




 广告
广告





















































美国联邦公路管理局CARMA系统介绍
2021-02-01 17:34:48· 来源:北京市高级别自动驾驶示范区

关于CARMACARMA系统(CARMA: Cooperative Automation Research Mobility Applications)是美国联邦公路管理局(FHWA)牵头的一项计划,旨在促进协同自动驾驶的研发。
关于CARMA
CARMA系统(CARMA: Cooperative Automation Research Mobility Applications)是美国联邦公路管理局(FHWA)牵头的一项计划,旨在促进协同自动驾驶的研发。CARMA的首要目标是通过自动驾驶车辆和道路基础设施的协同工作来提高交通运输的效率和安全性。
CARMA系统是一个开源平台,CARMA平台允许自动驾驶车辆通过通信与基础设施(如信号灯)和其他车辆进行交互和协作。通过使用CARMA云实时提供道路前方的信息(例如交通事故、天气等),CARMA平台使自动驾驶车辆能够与基础设施和其他车辆进行交互和协作, 改善交通效率及出行安全性。
CARMA系统发展的三个阶段
CARMA于2014年开始开发并进行概念的初步验证,CARMA2在2018年迁移到机器人操作系统(ROS)架构,CARMA3的开发于2018年8月开始。
CARMA 1 (2014-2016):
概念的初步印证
个体应用收集
在MicroAutobox上运行Simulink/dSpace
演示多个应用
1)开发列队算法
2)改进EAD(eco-approach and Departure)算法
3)改进速度协调算法
4)改进变道合并算法
CARMA 2 (2016-2018):
SAE L1级自动驾驶(速度控制),可进行L2级
基于ROS
灵活性:可以安装于各种类别的车型上
接受应用于研究的第三方插件 (指导算法)
包括简单的应用:
1)运用ACC
2)协作式变道
3)混合队列行驶
4)交叉口信号控制
5)速度协调
CARMA 2运用5个插件和42000行代码,完成了在亚伯丁测试中心24天共22000英里的封闭道路测试。通过机器人操作,实现人机交互界面(HMI)显示相关驾驶信息。CARMA 2的ROS系统包括了引导/路径规划插件、车辆环境信息(V2V/V2I交通、传感器融合等)以及设备驱动等。作为开放源码软件(OSS)开发的一个平台,用于与行业进行协作化自动驾驶研究。
CARMA 3 (2018-2020):
SAE L2级自动驾驶(速度和转向控制),可进行L3级
更复杂的协作列表,譬如V2V
增强的变道合并编排
增强的列队行驶(轿车与卡车)
强调TSMO的基础设施交互(工作区、交通事故管理、天气等)
应急车辆应用与交互
CARMA3架构(如下图)
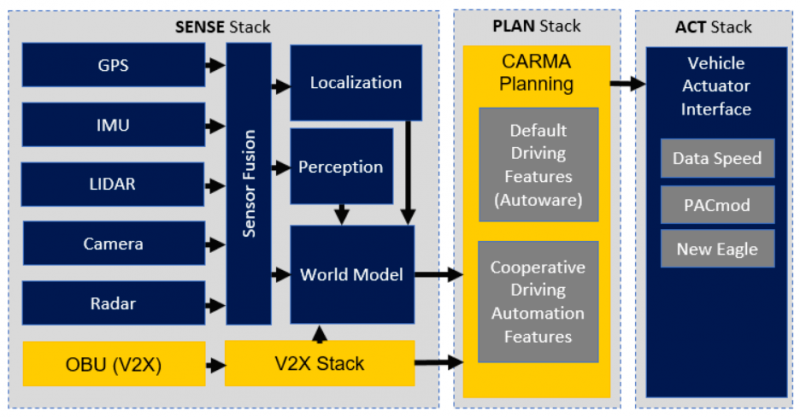
(图片来源:FHWA)
CARMA 3阶段主要与美国联邦高速公路管理局、美国联邦汽车运输安全管理局、智能交通系统联合规划办公室以及Volpe国家运输系统中心合作,完成协作式自动驾驶、交通管理、标准、合作、公共安全、货运以及数据等工作。
CARMA 3由3个项目周期、6个季度性在线研讨会、7辆配备ADS的车辆以及多个合作伙伴完成。通过ROS系统实现人机交互界面(HMI)显示相关驾驶信息。运用ROS系统以及LIDAR完成相应的任务。CARMA 3作为在开放式环境下开发出来的平台,运用敏捷的软件开发过程以与相关的利益团体进行合作。
CARMA系统构成
CARMA系统由四个产品构成:CARMA云、CARMA平台、CARMA通讯和CARMA道路。
CARMA 云
CARMA云于2019年秋季发布,它是一种可下载的基于云的OSS(运营支撑系统)服务,源代码发布在GitHub平台(https://github.com/usdot-fhwa-stol)。CARMA云提供基于云的交通系统管理、双向通信、数据交换和同时管理多个远程车辆。CARMA 云支持和促进运输系统管理和运营(TSMO)战略的安全运行。这项技术通过通信促进车辆和道路基础设施之间的合作,通过CARMA 云提供的信息(如基本出行、交通事故管理、道路天气管理和工作区管理),自动驾驶车辆能够与基础设施和其他车辆进行交互和合作,从而提高现有交通系统的通行效率。
CARMA 平台
