




 广告
广告





















































UXR的mmW选件成功完成加特兰公司汽车毫米波雷达测试
2021-01-28 00:42:04· 来源:是德科技KEYSIGHT 作者:是德科技中国有限公司 王创业 黄腾 加特兰微电子科技(上海)有限公司 何天琪

一 引言下一代智能汽车的自动驾驶的真正实现离不开对相关道路和交通流量参与的所有对象的信息的全面掌握。真正的无人驾驶不仅需要对道路环境的实时测,还需要强
一 引言
下一代智能汽车的自动驾驶的真正实现离不开对相关道路和交通流量参与的所有对象的信息的全面掌握。真正的无人驾驶不仅需要对道路环境的实时测,还需要强大的车载计算能力。所以未来的无人驾驶汽车会采用各种传感器,毫米波雷达、摄像头、激光雷达、超声波雷达,同时采用视觉传感器的融合技术和冗余技术实现对道路环境实时、可靠的探测。作为传感器的毫米波雷达,由于其特有的优势,全天候、探测距离远,是车载传感器中必不可少的。

随着毫米雷达技术的发展,特别是大带宽、高频率、高精度的雷达产品出现,对技术研发和产品本身性能指标的测试提出了很高的要求。相对而言采用数字视觉传感器的方法,在传统的3C行业已经应用成熟,目前在汽车行业应用主要是提高可靠性和稳定性并进行充分验证和测试,技术实现基本没有难点。而频域的方法,则相对是全新的技术在全新领域要实现突破并产品化,因此还处于技术探索和创新阶段,考虑到汽车自动驾驶的0失误率的要求,因而无论如何认真都是不过分的。
二 新一代汽车毫米波雷达的技术趋势和挑战
随着无人驾驶对毫米波雷达的要求,雷达技术的发展趋势是调制带宽更宽、调制波形更复杂、调制精度更高、收发通道数更多。技术背后的主要驱动因素分析如下:
1. 调制带宽更宽
在中远距离探测范围即60m以外,雷达的探测精度在1米左右,在中近距离探测范围内即60m以内,雷达的探测精度最高需要在0.1m以内。从最初的24GHz,76GHz雷达,到目前的79GHz雷达,雷达的工作带宽已经到2GHz,甚至未来会更宽。
更高的分析带宽对传统的分析仪器无论是时域还是频域均带来了极大的挑战。传统的时域方法主要是对信号进行下变频处理再采用实时示波器进行分析,但是下变频器的带宽及频响特性和噪声带来的测量误差是不可忽略的问题。而频谱仪的分析带宽和成本则一直是影响投资决策的巨大障碍。
