




 广告
广告





















































关于SOTIF预期功能安全的理解
2021-02-11 20:49:51· 来源:汽车电子与软件 作者:AgingMoon

目的在汽车电子领域,已经有了ISO26262这样针对系统的功能安全的标准,为啥同在汽车领域的自动驾驶,需要SOTIF(ISO21448)这样的预期功能安全呢?原因是,在自
目的
在汽车电子领域,已经有了ISO26262这样针对系统的功能安全的标准,为啥同在汽车领域的自动驾驶,需要SOTIF(ISO21448)这样的预期功能安全呢?原因是,在自动驾驶领域,在系统没有报故障的情况下,也有可能导致一些危害。因此针对E/E失效外导致的危害,SOTIF是汽车功能安全的一个补充。
简单来说,ISO26262针对:
E/E系统的失效
SOTIF针对以下两个场景:
系统或组件的性能受限,导致预期功能不可达
系统的可预期误用(misuse)/或直译为合理可预期误用
2、关键概念说明
2.1 SOTIF
Safety Of The Intended Functionality,即预期功能安全。
2.2 Misuse
误用,指的是不按照设计系统的要求,去使用系统,在SOTIF中,什么样的视为误用呢?
如ADAS系统提出明确的 通知警告,告知驾驶员/安全员需要做出相应的接管或反馈时,同时驾驶员也充分理解该 通知警告,但是驾驶员故意忽略,此类情况,可以视为误用;
当驾驶员/安全员,有意违反ADAS的设计,以某种形式去操作ADAS,此类情况,可视为误用。
这里需要对比一下,非误用场景:
驾驶员对ADAS系统、自动驾驶系统发出的通知或警告,感到困惑,则不是误用;
驾驶员私自修改ADAS、自动驾驶系统,则属于功能滥用。
大家可以思考一下,淘宝上买的帮人握住方向盘,骗系统的行为,属于什么?
2.3 Triggering Event
Triggering Event,驱动事件,指的是特定驾驶条件下,触发输入系统,可能导致危害事件。
直接拿标准的例子说明:如在高速路上,系统的AEB功能开启,此处误识别一个道路标志,导致车辆以-0.5g的减速度刹车5s。
这样的一个场景条件,就是所谓的驱动事件。
2.4 Validation
Validation,确认,指一系列增加系统符合预期功能的活动,这里主要和Verification进行区分说明,Verification主要针对Area2场景,Validation活动主要针对Area 3场景。其中verification 主要侧重于已知场景的测试,如边界测试-需求测试-注入测试-MIL-SIL-hil测试等。Validation,则注重于未知场景的测试,如随机测试用例测试-长时间测试-根据经验测试-分析最坏场景测试等。
2.5 Area
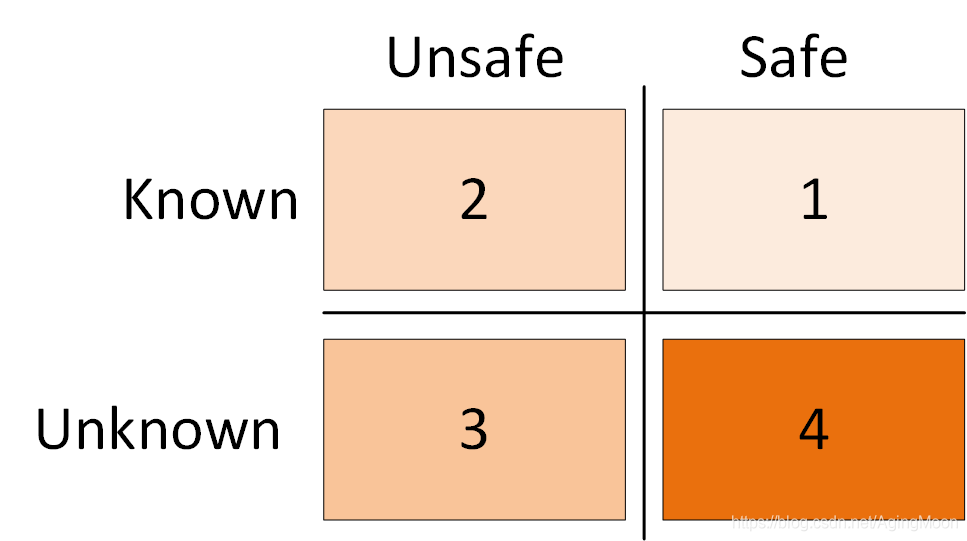
Area1:known safe scenarios 已知安全场景
Area2:known unsafe scenarios 已知非安全场景
Area3:unknown unsafe scenarios 未知的非安全场景
Area4:unknown safe scenarios 未知的安全场景
其中SOTIF则主要针对Area2 和Area3对症下药。
3、SOTIF实施过程

4、SO21448概要说明
4.1 功能和系统规范
定义系统架构,描述系统的功能,确定系统的边界,此处类似于ISO26262中 相关项的定义。包括系统对外功能的交互的描述,系统内部的描述,尤其涉及到HMI,传感器-算法-执行器等相关描述,用于启动SOTIF。
4.2 识别和评估SOTIF产生的危害