CARMA 平台是一个可下载的,基于车辆的平台。CARMA 平台结合CARMA 云提供的实时交通运营规则和其他重要基础设施信息,使自动驾驶车辆能够与其他道路要素(包括车辆、基础设施和其它易受伤害的道路用户)通过移动设备进行交互和协作。CARMA平台利用了自动软件开发社区开发的自动驾驶系统(ADS)功能,使研究人员可以将更多精力放在协同工作上。
CARMA 通讯
CARMA通讯是可下载的并适用于非自动驾驶车辆,通过车辆的应用程序,与其他车辆进行交流,以参与自动驾驶。CARMA通讯通过诸如车载单元(OBU)或蜂窝网络之类的设备将非自动车辆集成到自动驾驶车辆系统中,该设备将警报消息发送或共享给其他非自动驾驶车辆。
CARMA 道路
CARMA 道路是车辆与路侧基础设施通讯的平台,实现基础设施与不同模式、用户和车辆之间的通信,以优化运输系统管理、运营和安全。
CARMA系统提供五个工具:仿真、建模、测试、分析和安全
1.仿真:在CARMA和城市交通模拟(SUMO)的基础上构建了开源仿真环境。
2.建模:按比例缩小自动驾驶测试车辆,由自动驾驶社区的开发者完成,既可以缩减测试成本,又可以扩大测试规模。
3.测试:与全国各地的试验场地协同合作,为CARMA和协同自动驾驶合作伙伴提供测试场地。
4.分析:数据管理、分析、机器学习和人工智能,支持协同自动驾驶车辆和传统交通数据的管理、融合和分析。
5.安全:现场测试、模拟测试、驾驶员在环测试、高速公路驾驶模拟测试和CARMA系统都适用于自动驾驶测试车辆、协同自动驾驶车辆和非自动驾驶车辆。
CARMA系统的协作和支持社区
1.协作:该项目与学术机构合作进行研究和测试,同时提供一个活跃的用户社区推进协同自动驾驶。CARMA协作组织开展了许多宣传活动,以提高相关单位的参与意识和参与度,包括线上会议,线下活动和推广宣传(网站、出版物、社交媒体和多媒体)。
2.支持:为CARMA所有级别的用户提供支持服务,包括来自专家的技术支持,而且无需用户额外付费。提供的服务包括:
(1)CARMA软件故障排除;
(2)CARMA系统架构;
(3)CARMA开发的消息集;
(4)开放标准;
(5)数据存储(即机器人操作系统[ROS]包);
(6)现有文档、工具和联系方式;
(7)技术远程和现场协助,用于模块开发或测试;
(8)有关CARMA应用的培训和演示。
1.Vanden Plas (2021年3月启动)
主要用例:核心功能
产品:CARMA平台
功能:
自动驾驶控制 :CARMA 平台能够控制车辆的速度和轨迹。
自动驾驶感知 :CARMA 平台能够识别现实世界中的物体。
自动驾驶规划:CARMA 平台能够规划路线和驾驶操作。
2. Elise (2021年4月启动)
主要用例:ROS2迁移的准备
产品:CARMA平台,CARMA 通讯
功能 :
Ubuntu 18
ROS1 Noetic
3. Zephyr(2021年4月启动)
主要用例:天气,事件管理
产品:CARMA平台,CARMA云,CARMA通讯
功能:
CTM,紧急挪移规则
CTM,地理围栏Geofence间隙控制
CLC,协作车道合并
云世界模型,车道封闭
4.Yenko(2021年5月启动)
主要用例:基本行程
产品:CARMA平台,CARMA云,CARMA街道
功能:
自动驾驶换道
车道内避让(CAC)
协作车道变更、拥堵车道并入(CLC)
协作交通监控(CTM)
协作车道跟随(CLF)
5.A1(2021年6月启动)
主要用例:ROS2组件
产品:CARMA平台,CARMA云,CARMA街道
功能:
协同交通信号(CTS),固定信号传输
云世界模型
路权协同
协同交通信号(CTS),感应信号传输
6.Battista / Fiesta(2021年7月启动)
主要用例:TSMO Adaptive Signals (Fiesta), Port Drayage (Battista)
产品:CARMA平台,CARMA云,CARMA街道
功能:
CTS,自适应信号传输
协作规划、停止和等待
协作规划、路线选择
7.Cabin(2021年10月启动)
主要用例:TSMO动态车道分配,IHP2
产品:CARMA平台,CARMA云,CARMA街道
功能:
CTM,动态车道分配
CLF,模式、操作、解除
8. Divo(2021年12月启动)
主要用例:无(ROS2迁移)
产品:CARMA平台,CARMA Messenger
功能:
ROS2支持
参考文献:
1、CARMA网站