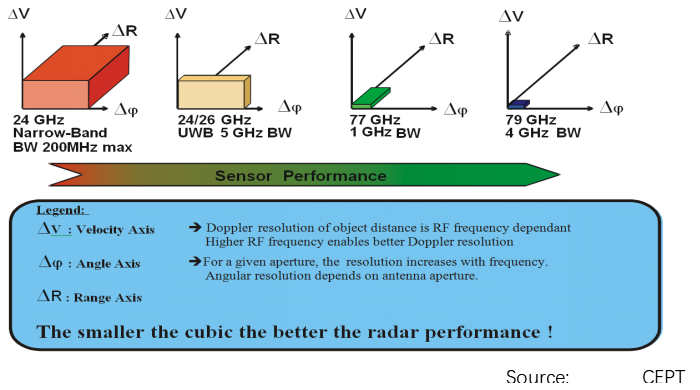
图1 毫米波雷达带宽与分辨率的关系
2. 调制波形更复杂
传统的毫米波雷达有单帧的FMCW,或者双帧的FMCW,如图1所示为双帧调制的雷达信号。考虑到毫米波雷达的普及性和安全性,未来的雷达需要频率跳变来避免其它信号对雷达的干扰,甚至雷达会有简单的通信功能。这些技术都会使得雷达的信号越来越复杂,对于测试提出的很高的要求。需要从时域、频域、解调域,全方位的对雷达信号做解调分析。
3. 调制精度更高
当前的汽车毫米波雷达主要还是利用FMCW来实现对目标距离和速度的探测,所以发射信号本身的调制精度就非常关键。发射端的调制精度越高,雷达本身的误差就越小,探测精度就越高。目前国内毫米波雷达芯片在3.5GHz调制带宽内可以实现0.027%的调制线性度(FM INL)。这个测试不需要变频,直接在79GHz频率进行采样测试,所以测试系统的误差非常小。
过去业界传统的测试方法,都是利用下变频器对79GHz的雷达信号进行下变频,用示波器对中频信号进行采样分析。这个过程会引入下变频器和测试设备自身的误差,如带内频响误差、相位附加噪声等,这些都会影响对雷达信号分析的精度。
4. 收发通道数更多
雷达不仅需要水平角度的探测,还需要垂直角度的探测。同时对雷达角度探测的精度也会提出更高的要求。下图是4发12收的雷达天线,在实现对MIMO雷达信号处理时,要求雷达芯片通道音的幅度精度在1dB以内,相位精度在3°以内。
传统的频谱仪的有限的通道数,在针对今天的车用MIMO雷达测试明显已经不能胜任,而时域仪器——示波器的通道数向来是一大优势。因此针对毫米波MIMO雷达的测试,实时示波器必将成为未来不可忽略的玩家。
三 是德科技基于UXR系列实时示波器的mmW测试方案
针对当前,越来越多的超宽带信号应用尤其是汽车毫米波雷达的蓬勃兴起,是德科技作为业界唯一同时精通频域和时域两大领域的测量测试产品和解决方案公司,推出基于UXR系列示波器的毫米波信号分析仪系统——UXR0051AP,推翻了传统示波器用于射频信号分析的三座大山:
性能不足——UXR 10bit ADC@256GSa/s;速度太慢——UXR内置硬件DDC;示波器太贵——提供基础带宽5GHz,采用滑动窗分析高频载波信号。
UXR0051AP采用1mm信号输入端口(即模拟信号路径带宽最高达110GHz),采样率256G Sa/s,标配1通道(配置N2166A选件可后升级扩展成2通道),实际是采用UXR高频段产品的硬件进行带宽限制以支持超宽带毫米波应用。从而成功将时域的实时示波器导入频域分析,打破传统的时域数字测量行业的“内卷化”。
