




 广告
广告





















































PIV测试技术在汽车风洞中的应用
2021-02-01 12:28:22· 来源:中汽中心空气动力学实验室

PIV测量系统介绍PIV(Particle Image Velocimetry)系统,即粒子图像测速技术,是七十年代末利用图像处理技术发展起来的一种流动测量技术。随着近几十年的不断完
PIV测量系统介绍
PIV(Particle Image Velocimetry)系统,即粒子图像测速技术,是七十年代末利用图像处理技术发展起来的一种流动测量技术。随着近几十年的不断完善和发展,它克服了以往空间单点测量的局限,能够进行平面二维或空间三维流场测量,是一种非接触的、瞬态、全场流场测量的技术[1]。
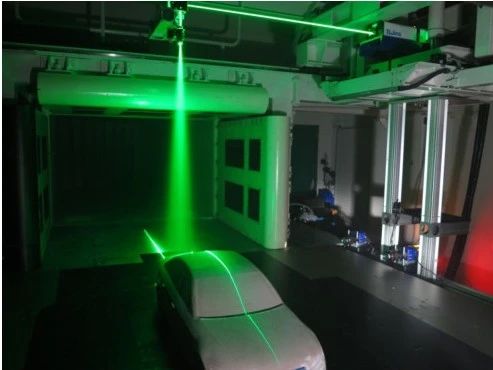
图1 PIV系统在风洞中测量车辆尾流[2]
传统的流态显示、单点测量技术等为了解汽车周围流场的流动机理、湍流结构等方面做出了很大贡献,提供了大量的实验数据,但汽车是有着复杂曲面造型的运动体,其周围的流场结构极其复杂,这些技术方法仍然不能满足更深层次流动机理、湍流特性研究的需要。PIV技术作为研究各种复杂流场的一种基本手段,已广泛应用于各种流动中,从定常到非定常、低速到高速、单相到多相,突破了空间单点测量的局限,可在同一时刻记录整个测量平面的有关信息,从而获得流动的瞬时速度场、脉动速度场、涡量场和雷诺应力分布等,因此,PIV技术很适合湍流结构复杂的流场测量[1]。
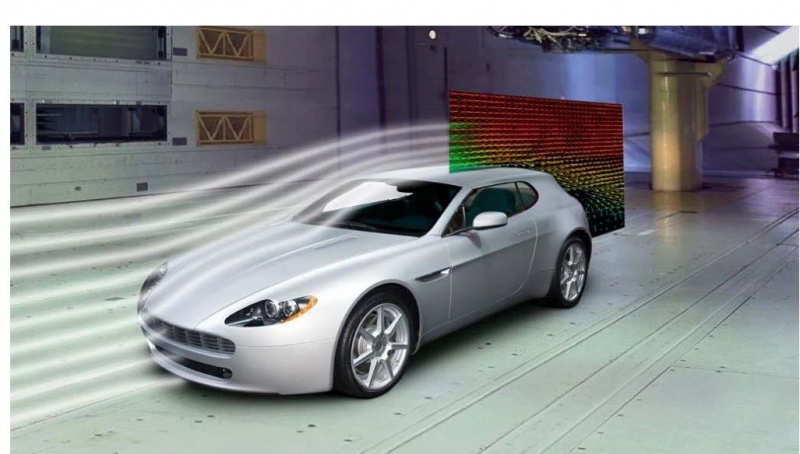
图2 轿车尾流的大尺度PIV测量 https://www.lavision.de/en/applications/automotive/index.php
风洞实验室是研究汽车空气动力特性的重要方法之一,将PIV系统应用于风洞实验中,可有助于提高汽车空气动力学特性测量精度和优化效率。
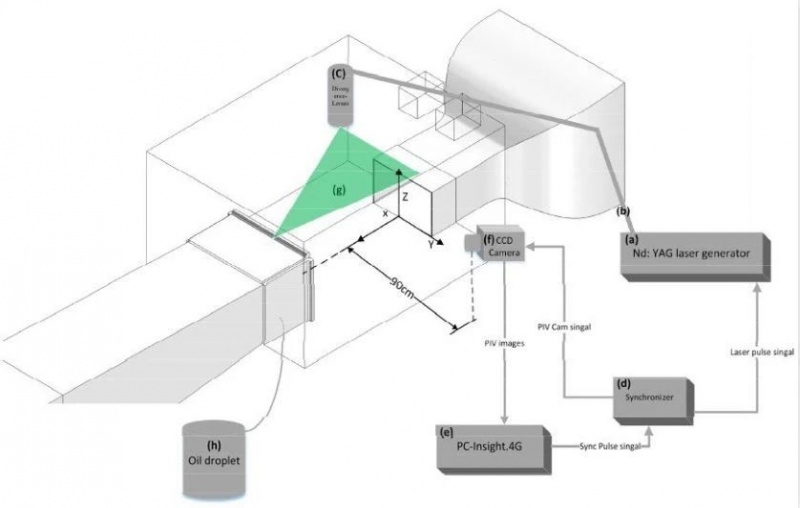
图3 PIV测量系统搭建在汽车风洞中[1]
PIV系统组成和测量原理
PIV系统主要由成像系统、图像分析系统、示踪粒子发生器系统组成。成像系统由激光器、片光元件、导光臂、激光脉冲同步器、CCD摄像机组成;图像分析系统主要由图像采集板、图像分析软件及计算机组成;示踪粒子发生器系统由示踪粒子和烟雾发生器组成[1]。
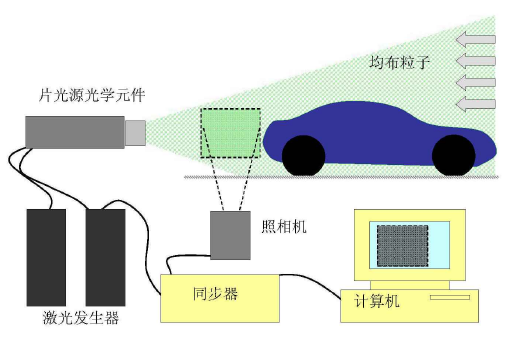
图4 PIV系统的组成[4]
在利用PIV技术测量流速时,需要在流场中均匀散布跟随性、反光性良好且比重与流体相当的示踪粒子。将激光发生器产生的光束经透镜散射后形成一定厚度的片光源入射到流场待测区域,CCD相机以垂直于片光源的方向对准该区域。利用示踪对光的散射作用,记录下两次脉冲激光曝光时粒子的图像,形成两幅PIV底片(即一对相同待测区域、不同时刻的图片),底片上记录的是整个待测区域的粒子图像。采用图像处理技术将所得图像分成许多很小的区域(称为查问域),采用自相关或互相关统计技术求取查问域内粒子位移的大小和方向,脉冲时间间隔已设定,粒子的速度矢量即可求出。对查问域中所有粒子的数据进行统计平均可得该查问域的速度矢量,对所有查问域进行上述判定和统计可得出整个流场的速度矢量场、涡量场、流线等流场特性参数分布。在实测时,对同一位置可拍摄多对曝光图片,这样能够更全面、更准确地反映出整个流场内部的流动状态[4]。
