
表2 前车运行工况下最小安全跟车距离实测结果
Tab.2 Minimum safe follow-up distance measured results with front vehicl running
另外,本文将主动制动系统和最小安全跟车距离闭环控制相结合,不仅保证了行车安全,提高了道路行车效率,同时也降低了制动系统控制的难度,车辆制动减速过程中,表现出了较好的平顺性和舒适性,具有很好的实用性。
4 结论
(1)本文对制动过程进行了分析,针对不同的周期制动过程,采用不同的估算模型可以精确估算制动周期内车辆的制动距离,从而根据与前车的相对距离,设定合理的目标制动减速度,提高了目标减速度的设置精度。
(2)不同阶段的制动距离估算模型,结合安全距离闭环控制算法,提高了安全距离和最小安全距离控制精度,克服了安全距离和最小安全距离控制偏差较大的问题。提高驾乘舒适性的同时,也提高了车辆行车安全性和道路行车效率。
近年来,随着交通环境的日益复杂,智能驾驶技术后续会逐步走入大众视野。自主避撞、自主跟车以及自主变道等功能,可以替代驾驶员完成大部分的驾驶任务[1-2]。但是在实际使用过程中,仍然面临很多问题,尤其是关于安全距离的精准控制方面,国内外专家学者对此进行了深入研究,也提出了一些安全距离模型[3-7]。车辆在制动过程中,车辆的状态不断变化。但是各模型均没有考虑这种变化,目标减速度设置不够精准,导致最小安全距离控制偏差较大,减速度过大,驾乘体验不好;减速度过小,安全风险较高,有追尾的风险。尤其是当前方目标为静止目标的场景下,如果安全距离控制偏差较大时,发生碰撞的可能性极高。
为了解决以上安全距离控制偏差较大、稳定性较差的问题,本文对车辆主动制动过程进行了深入分析,并给出了制动距离分段精确估算模型,同时结合最小安全车距闭环控制算法,提高最小安全车距控制精度。通过不断调节本车制动减速度,对安全距离进行周期性闭环控制,保证相对速度消除后,最小安全车距保持在一个恒定的范围内,避免过大或者过小,既提高了行车安全性,同时也保证了驾乘舒适性和行车效率。
1 制动过程分析及制动距离估算
一个典型的制动过程包括,初始制动、增加、保压和减压4个不同的过程。4个过程,减速度变化趋势不同,故需要采用不同的行驶距离估算模型才能够更精确地估算制动距离,从而更精准地设定目标减速度,实现更精确的最小安全距离控制。下面分析3种不同的制动过程,并给出相应的安全距离估算模型。
1.1 初始制动过程分析和制动距离估算模型
一次简单的线控初始制动过程分析见图1。
图1 初始制动过程分析
Fig.1 Initial braking process analysis
图1中:ta——线控制动系统接收到目标减速度到制动力开始增加所经历的时间及制动系统协调时间;d1——时间ta内本车所行驶的距离,这段时间内车速以初始速度行驶,故距离较长;a0——最大目标减速度,取负值;初始减速度为0;ts——制动减速度从开始增加到达到最大目标减速度所经历的时间或者制动力从开始增加到达到最大制动力所经历的时间;d2——ts时间内本车所行驶的距离;tv——制动减速度达到最大目标减速度后持续到本次制动结束所经历的时间;d2——tv时间内本车所行驶的距离;vb——车辆本次制动的初始速度;vf——车辆本次制动结束时的速度,动态跟车时,vf为前车车速。
图1的制动过程为车辆在行驶过程中的一次制动的过程分析即从未制动状态到达到设定目标减速度持续结束,结束时车辆可能进入非制动状态或者设定为新的更大的目标减速度。过程与图1类似。一次增压制动过程包括以下3个阶段:
(1)自由滑行阶段:时间内本车所行驶的距离可以表示为