2、CARMA Cloud and CARMA Streets,Taylor Lochrane, FHWA, November 10, 2020
3、CARMA平台 ,智能交通前沿科技
4、美国交通部:协作式自动驾驶系统研究,佐思汽研
CARMA系统(CARMA: Cooperative Automation Research Mobility Applications)是美国联邦公路管理局(FHWA)牵头的一项计划,旨在促进协同自动驾驶的研发。CARMA的首要目标是通过自动驾驶车辆和道路基础设施的协同工作来提高交通运输的效率和安全性。
CARMA系统是一个开源平台,CARMA平台允许自动驾驶车辆通过通信与基础设施(如信号灯)和其他车辆进行交互和协作。通过使用CARMA云实时提供道路前方的信息(例如交通事故、天气等),CARMA平台使自动驾驶车辆能够与基础设施和其他车辆进行交互和协作, 改善交通效率及出行安全性。
CARMA系统发展的三个阶段
CARMA于2014年开始开发并进行概念的初步验证,CARMA2在2018年迁移到机器人操作系统(ROS)架构,CARMA3的开发于2018年8月开始。
CARMA 1 (2014-2016):
概念的初步印证
个体应用收集
在MicroAutobox上运行Simulink/dSpace
演示多个应用
1)开发列队算法
2)改进EAD(eco-approach and Departure)算法
3)改进速度协调算法
4)改进变道合并算法
CARMA 2 (2016-2018):
SAE L1级自动驾驶(速度控制),可进行L2级
基于ROS
灵活性:可以安装于各种类别的车型上
接受应用于研究的第三方插件 (指导算法)
包括简单的应用:
1)运用ACC
2)协作式变道
3)混合队列行驶
4)交叉口信号控制
5)速度协调
CARMA 2运用5个插件和42000行代码,完成了在亚伯丁测试中心24天共22000英里的封闭道路测试。通过机器人操作,实现人机交互界面(HMI)显示相关驾驶信息。CARMA 2的ROS系统包括了引导/路径规划插件、车辆环境信息(V2V/V2I交通、传感器融合等)以及设备驱动等。作为开放源码软件(OSS)开发的一个平台,用于与行业进行协作化自动驾驶研究。
CARMA 3 (2018-2020):
SAE L2级自动驾驶(速度和转向控制),可进行L3级
更复杂的协作列表,譬如V2V
增强的变道合并编排
增强的列队行驶(轿车与卡车)
强调TSMO的基础设施交互(工作区、交通事故管理、天气等)
应急车辆应用与交互
CARMA3架构(如下图)
(图片来源:FHWA)
CARMA 3阶段主要与美国联邦高速公路管理局、美国联邦汽车运输安全管理局、智能交通系统联合规划办公室以及Volpe国家运输系统中心合作,完成协作式自动驾驶、交通管理、标准、合作、公共安全、货运以及数据等工作。
CARMA 3由3个项目周期、6个季度性在线研讨会、7辆配备ADS的车辆以及多个合作伙伴完成。通过ROS系统实现人机交互界面(HMI)显示相关驾驶信息。运用ROS系统以及LIDAR完成相应的任务。CARMA 3作为在开放式环境下开发出来的平台,运用敏捷的软件开发过程以与相关的利益团体进行合作。
CARMA系统构成
CARMA系统由四个产品构成:CARMA云、CARMA平台、CARMA通讯和CARMA道路。
CARMA 云
CARMA云于2019年秋季发布,它是一种可下载的基于云的OSS(运营支撑系统)服务,源代码发布在GitHub平台(https://github.com/usdot-fhwa-stol)。CARMA云提供基于云的交通系统管理、双向通信、数据交换和同时管理多个远程车辆。CARMA 云支持和促进运输系统管理和运营(TSMO)战略的安全运行。这项技术通过通信促进车辆和道路基础设施之间的合作,通过CARMA 云提供的信息(如基本出行、交通事故管理、道路天气管理和工作区管理),自动驾驶车辆能够与基础设施和其他车辆进行交互和合作,从而提高现有交通系统的通行效率。
CARMA 平台
CARMA 平台是一个可下载的,基于车辆的平台。CARMA 平台结合CARMA 云提供的实时交通运营规则和其他重要基础设施信息,使自动驾驶车辆能够与其他道路要素(包括车辆、基础设施和其它易受伤害的道路用户)通过移动设备进行交互和协作。CARMA平台利用了自动软件开发社区开发的自动驾驶系统(ADS)功能,使研究人员可以将更多精力放在协同工作上。