针对汽车毫米波雷达的测试应用,在UXR示波器上配置VSA 89601C调制解调软件,即可基于256GSa/s采样率的示波器直接对79GHz的雷达信号进行采样,避免下变频对宽频信号的幅度精度影响,同时最多4通道的实时采集测试,可以满足MIMO雷达对通道间幅度和相位测试的要求。

图2 UXR0051AP毫米波信号分析仪系统
如下典型配置提供了最高达82GHz的超宽带信号分析能力,完全覆盖汽车毫米波雷达应用:

表1 UXR0051AP毫米波信号分析仪
在配置N2166A选件升级扩展成2通道后,可以对I/Q信号同时进行分析。如果需要对更多通路信号同时进行测试分析,则可以选择UXR0254AP型号,25GHz带宽,4通道256GSa/s,硬件10bit ADC采样。4通道25GHz带宽不仅可以满足MIMO雷达对通道间幅度和相位测试的要求,对其它高速数字Serdes标准的研发和验证测试也提供了强大的支持。
这一系统具有如下能力和特点:
■ 256GSa/s实时采样,直接对82GHz以内的信号进行采样避免下变频引入的误差;
■ 最多支持四通道同步测试,通道相位精度小于0.5度(RMS);
■ 分析带宽支持10GHz,5GHz两种选项;
■ 强大的VSA矢量信号分析功能,支持各种复杂的雷达调制信号;
■ 可选带宽为2.16GHz 的DDC功能,快速进行频谱功能和调制解调测试。
四 针对实际雷达产品的实测案例
1. Dephi ESR2.5雷达
下图是Dephi ESR2.5雷达双帧雷达信号分析。ESR2.5有中距离和远距离两种探测范围,硬件有两组天线,两个发射通道。传统的频谱仪是很难测试两个通道内的不同功率。利用VSA软件的触发同步功能,可以分别选择不同带宽信号的同步,分别测试两个发射通道的发射功率。
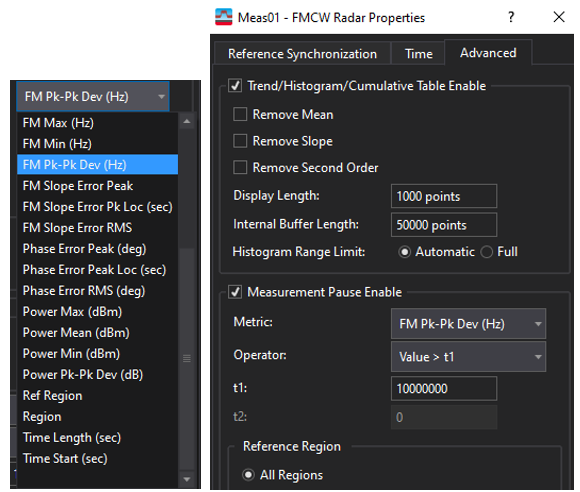
图3 VSA软件中FMCW不同雷达参数同步设置
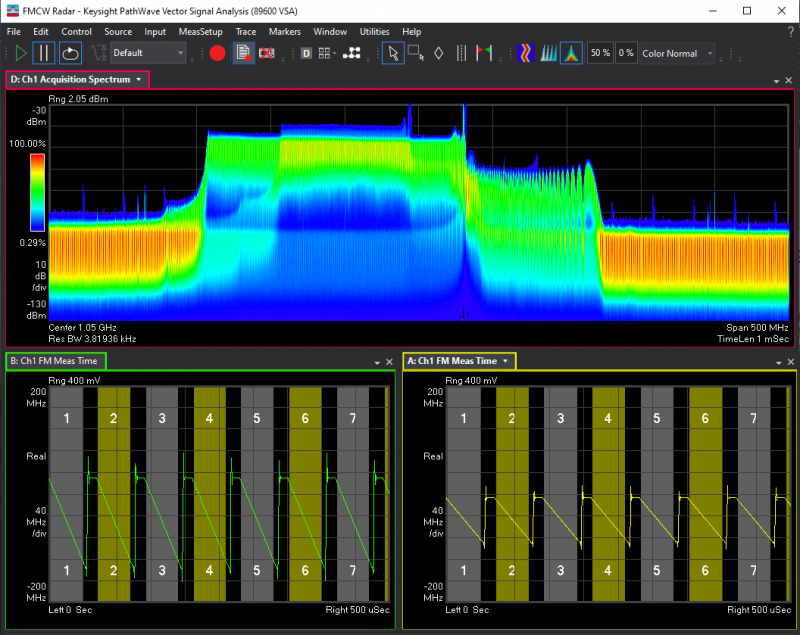
图4 VSA软件触发同步用于测试FMCW雷达信号
2. 基于UXR的mmW选件和VSA 89601C测试方案,对加特兰公司CAL77S244-AE芯片进行实测验证。