(2)减速度上升阶段:ts时间内本车减速度处于上升阶段,假设经历时间t后的瞬时车速为vt,则有
由式(2)可得,ts时间内加速度可表示为
减速时,
ts时间内车辆行驶的距离可以表示为
车辆减速度开始增加时的车速近似等于初始车速vb,经过时间ts后,达到最大制动减速度a0后的瞬时车速记为v2,由式(4)得,v2可表示为
(3)减速度保持阶段:tv时间内本车以最大减速度a0持续实施制动,直到本次制动结束,同时车速由v2降低到vf,tv可表示为
tv时间内本车行驶的距离d3可表示为
一次线控初始制动过程所行驶的距离记为d,d可表示为
在正常的制动力增压,式(9)中最后一项可忽略,故式(9)可简化为
式(10)中的vb,vf可以通过整车CAN网络获得。响应时间ta,建压时间ts需要根据标定的数据进行估算。ta和ts可以根据初始减速度as和a0以及标定的最大制动力建压时间估算得到。
1.2 线控增压制动过程分析和距离估算模型
图2 增压制动过程分析
Fig.2 Compression brake process analysis
图2为线控增压制动过程分析。图2中:as——初始减速度;tau,d1u——线控制动系统从当前的初始减速度as接收到较大的目标减速度a0到制动力开始增加所经历的时间及制动系统协调时间和行驶的距离;tsu,d2u——制动减速度从as增加到达到最大目标减速度a0所经历的时间和行驶的距离。tvu,d3u——制动减速度达到最大目标减速度后持续到本次制动结束所经历的时间和行驶距离。
初始减速度保持阶段:tau时间内,本车以初始减速度as持续实施制动,直到减速度开始增加,同时车速由vb降低到v1u,tau可以通过标定确定,动态和静态压力调节响应时间不同。
v1u可以表示为
tau时间内,本车行驶的距离d1u可以表示为
减速度上升阶段:tsu时间内,本车减速度处于上升阶段,假设经历时间t后的瞬时车速为vtu,则
由式(13)可得,tsu时间内,加速度表示为
减速时,
为负值。tsu时间内,速度表示为tsu时间内,车辆行驶的距离d2u可以表示为
将式(14)代入式(16)得到
车辆减速度开始增加时的车速为v1u,经过时间tsu后,达到最大制动减速度a0后的瞬时车速记为v2u,由式(15)可得,可以表示为
将式(11)代入式(18)得到
目标减速度保持阶段:tvu时间内,本车以最大减速度a0持续实施制动,直到本次制动结束,同时车速由v2u降低到vf(即一次性完成制动,中间不进行周期性调节),tvu可以表示为
tvu时间内,本车行驶的距离d3u可表示为
在正常的制动力增压,式(21)中的最后3项可以忽略,故可以简化为
一次线控增压制动过程所行驶的距离记为du,则du可以表示为
正常的制动力增压,式(23)中的第2—4项、第9项、第10项可忽略。故式(23)可简化为
式(24)中的as可以通过整车CAN网络获得。响应时间tau,建压时间tsu需要根据标定的数据进行估算。tau和tsu可以根据初始减速度as和最大目标减速度a0以及标定的最大制动力建压时间估算得到。
1.3 线控减压制动过程分析和距离估算模型
图3为减压制动过程分析。
图3中:tal,d1l——线控制动系统从当前的初始减速度as接收到目标减速度a0到制动力开始减小所经历的时间及制动系统协调距离;tsl,d2l——制动减速度从as减小到目标减速度a0所经历的时间和行驶的距离;tvl,d3l——制动减速度减小到目标减速度后,持续到本次制动结束所经历的时间和行驶距离。
图3 减压制动过程分析
Fig.3 Decompression braking process analysis