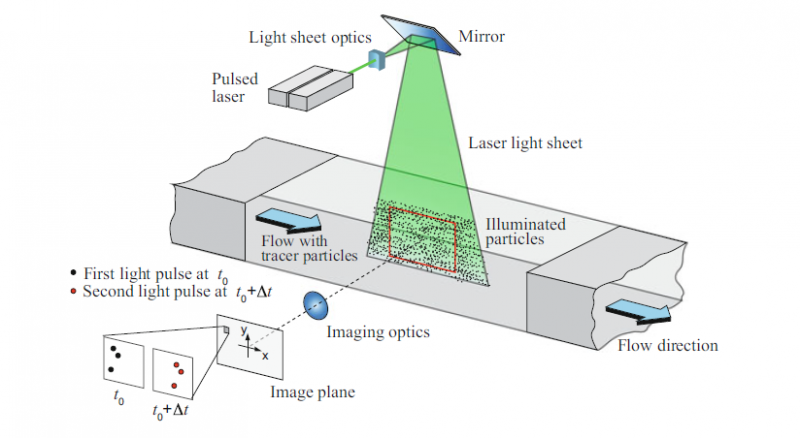
图5 PIV测试技术基本原理 https://www.fithydro.wiki/index.php/File:Piv_2d_system.png
PIV测试技术在汽车风洞中的应用
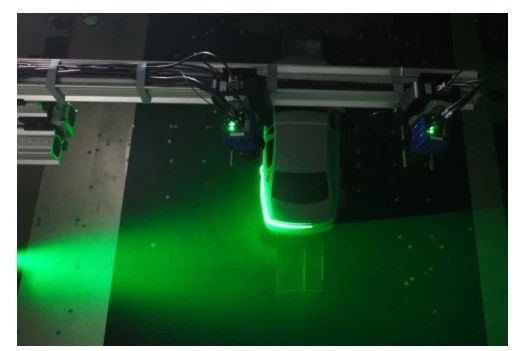
图6 PIV系统测量轿车尾流,并用移测架控制相机位置[2]

图7 PIV系统测量某卡车模型尾流[5]
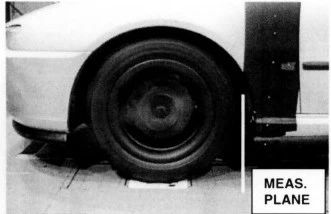
图8 PIV系统测量转动车轮尾部流场[6]
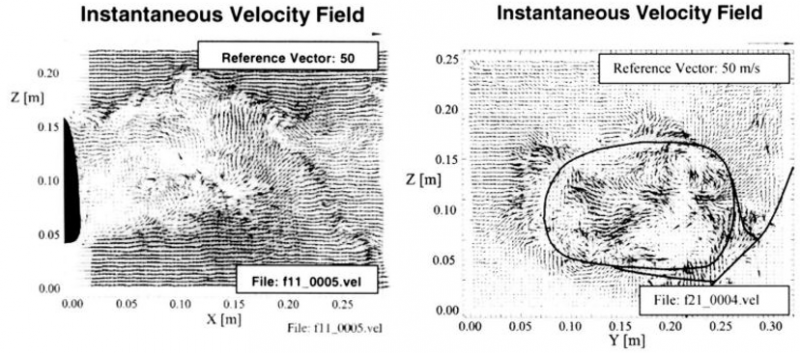
图9 PIV测量汽车后视镜尾流纵向垂直面和横向垂直面
瞬态速度域[6]
展望
传统常规的二维PIV系统主要通过一个CCD或CMOS相机测量二维平面两个方向的速度分量(2D2C);Stereo PIV可以使用两个相机通过一个平面测量三个方向的速度分量(2D3C)。如今,PIV技术不断迭代更新以及对流场测速新课题的挑战不断出现,迫切需要三维PIV的深入研究和实践,如Volumetric PIV(或TOMO PIV)可以通过两个或更多相机测量空间内的三个方向的的速度分量(3D3C),对流场某个容积内瞬时或连续的三维速度测量等,以更好地揭示流场内部复杂的三维结构,更深刻地反映流场的流动机理,从本质上反映流场的性质。
当前,为了完善汽车周围流场的测量方法并提高测试效率,有学者已经通过外出服和自动控制技术,开发出二维粒子成像册数系统的自动测量技术(自动PIV)。甚至也有利用机械人PIV系统对车辆周围三维流场自动且连续地测量。
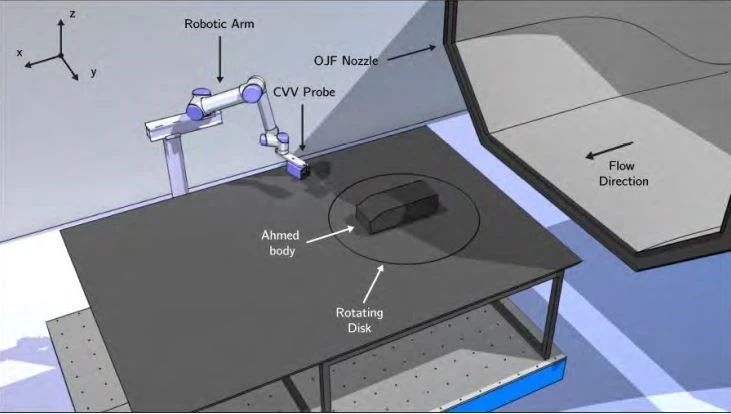
图10 机器人PIV系统测量汽车模型风洞流场[7]
参考文献:
[1] 陈细军等,PIV技术在汽车模型风洞中的应用,2009
[2] Timo Kuthada et al., The Effects of CoolingAir on the Flow Field around a Vehicle,2016
[3] Yuyu Zhu et al., Application of theVortex Identifcation Algorithms in the Study of the Shear Layer in A 3/4 OpenJet Automotive Wind Tunnel, 2018
[4] 张英朝等,汽车风洞的PIV试验技术,2009
[5] James T. Heineck et al., 3D PIV inWind Tunnel Applications Measurements of a Truck Wake, 1999