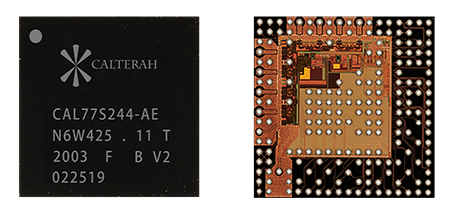
图5 加特兰毫米波雷达芯片
Alps 4T4R 77/79GHz Radar SoC (CAL77S244-AE)的主要特点如下:
■ 汽车级全集成毫米波雷达SoC
■ 发射通道:4,集成移相器
■ 接收通道:4,集成功率饱和检测器
■ 工作频率:76~81GHz,最大支持5G扫频带宽
■ FMCW波形生成器:用户自定义,支持自动增益控制、帧交错等功能
■ 高速ADC:采样率高达50MSPS,同时支持降采样功能
■ 雷达信号处理基带:硬件电路实现完整雷达信号处理
■ CPU:300MHz ARC® EM6
■ 片内存储空间:2.625MB RAM
■ 支持SoC级联功能
■ 外设接口:CAN/CAN-FD/SPI/QSPI/UART/I²C/LVDS/ GPIOs
■ AEC-Q100规范:Grade2
■ 功能安全认证:ISO26262 ASIL-B

图6 实测连线图
雷达发射功率和调制性能的测试方法如下,雷达芯片直接通过PCB板上的微带线转WR12波导,再转成1.0mm的同轴,直接连接到UXR示波器进行测试。从测试结果可以看到,在4GHz调制带宽内,该芯片的调制线性度为0.027%。
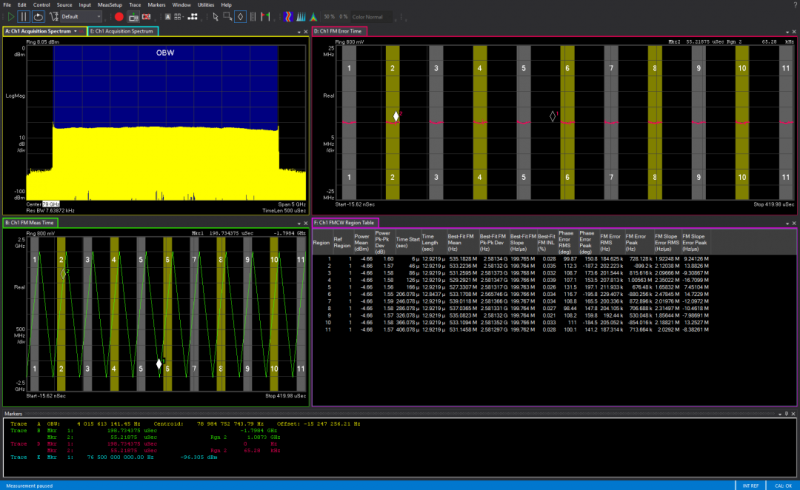
图7 调制线性度测试
下图是雷达相位调制测试结果图,可以看到FMCW的信号时域内的相位周期变化。

图8 相位调制测试
雷达发射通道间的相位差测试。利用UXR多通道和VSA多测量任务的功能,可以实现对多通道信号幅度差和相位差的测试。利用VSA 89601C 内置函数编辑功能,采用下面函数即可以实现对两通道信号相位差的测试。
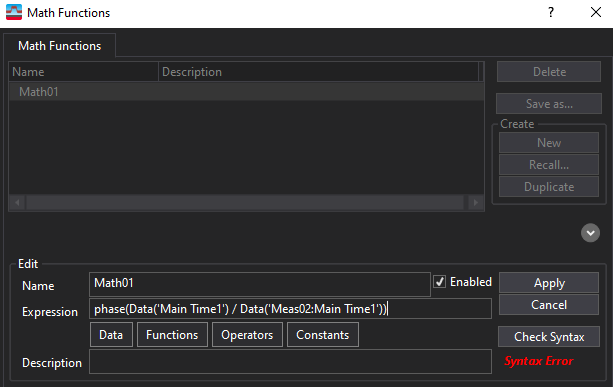
图9 VSA调制解调软件内置函数编辑功能
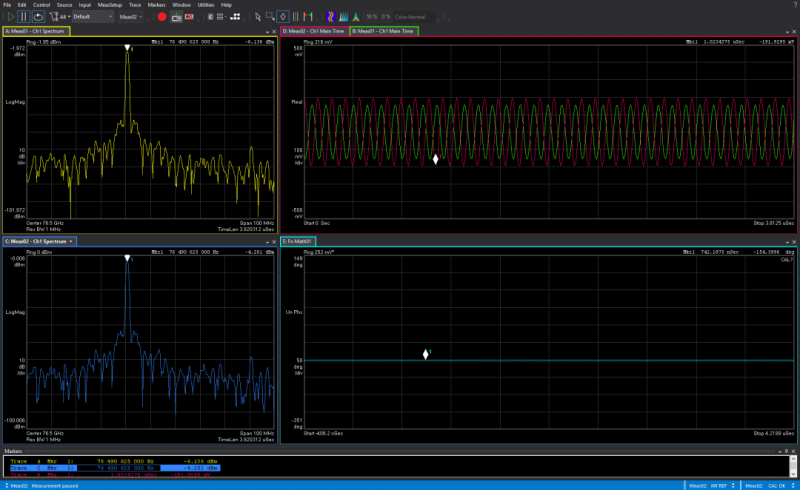
图10 VSA调制解调软件内置函数编辑功能 用于信号相位差测试
五 小结
以上本文对基于UXR实时示波器的mmW选件在汽车毫米波雷达应用的测试进行了一个简单的介绍,随着未来自动驾驶的普及,车路协同对毫米波雷达的市场需求将持续推高,为确保足够的安全性广泛的验证和测试也将成为必要任务,而实时示波器方案作为具有广泛用途的高性价比方案也必将成为重要的工具。Keysight UXR系列实时示波器的毫米波测试方案已经整装待发!