初始减速度保持阶段:tal时间内,本车以初始减速度as持续实施制动,直到减速度开始减小,同时车速由vb降低到v1l,tal可通过标定确定,动态和静态压力调节响应时间不同。v1l可以表示为
tal时间内,本车行驶的距离d1l可表示为
减速度下降阶段:tsl时间内,本车减速度处于下降阶段,假设经历时间t后的瞬时车速为vtl,则
由式(27)可得,tsl时间内,加速度表示为
制动时,
为负值。tsl时间内,速度表示为tsl时间内,车辆行驶的距离d2l可表示为
将式(25)代入(30)得
车辆减速度开始减小时的车速为v1l,经过时间tsl后,达到最大制动减速度a0后的瞬时车速记为v2l,由式(29)得,v2l可表示为
将式(25)代入(32)得
目标减速度保持阶段:tvl时间内,本车以最大减速度a0持续实施制动,直到本次制动结束,同时车速由v2l降低到vf,tvl可表示为
tvl时间内,本车行驶的距离d3l可表示为
在正常的制动力增压,式(35)中的后3项可忽略。故式(35)可简化为
一次线控减压制动过程所行驶的距离记为dl,则dl可表示为
在正常的制动力增压,式(37)中的后3项可忽略。故式(37)可简化为
公式(38)中响应时间tal,减压时间tsl需要根据标定的数据进行估算。tal和tsl可以根据初始减速度as和目标减速度a0以及标定的最大制动力释放时间进行估算得到。
1.4 线控保压制动过程分析和距离估算模型
线控保压制动过程中,由于目标压力保持不变,故在控制周期内可近似认为制动减速度保持不变,as=a0,以vf为预瞄目标车速,行驶距离db估算公式如下
假设T为制动力调节周期,一般为50 ms。行驶距离db还可通过式(40)估计
式(39)、式(40)适于通过安全距离估计和闭环控制模型输出的目标减速度和前一周期不变的情况。
2 最小安全距离控制模型及算法
系统根据上层发送的制动控制指令和控制策略以及感知系统反馈的目标信息,进行最小安全距离控制。以前方目标的当前速度为预瞄速度,同时根据前方目标和本车的相对距离,结合前方目标的当前速度、本车车速以及当前路面附着系数进行目标减速度的设定,如果当前路面附着系数较低,则制动干预距离需要适当加长[11-13]。
假设环境感知系统反馈的前方目标的相对纵向距离为Dr,最小安全距离记为dmin。雷达最大检测距离和本车最大安全行车车速相关。制动干预距离则不仅与当前行车路面附着系数有关,而且与本车车速、前车车速以及制动系统的响应时间有关。当路面附着系数变化时,目标减速度需要加以约束。冰路面a0≤1.0 m/s2,雪路面a0≤3.5 m/s2,高附着路面a0≤9.0 m/s2。
2.1 线控初始制动最小安全距离控制模型
假设一次简单的线控初始制动最小安全距离控制误差记为e,e ≤0,则最小安全距离控制模型可以表示为
控制模型要求最小安全距离控制误差e快速收敛于0。如果e过大,则有可能发生追尾事故;如果e过小,则最小安全距离过大,道路行车效率大大降低。模型(41)通过实时采集的Dr,vb,vf,标定得到的ta,ts以及设定的dmin,设定a0,实施制动。该模型能够根据前方目标的速度实时估计行驶距离,设定新的目标减速度,通过周期闭环调节,实现最小安全距离的精确控制即最小安全距离控制误差e快速收敛于0。
2.2 线控增压制动最小安全距离控制模型
假设线控增压制动最小安全距离控制误差记为eu,eu≤0,则最小安全距离控制模型可表示
模型(42)通过实时采集的Dr,vb,vf,as标定得到的tau,tsu以及设定的dmin,设定a0,实施制动。周期闭环控制过程同上。
2.3 线控减压制动最小安全距离控制模型