识别危害场景,识别场景的触发条件,确定验收条件。此处主要进行由于功能受限引起的危害事件,分析危害事件的严重度和可控度,确定验证和确认标准。
4.3 识别和评估触发事件
根据上文识别的危害事件,识别触发潜在危害的事件,此处主要是找出触发危害事件的原因。
4.4 修改功能减小SOTIF风险
设计相应的措施,分配到系统功能,以减轻SOTIF风险,进一步评估所采取的的措施,对预期功能的影响。
一般改善措施包括,系统性能提升,如选用性能更好的传感器;限制场景的功能使用,如识别到车道线不清晰-大雨天气等,禁止使用自动驾驶功能或者限制使用某些自动驾驶功能;降低系统和误用,如设计更好的交互或HMI。
4.5 确定验证和确认措施
识别危害事件所在的区域(Area2/Area3),选取SOTIF推荐的验证或确认策略,这里核心是识别出相应的test case,并确定哪些适应于Area2,哪些适应于Area3.
4.6 SOTIF验证
对系统的传感器-算法-执行器等,进行重复覆盖测试验证,以证明修改的系统和组件,符合预期的功能,同时已知不安全(Area2)场景下,功能符合预期(危害风险足够小)。
4.7 SOTIF确认
对系统的传感器-算法-执行器等,进行实际场景验证,以证明修改后的系统或组件,符合预期功能,在未知不安全(Area3)场景下,功能符合预期(证明实际场景风险足够低)。
4.8 SOTIF发布方法与准则
主要是评估残余风险是否可接受,是否符合发布准则。
5、SOTIF场景搜索
SOTIF和ISO26262功能安全一样,也是定义了一套方法论,而SOTIF这套方法论最关键的是,尽可能识别出相应的场景-对应措施-以及验证策略。本文结合自身对行业理解,简要谈谈如何去搜索SOTIF场景。
主要将场景分为两个大类,分别为系统的功能限制,以及系统的预期合理误用。
1、针对系统性能限制
a.列出系统所有的功能,并根据功能进一步细分传感器-算法-处理器-执行器,一步一步细分到组件。
b.罗列出系统各个功能的限制,这里需要按照一定的规则,罗列场景,并结合场景,找出功能边界值,极限值等。如考虑道路结构-天气状况-功能逻辑场景等,罗列传感器的极限值,算法的准确性,执行器相应的精确性等。这里场景应将性能限制Mapping到一张表,并评估组合在一起的可能性,将不可能出现的情况可以排除掉。此处可以借鉴HARA分析方法。
2、针对系统可预期误用
a.首先识别出干系人(Stakeholders)(如驾驶员-乘客等)
b.采用引导词识别误用原因
过程 引导词
认知 不理解
错误识别
判断 错误判断
行动 失误(注意力不集中导致)
故意
不能(难以操作)
c.考虑驾驶员与系统之间的交互(如一些操作,警告,指示,车辆行为等)
d.考虑用例场景的环境,如道路条件-天气等
e.通过以上来组合生成误用场景表
6、SOTIF案例说明
以下针对SOTIF工作流案例进行说明(参考ISO21448)
工作流 案例(AEB,紧急制动)
系统功能规范 本功能使用雷达扫描前方障碍物距离,如果检测到近处的障碍物,AEB将会触发
SOTIF相关的危害识别和风险评估
交通场景:驾驶在交通繁忙地段
潜在危害:非预期的紧急刹车,可能导致后方车辆追尾
风险可接受? No!驾驶员无法控制该危害,危害取决于两车间的间距
识别和评估驱动事件 道路上有易拉罐-或雪糕筒等异物,雷达可能识别为潜在障碍物
识别到的驱动事件可接受? No!由于AEB导致的追尾事故必须减轻
修改功能以降低SOTIF风险 限制AEB的制动持续时间或制动力度
修改功能和系统规范 增加功能:限制刹车介入,以最小化减小或阻止由于非预期紧急刹车导致的伤害
识别驱动事件可接受? Yes!无需进一步改进
定义验证和确认策略 选择设计相关的测试用例,以应对AEB相关的已知或未知非安全场景
验证SOTIF 针对已知AEB场景,进行跟踪测试-仿真测试-以及耐久测试。
已知场景足够覆盖?