CARMA 通讯
CARMA通讯是可下载的并适用于非自动驾驶车辆,通过车辆的应用程序,与其他车辆进行交流,以参与自动驾驶。CARMA通讯通过诸如车载单元(OBU)或蜂窝网络之类的设备将非自动车辆集成到自动驾驶车辆系统中,该设备将警报消息发送或共享给其他非自动驾驶车辆。
CARMA 道路
CARMA 道路是车辆与路侧基础设施通讯的平台,实现基础设施与不同模式、用户和车辆之间的通信,以优化运输系统管理、运营和安全。
CARMA系统提供五个工具:仿真、建模、测试、分析和安全
1.仿真:在CARMA和城市交通模拟(SUMO)的基础上构建了开源仿真环境。
2.建模:按比例缩小自动驾驶测试车辆,由自动驾驶社区的开发者完成,既可以缩减测试成本,又可以扩大测试规模。
3.测试:与全国各地的试验场地协同合作,为CARMA和协同自动驾驶合作伙伴提供测试场地。
4.分析:数据管理、分析、机器学习和人工智能,支持协同自动驾驶车辆和传统交通数据的管理、融合和分析。
5.安全:现场测试、模拟测试、驾驶员在环测试、高速公路驾驶模拟测试和CARMA系统都适用于自动驾驶测试车辆、协同自动驾驶车辆和非自动驾驶车辆。
CARMA系统的协作和支持社区
1.协作:该项目与学术机构合作进行研究和测试,同时提供一个活跃的用户社区推进协同自动驾驶。CARMA协作组织开展了许多宣传活动,以提高相关单位的参与意识和参与度,包括线上会议,线下活动和推广宣传(网站、出版物、社交媒体和多媒体)。
2.支持:为CARMA所有级别的用户提供支持服务,包括来自专家的技术支持,而且无需用户额外付费。提供的服务包括:
(1)CARMA软件故障排除;
(2)CARMA系统架构;
(3)CARMA开发的消息集;
(4)开放标准;
(5)数据存储(即机器人操作系统[ROS]包);
(6)现有文档、工具和联系方式;
(7)技术远程和现场协助,用于模块开发或测试;
(8)有关CARMA应用的培训和演示。
1.Vanden Plas (2021年3月启动)
主要用例:核心功能
产品:CARMA平台
功能:
自动驾驶控制 :CARMA 平台能够控制车辆的速度和轨迹。
自动驾驶感知 :CARMA 平台能够识别现实世界中的物体。
自动驾驶规划:CARMA 平台能够规划路线和驾驶操作。
2. Elise (2021年4月启动)
主要用例:ROS2迁移的准备
产品:CARMA平台,CARMA 通讯
功能 :
Ubuntu 18
ROS1 Noetic
3. Zephyr(2021年4月启动)
主要用例:天气,事件管理
产品:CARMA平台,CARMA云,CARMA通讯
功能:
CTM,紧急挪移规则
CTM,地理围栏Geofence间隙控制
CLC,协作车道合并
云世界模型,车道封闭
4.Yenko(2021年5月启动)
主要用例:基本行程
产品:CARMA平台,CARMA云,CARMA街道
功能:
自动驾驶换道
车道内避让(CAC)
协作车道变更、拥堵车道并入(CLC)
协作交通监控(CTM)
协作车道跟随(CLF)
5.A1(2021年6月启动)
主要用例:ROS2组件
产品:CARMA平台,CARMA云,CARMA街道
功能:
协同交通信号(CTS),固定信号传输
云世界模型
路权协同
协同交通信号(CTS),感应信号传输
6.Battista / Fiesta(2021年7月启动)
主要用例:TSMO Adaptive Signals (Fiesta), Port Drayage (Battista)
产品:CARMA平台,CARMA云,CARMA街道
功能:
CTS,自适应信号传输
协作规划、停止和等待
协作规划、路线选择
7.Cabin(2021年10月启动)
主要用例:TSMO动态车道分配,IHP2
产品:CARMA平台,CARMA云,CARMA街道
功能:
CTM,动态车道分配
CLF,模式、操作、解除
8. Divo(2021年12月启动)
主要用例:无(ROS2迁移)
产品:CARMA平台,CARMA Messenger
功能:
ROS2支持
参考文献:
1、CARMA网站
2、CARMA Cloud and CARMA Streets,Taylor Lochrane, FHWA, November 10, 2020
3、CARMA平台 ,智能交通前沿科技
4、美国交通部:协作式自动驾驶系统研究,佐思汽研



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