假设线控减压制动最小安全距离控制误差记为el,el≤0,则最小安全距离控制模型可表示为
模型(43)通过实时采集的Dr,vb,vf,as标定得到的tal,tsl以及设定的dmin,设定a0,实施制动。周期闭环控制过程同上。
3 实车验证与结果分析
基于本文提出的基于双闭环的最小安全跟车距离控制算法,开发的智能自动跟车系统在前车静止和减速运行工况下进行了实际场景测试。兼顾行车安全和道路行车效率,在实际应用中,最小安全跟车距离dmin的理想值为1.00~2.00 m。当两车距离由远而近时,距离越近,相对车速越小,最小安全跟车距离控制更容易。
本系统通过视觉和雷达系统实时检测本车和前车的相对距离Dr并实时调整本车的目标制动减速度a0,保证了本车车速vb=0时,和前车的最小安全跟车距离dmin保持在1~2 m。为了确保测试的安全性,在测试时将式(44)—式(46)中的dmin值设定为6.00~7.00 m,测量的dmin值减去5.00 m作为实际控制的最小安全跟车距离,本车与前车的最小安全跟车距离采用激光测距仪进行实时测量跟踪。
3.1 前车静止工况下测试与分析
在前车静止工况下,本自主跟车系统在多次接近前方静止车辆的过程中,记录了24次(每个初始车速测试4次)测试过程的最小安全跟车距离,测试数据见表1。从表1测试数据看,最小安全跟车距离控制精度高,具有很好的鲁棒性,不依赖于初始车速,最小安全跟车距离的控制不受初始车速的影响,克服了本车在不同车速下,最小安全跟车距离偏大或者偏小的问题。
表1 前车静止工况下最小安全跟车距离实测结果
Tab.1 Minimum safe follow-up distance measured results with front vehicle static
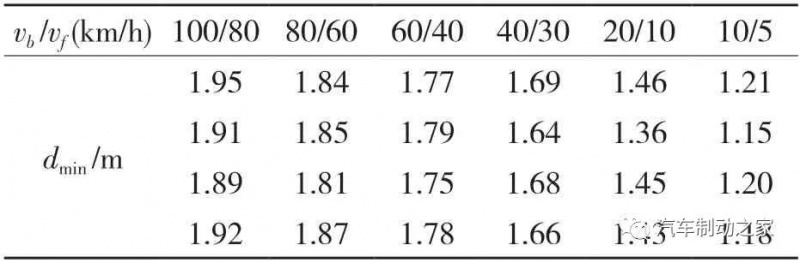
3.2 前车减速运行工况下测试分析
在前车减速运行工况下,本自主跟车系统在多次接近前方减速车辆的过程中,记录了24次(每对初始车速测试4次)测试过程的最小安全跟车距离的测试数据见表2。前车在减速运行工况下,由于采用了最小安全跟车距离的闭环控制,所以克服了安全距离估算时前车制动减速度无法预知所带来的问题。从表2的测试数据看,在本车和前方车辆均处于减速运行工况下,本车和前车相对速度小于等于0时,最小安全跟车距离均保持在1.00~2.00m范围内,表现出了较稳定的控制效果。克服了本车和前车不同初始车速下,最小安全跟车距离偏大或偏小的问题。
表2 前车运行工况下最小安全跟车距离实测结果
Tab.2 Minimum safe follow-up distance measured results with front vehicl running
另外,本文将主动制动系统和最小安全跟车距离闭环控制相结合,不仅保证了行车安全,提高了道路行车效率,同时也降低了制动系统控制的难度,车辆制动减速过程中,表现出了较好的平顺性和舒适性,具有很好的实用性。
4 结论
(1)本文对制动过程进行了分析,针对不同的周期制动过程,采用不同的估算模型可以精确估算制动周期内车辆的制动距离,从而根据与前车的相对距离,设定合理的目标制动减速度,提高了目标减速度的设置精度。
(2)不同阶段的制动距离估算模型,结合安全距离闭环控制算法,提高了安全距离和最小安全距离控制精度,克服了安全距离和最小安全距离控制偏差较大的问题。提高驾乘舒适性的同时,也提高了车辆行车安全性和道路行车效率。



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