下一代智能汽车的自动驾驶的真正实现离不开对相关道路和交通流量参与的所有对象的信息的全面掌握。真正的无人驾驶不仅需要对道路环境的实时测,还需要强大的车载计算能力。所以未来的无人驾驶汽车会采用各种传感器,毫米波雷达、摄像头、激光雷达、超声波雷达,同时采用视觉传感器的融合技术和冗余技术实现对道路环境实时、可靠的探测。作为传感器的毫米波雷达,由于其特有的优势,全天候、探测距离远,是车载传感器中必不可少的。
随着毫米雷达技术的发展,特别是大带宽、高频率、高精度的雷达产品出现,对技术研发和产品本身性能指标的测试提出了很高的要求。相对而言采用数字视觉传感器的方法,在传统的3C行业已经应用成熟,目前在汽车行业应用主要是提高可靠性和稳定性并进行充分验证和测试,技术实现基本没有难点。而频域的方法,则相对是全新的技术在全新领域要实现突破并产品化,因此还处于技术探索和创新阶段,考虑到汽车自动驾驶的0失误率的要求,因而无论如何认真都是不过分的。
二 新一代汽车毫米波雷达的技术趋势和挑战
随着无人驾驶对毫米波雷达的要求,雷达技术的发展趋势是调制带宽更宽、调制波形更复杂、调制精度更高、收发通道数更多。技术背后的主要驱动因素分析如下:
1. 调制带宽更宽
在中远距离探测范围即60m以外,雷达的探测精度在1米左右,在中近距离探测范围内即60m以内,雷达的探测精度最高需要在0.1m以内。从最初的24GHz,76GHz雷达,到目前的79GHz雷达,雷达的工作带宽已经到2GHz,甚至未来会更宽。
更高的分析带宽对传统的分析仪器无论是时域还是频域均带来了极大的挑战。传统的时域方法主要是对信号进行下变频处理再采用实时示波器进行分析,但是下变频器的带宽及频响特性和噪声带来的测量误差是不可忽略的问题。而频谱仪的分析带宽和成本则一直是影响投资决策的巨大障碍。
图1 毫米波雷达带宽与分辨率的关系
2. 调制波形更复杂
传统的毫米波雷达有单帧的FMCW,或者双帧的FMCW,如图1所示为双帧调制的雷达信号。考虑到毫米波雷达的普及性和安全性,未来的雷达需要频率跳变来避免其它信号对雷达的干扰,甚至雷达会有简单的通信功能。这些技术都会使得雷达的信号越来越复杂,对于测试提出的很高的要求。需要从时域、频域、解调域,全方位的对雷达信号做解调分析。
3. 调制精度更高
当前的汽车毫米波雷达主要还是利用FMCW来实现对目标距离和速度的探测,所以发射信号本身的调制精度就非常关键。发射端的调制精度越高,雷达本身的误差就越小,探测精度就越高。目前国内毫米波雷达芯片在3.5GHz调制带宽内可以实现0.027%的调制线性度(FM INL)。这个测试不需要变频,直接在79GHz频率进行采样测试,所以测试系统的误差非常小。
过去业界传统的测试方法,都是利用下变频器对79GHz的雷达信号进行下变频,用示波器对中频信号进行采样分析。这个过程会引入下变频器和测试设备自身的误差,如带内频响误差、相位附加噪声等,这些都会影响对雷达信号分析的精度。
4. 收发通道数更多
雷达不仅需要水平角度的探测,还需要垂直角度的探测。同时对雷达角度探测的精度也会提出更高的要求。下图是4发12收的雷达天线,在实现对MIMO雷达信号处理时,要求雷达芯片通道音的幅度精度在1dB以内,相位精度在3°以内。
传统的频谱仪的有限的通道数,在针对今天的车用MIMO雷达测试明显已经不能胜任,而时域仪器——示波器的通道数向来是一大优势。因此针对毫米波MIMO雷达的测试,实时示波器必将成为未来不可忽略的玩家。
三 是德科技基于UXR系列实时示波器的mmW测试方案
针对当前,越来越多的超宽带信号应用尤其是汽车毫米波雷达的蓬勃兴起,是德科技作为业界唯一同时精通频域和时域两大领域的测量测试产品和解决方案公司,推出基于UXR系列示波器的毫米波信号分析仪系统——UXR0051AP,推翻了传统示波器用于射频信号分析的三座大山:
性能不足——UXR 10bit ADC@256GSa/s;速度太慢——UXR内置硬件DDC;示波器太贵——提供基础带宽5GHz,采用滑动窗分析高频载波信号。
UXR0051AP采用1mm信号输入端口(即模拟信号路径带宽最高达110GHz),采样率256G Sa/s,标配1通道(配置N2166A选件可后升级扩展成2通道),实际是采用UXR高频段产品的硬件进行带宽限制以支持超宽带毫米波应用。从而成功将时域的实时示波器导入频域分析,打破传统的时域数字测量行业的“内卷化”。