[6] Antonello Cogotti et al., Presentation of Flow FieldInvestigation by PIV on a Full-Scale Car in the Pininfarina Wind Tunnel, 2000
[7] Andrea Sciacchitano et al., Investigation of the Ahmed bodycross-wind flow topology by robotic volumetric PIV, 2019
PIV(Particle Image Velocimetry)系统,即粒子图像测速技术,是七十年代末利用图像处理技术发展起来的一种流动测量技术。随着近几十年的不断完善和发展,它克服了以往空间单点测量的局限,能够进行平面二维或空间三维流场测量,是一种非接触的、瞬态、全场流场测量的技术[1]。
图1 PIV系统在风洞中测量车辆尾流[2]
传统的流态显示、单点测量技术等为了解汽车周围流场的流动机理、湍流结构等方面做出了很大贡献,提供了大量的实验数据,但汽车是有着复杂曲面造型的运动体,其周围的流场结构极其复杂,这些技术方法仍然不能满足更深层次流动机理、湍流特性研究的需要。PIV技术作为研究各种复杂流场的一种基本手段,已广泛应用于各种流动中,从定常到非定常、低速到高速、单相到多相,突破了空间单点测量的局限,可在同一时刻记录整个测量平面的有关信息,从而获得流动的瞬时速度场、脉动速度场、涡量场和雷诺应力分布等,因此,PIV技术很适合湍流结构复杂的流场测量[1]。
图2 轿车尾流的大尺度PIV测量 https://www.lavision.de/en/applications/automotive/index.php
风洞实验室是研究汽车空气动力特性的重要方法之一,将PIV系统应用于风洞实验中,可有助于提高汽车空气动力学特性测量精度和优化效率。
图3 PIV测量系统搭建在汽车风洞中[1]
PIV系统组成和测量原理
PIV系统主要由成像系统、图像分析系统、示踪粒子发生器系统组成。成像系统由激光器、片光元件、导光臂、激光脉冲同步器、CCD摄像机组成;图像分析系统主要由图像采集板、图像分析软件及计算机组成;示踪粒子发生器系统由示踪粒子和烟雾发生器组成[1]。
图4 PIV系统的组成[4]
在利用PIV技术测量流速时,需要在流场中均匀散布跟随性、反光性良好且比重与流体相当的示踪粒子。将激光发生器产生的光束经透镜散射后形成一定厚度的片光源入射到流场待测区域,CCD相机以垂直于片光源的方向对准该区域。利用示踪对光的散射作用,记录下两次脉冲激光曝光时粒子的图像,形成两幅PIV底片(即一对相同待测区域、不同时刻的图片),底片上记录的是整个待测区域的粒子图像。采用图像处理技术将所得图像分成许多很小的区域(称为查问域),采用自相关或互相关统计技术求取查问域内粒子位移的大小和方向,脉冲时间间隔已设定,粒子的速度矢量即可求出。对查问域中所有粒子的数据进行统计平均可得该查问域的速度矢量,对所有查问域进行上述判定和统计可得出整个流场的速度矢量场、涡量场、流线等流场特性参数分布。在实测时,对同一位置可拍摄多对曝光图片,这样能够更全面、更准确地反映出整个流场内部的流动状态[4]。