系统和组件表现符合预期?
Yes,认为所做措施,或相应场景概率足够低,风险可接受
确认SOTIF 选择测试用例,进行整车层级测试,长久测试进行统计
系统和组件在真实场景中不会造成不合理风险 Yes,长久测试参考GAMAB规则
发布SOTIF方法和准则
获得测试和验证的结果,证明残余风险可接受。
在汽车电子领域,已经有了ISO26262这样针对系统的功能安全的标准,为啥同在汽车领域的自动驾驶,需要SOTIF(ISO21448)这样的预期功能安全呢?原因是,在自动驾驶领域,在系统没有报故障的情况下,也有可能导致一些危害。因此针对E/E失效外导致的危害,SOTIF是汽车功能安全的一个补充。
简单来说,ISO26262针对:
E/E系统的失效
SOTIF针对以下两个场景:
系统或组件的性能受限,导致预期功能不可达
系统的可预期误用(misuse)/或直译为合理可预期误用
2、关键概念说明
2.1 SOTIF
Safety Of The Intended Functionality,即预期功能安全。
2.2 Misuse
误用,指的是不按照设计系统的要求,去使用系统,在SOTIF中,什么样的视为误用呢?
如ADAS系统提出明确的 通知警告,告知驾驶员/安全员需要做出相应的接管或反馈时,同时驾驶员也充分理解该 通知警告,但是驾驶员故意忽略,此类情况,可以视为误用;
当驾驶员/安全员,有意违反ADAS的设计,以某种形式去操作ADAS,此类情况,可视为误用。
这里需要对比一下,非误用场景:
驾驶员对ADAS系统、自动驾驶系统发出的通知或警告,感到困惑,则不是误用;
驾驶员私自修改ADAS、自动驾驶系统,则属于功能滥用。
大家可以思考一下,淘宝上买的帮人握住方向盘,骗系统的行为,属于什么?
2.3 Triggering Event
Triggering Event,驱动事件,指的是特定驾驶条件下,触发输入系统,可能导致危害事件。
直接拿标准的例子说明:如在高速路上,系统的AEB功能开启,此处误识别一个道路标志,导致车辆以-0.5g的减速度刹车5s。
这样的一个场景条件,就是所谓的驱动事件。
2.4 Validation
Validation,确认,指一系列增加系统符合预期功能的活动,这里主要和Verification进行区分说明,Verification主要针对Area2场景,Validation活动主要针对Area 3场景。其中verification 主要侧重于已知场景的测试,如边界测试-需求测试-注入测试-MIL-SIL-hil测试等。Validation,则注重于未知场景的测试,如随机测试用例测试-长时间测试-根据经验测试-分析最坏场景测试等。
2.5 Area
Area1:known safe scenarios 已知安全场景
Area2:known unsafe scenarios 已知非安全场景
Area3:unknown unsafe scenarios 未知的非安全场景
Area4:unknown safe scenarios 未知的安全场景
其中SOTIF则主要针对Area2 和Area3对症下药。
3、SOTIF实施过程
4、SO21448概要说明
4.1 功能和系统规范
定义系统架构,描述系统的功能,确定系统的边界,此处类似于ISO26262中 相关项的定义。包括系统对外功能的交互的描述,系统内部的描述,尤其涉及到HMI,传感器-算法-执行器等相关描述,用于启动SOTIF。
4.2 识别和评估SOTIF产生的危害
识别危害场景,识别场景的触发条件,确定验收条件。此处主要进行由于功能受限引起的危害事件,分析危害事件的严重度和可控度,确定验证和确认标准。
4.3 识别和评估触发事件
根据上文识别的危害事件,识别触发潜在危害的事件,此处主要是找出触发危害事件的原因。
4.4 修改功能减小SOTIF风险
设计相应的措施,分配到系统功能,以减轻SOTIF风险,进一步评估所采取的的措施,对预期功能的影响。
一般改善措施包括,系统性能提升,如选用性能更好的传感器;限制场景的功能使用,如识别到车道线不清晰-大雨天气等,禁止使用自动驾驶功能或者限制使用某些自动驾驶功能;降低系统和误用,如设计更好的交互或HMI。
4.5 确定验证和确认措施
识别危害事件所在的区域(Area2/Area3),选取SOTIF推荐的验证或确认策略,这里核心是识别出相应的test case,并确定哪些适应于Area2,哪些适应于Area3.