针对汽车毫米波雷达的测试应用,在UXR示波器上配置VSA 89601C调制解调软件,即可基于256GSa/s采样率的示波器直接对79GHz的雷达信号进行采样,避免下变频对宽频信号的幅度精度影响,同时最多4通道的实时采集测试,可以满足MIMO雷达对通道间幅度和相位测试的要求。
图2 UXR0051AP毫米波信号分析仪系统
如下典型配置提供了最高达82GHz的超宽带信号分析能力,完全覆盖汽车毫米波雷达应用:
表1 UXR0051AP毫米波信号分析仪
在配置N2166A选件升级扩展成2通道后,可以对I/Q信号同时进行分析。如果需要对更多通路信号同时进行测试分析,则可以选择UXR0254AP型号,25GHz带宽,4通道256GSa/s,硬件10bit ADC采样。4通道25GHz带宽不仅可以满足MIMO雷达对通道间幅度和相位测试的要求,对其它高速数字Serdes标准的研发和验证测试也提供了强大的支持。
这一系统具有如下能力和特点:
■ 256GSa/s实时采样,直接对82GHz以内的信号进行采样避免下变频引入的误差;
■ 最多支持四通道同步测试,通道相位精度小于0.5度(RMS);
■ 分析带宽支持10GHz,5GHz两种选项;
■ 强大的VSA矢量信号分析功能,支持各种复杂的雷达调制信号;
■ 可选带宽为2.16GHz 的DDC功能,快速进行频谱功能和调制解调测试。
四 针对实际雷达产品的实测案例
1. Dephi ESR2.5雷达
下图是Dephi ESR2.5雷达双帧雷达信号分析。ESR2.5有中距离和远距离两种探测范围,硬件有两组天线,两个发射通道。传统的频谱仪是很难测试两个通道内的不同功率。利用VSA软件的触发同步功能,可以分别选择不同带宽信号的同步,分别测试两个发射通道的发射功率。
图3 VSA软件中FMCW不同雷达参数同步设置
图4 VSA软件触发同步用于测试FMCW雷达信号
2. 基于UXR的mmW选件和VSA 89601C测试方案,对加特兰公司CAL77S244-AE芯片进行实测验证。
图5 加特兰毫米波雷达芯片
Alps 4T4R 77/79GHz Radar SoC (CAL77S244-AE)的主要特点如下:
■ 汽车级全集成毫米波雷达SoC
■ 发射通道:4,集成移相器
■ 接收通道:4,集成功率饱和检测器
■ 工作频率:76~81GHz,最大支持5G扫频带宽
■ FMCW波形生成器:用户自定义,支持自动增益控制、帧交错等功能
■ 高速ADC:采样率高达50MSPS,同时支持降采样功能
■ 雷达信号处理基带:硬件电路实现完整雷达信号处理
■ CPU:300MHz ARC® EM6
■ 片内存储空间:2.625MB RAM
■ 支持SoC级联功能
■ 外设接口:CAN/CAN-FD/SPI/QSPI/UART/I²C/LVDS/ GPIOs
■ AEC-Q100规范:Grade2
■ 功能安全认证:ISO26262 ASIL-B
图6 实测连线图
雷达发射功率和调制性能的测试方法如下,雷达芯片直接通过PCB板上的微带线转WR12波导,再转成1.0mm的同轴,直接连接到UXR示波器进行测试。从测试结果可以看到,在4GHz调制带宽内,该芯片的调制线性度为0.027%。
图7 调制线性度测试
下图是雷达相位调制测试结果图,可以看到FMCW的信号时域内的相位周期变化。
图8 相位调制测试
雷达发射通道间的相位差测试。利用UXR多通道和VSA多测量任务的功能,可以实现对多通道信号幅度差和相位差的测试。利用VSA 89601C 内置函数编辑功能,采用下面函数即可以实现对两通道信号相位差的测试。
图9 VSA调制解调软件内置函数编辑功能
图10 VSA调制解调软件内置函数编辑功能 用于信号相位差测试
五 小结
以上本文对基于UXR实时示波器的mmW选件在汽车毫米波雷达应用的测试进行了一个简单的介绍,随着未来自动驾驶的普及,车路协同对毫米波雷达的市场需求将持续推高,为确保足够的安全性广泛的验证和测试也将成为必要任务,而实时示波器方案作为具有广泛用途的高性价比方案也必将成为重要的工具。Keysight UXR系列实时示波器的毫米波测试方案已经整装待发!



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