图5 PIV测试技术基本原理 https://www.fithydro.wiki/index.php/File:Piv_2d_system.png
PIV测试技术在汽车风洞中的应用
图6 PIV系统测量轿车尾流,并用移测架控制相机位置[2]
图7 PIV系统测量某卡车模型尾流[5]
图8 PIV系统测量转动车轮尾部流场[6]
图9 PIV测量汽车后视镜尾流纵向垂直面和横向垂直面
瞬态速度域[6]
展望
传统常规的二维PIV系统主要通过一个CCD或CMOS相机测量二维平面两个方向的速度分量(2D2C);Stereo PIV可以使用两个相机通过一个平面测量三个方向的速度分量(2D3C)。如今,PIV技术不断迭代更新以及对流场测速新课题的挑战不断出现,迫切需要三维PIV的深入研究和实践,如Volumetric PIV(或TOMO PIV)可以通过两个或更多相机测量空间内的三个方向的的速度分量(3D3C),对流场某个容积内瞬时或连续的三维速度测量等,以更好地揭示流场内部复杂的三维结构,更深刻地反映流场的流动机理,从本质上反映流场的性质。
当前,为了完善汽车周围流场的测量方法并提高测试效率,有学者已经通过外出服和自动控制技术,开发出二维粒子成像册数系统的自动测量技术(自动PIV)。甚至也有利用机械人PIV系统对车辆周围三维流场自动且连续地测量。
图10 机器人PIV系统测量汽车模型风洞流场[7]
参考文献:
[1] 陈细军等,PIV技术在汽车模型风洞中的应用,2009
[2] Timo Kuthada et al., The Effects of CoolingAir on the Flow Field around a Vehicle,2016
[3] Yuyu Zhu et al., Application of theVortex Identifcation Algorithms in the Study of the Shear Layer in A 3/4 OpenJet Automotive Wind Tunnel, 2018
[4] 张英朝等,汽车风洞的PIV试验技术,2009
[5] James T. Heineck et al., 3D PIV inWind Tunnel Applications Measurements of a Truck Wake, 1999
[6] Antonello Cogotti et al., Presentation of Flow FieldInvestigation by PIV on a Full-Scale Car in the Pininfarina Wind Tunnel, 2000
[7] Andrea Sciacchitano et al., Investigation of the Ahmed bodycross-wind flow topology by robotic volumetric PIV, 2019






最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