4.6 SOTIF验证
对系统的传感器-算法-执行器等,进行重复覆盖测试验证,以证明修改的系统和组件,符合预期的功能,同时已知不安全(Area2)场景下,功能符合预期(危害风险足够小)。
4.7 SOTIF确认
对系统的传感器-算法-执行器等,进行实际场景验证,以证明修改后的系统或组件,符合预期功能,在未知不安全(Area3)场景下,功能符合预期(证明实际场景风险足够低)。
4.8 SOTIF发布方法与准则
主要是评估残余风险是否可接受,是否符合发布准则。
5、SOTIF场景搜索
SOTIF和ISO26262功能安全一样,也是定义了一套方法论,而SOTIF这套方法论最关键的是,尽可能识别出相应的场景-对应措施-以及验证策略。本文结合自身对行业理解,简要谈谈如何去搜索SOTIF场景。
主要将场景分为两个大类,分别为系统的功能限制,以及系统的预期合理误用。
1、针对系统性能限制
a.列出系统所有的功能,并根据功能进一步细分传感器-算法-处理器-执行器,一步一步细分到组件。
b.罗列出系统各个功能的限制,这里需要按照一定的规则,罗列场景,并结合场景,找出功能边界值,极限值等。如考虑道路结构-天气状况-功能逻辑场景等,罗列传感器的极限值,算法的准确性,执行器相应的精确性等。这里场景应将性能限制Mapping到一张表,并评估组合在一起的可能性,将不可能出现的情况可以排除掉。此处可以借鉴HARA分析方法。
2、针对系统可预期误用
a.首先识别出干系人(Stakeholders)(如驾驶员-乘客等)
b.采用引导词识别误用原因
过程 引导词
认知 不理解
错误识别
判断 错误判断
行动 失误(注意力不集中导致)
故意
不能(难以操作)
c.考虑驾驶员与系统之间的交互(如一些操作,警告,指示,车辆行为等)
d.考虑用例场景的环境,如道路条件-天气等
e.通过以上来组合生成误用场景表
6、SOTIF案例说明
以下针对SOTIF工作流案例进行说明(参考ISO21448)
工作流 案例(AEB,紧急制动)
系统功能规范 本功能使用雷达扫描前方障碍物距离,如果检测到近处的障碍物,AEB将会触发
SOTIF相关的危害识别和风险评估
交通场景:驾驶在交通繁忙地段
潜在危害:非预期的紧急刹车,可能导致后方车辆追尾
风险可接受? No!驾驶员无法控制该危害,危害取决于两车间的间距
识别和评估驱动事件 道路上有易拉罐-或雪糕筒等异物,雷达可能识别为潜在障碍物
识别到的驱动事件可接受? No!由于AEB导致的追尾事故必须减轻
修改功能以降低SOTIF风险 限制AEB的制动持续时间或制动力度
修改功能和系统规范 增加功能:限制刹车介入,以最小化减小或阻止由于非预期紧急刹车导致的伤害
识别驱动事件可接受? Yes!无需进一步改进
定义验证和确认策略 选择设计相关的测试用例,以应对AEB相关的已知或未知非安全场景
验证SOTIF 针对已知AEB场景,进行跟踪测试-仿真测试-以及耐久测试。
已知场景足够覆盖?
系统和组件表现符合预期?
Yes,认为所做措施,或相应场景概率足够低,风险可接受
确认SOTIF 选择测试用例,进行整车层级测试,长久测试进行统计
系统和组件在真实场景中不会造成不合理风险 Yes,长久测试参考GAMAB规则
发布SOTIF方法和准则
获得测试和验证的结果,证明残余风险可接受。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
