




 广告
广告





















































利用车对车通信定位欺骗攻击车载GPS
2021-02-19 23:03:27· 来源:轩辕实验室

由于报告的攻击事件越来越多,GPS欺骗是一个受到越来越多关注的问题。许多关于检测GPS欺骗攻击存在的结果已经被报道。然而,目前对欺骗攻击者的定位研究还很少,
由于报告的攻击事件越来越多,GPS欺骗是一个受到越来越多关注的问题。许多关于检测GPS欺骗攻击存在的结果已经被报道。然而,目前对欺骗攻击者的定位研究还很少,而欺骗攻击者的定位是对抗GPS攻击的关键。在本文中,我们提出利用车辆对车辆的通信来检测和定位对车辆导航GPS的欺骗攻击。其关键思想是将大多数商业GPS接收机报道的多普勒频移测量结果关联起来。该方法不需要额外的专用设备,而且很容易部署在配备了车对车通信设备的现代车辆上。它能够定位固定欺骗器和移动欺骗器,例如,可以安装在车辆上。通过数值模拟和实验验证了该方法的有效性。
引用
全球定位系统(GPS)已成为从飞机到轮船再到汽车,甚至在行人电话上的各种运输系统的重要导航系统。此外,GPS还可以用于精确的时间获取,这对于电力系统,银行系统和证券交易所的运营至关重要。不幸的是,尽管GPS在现代社会中无处不在且至关重要,但由于多种原因,GPS也容易受到攻击。首先,商用GPS接收器无法使用来自GPS卫星的加密信号,而不得不依赖未加密的消息,这对于攻击者而言很容易复制。而且,由于GPS卫星与地面GPS接收器之间的距离很长,到达接收器的信号非常微弱。实际上,地球上接收到的GPS信号的功率低至10-16瓦。因此,攻击者可以轻松发送更强的信号并淹没真实信号。
GPS接收器主要有两种攻击类型:干扰和欺骗。干扰是两种形式中比较简单的一种,仅涉及通过GPS频率传输噪声以破坏合法信号。这样可以防止接收器计算其位置。幸运的是,干扰攻击通常很容易检测到,因为它们会导致接收者丢失锁,从而向接收者揭示它们的存在。另一方面,欺骗攻击是攻击者生成并发送虚假信号以欺骗GPS接收器的过程。由于攻击者可以迫使接收者相信它所在的位置与实际位置不同,因此欺骗可以使攻击者将受害者带离目标。
本文提出了通过将多辆车辆的多普勒测量值与车对车通信相联系的方法,将欺骗性攻击者定位在车辆GPS上。鉴于车对车通信无线电设备已经上市,并且商用GPS接收器具有测量输入信号频率的能力,因此该方法不需要专用硬件。数值模拟和硬件测试都被执行以确认所提出方法的有效性。
攻击者模型
本文考虑攻击者使用向天线发送欺骗信号。攻击者可以使用包括欺骗在内的任何类型的欺骗。在这种情况下,如果多个目标被欺骗,它们将锁定在相同的欺骗信号上,并基于欺骗信号,将计算出完全相同的位置。因此,如果网络中的多个车辆开始报告确切的相同位置,则表明存在欺骗攻击。一旦检测到欺骗,就可以开始尝试定位攻击者。
本文考虑了两种主要情况:固定攻击者和移动攻击者。请注意,大多数现有结果都考虑到了平稳的攻击者。我们还考虑了移动攻击者,攻击者可以将其发射器放置在例如移动车辆中。
在固定攻击者情况和移动攻击者情况下,都假定攻击者能够改变其发送伪造GPS信号的频率。为了传输有效的GPS信号,攻击者必须以标准卫星传输的几百赫兹(约1575.42 MHz)范围内的频率进行传输。但是,假定在此范围内,攻击者可以完全控制他们可以传输的频率,包括实时更改频率的能力。攻击者可以将所需的任何噪声添加到该范围内的频率。实际的GPS信号中也会有一些噪声,但是只要接收器仍然可以保持锁定,这种噪声就无关紧要了。
幸存者模型
本文考虑了位于不同车辆上的一组移动接收器。这些车辆在同一条道路上行驶,并且可以使用V2V通信互相通信,并具有5.85-5.925 GHz GHz频段的标准带宽。每辆车都可以记录输入的GPS信号的频率,这是大多数商用GPS接收器报告的。每辆车还完全了解其行驶的速度以及信号频率的连续测量之间的行驶距离。这是合理的,因为车辆可以从其里程表获取距离信息。我们不假定车辆知道其确切位置。
每辆车都使用标准的商用GPS接收器,该接收器报告输入的信号频率。现有的大多数商用GPS接收机都报告了此类测量。由于接收器时钟与真正的GPS时钟之间失去同步,因此这些测量可能会出错。我们将在计算中使用两次连续测量之间的相对差来避免此类错误。此外,每个接收器都需要与所有其他接收器进行时间同步。但是这将按照定义发生,因为所有接收器都将锁定在攻击者生成的同一信号上。
欺骗设备简述
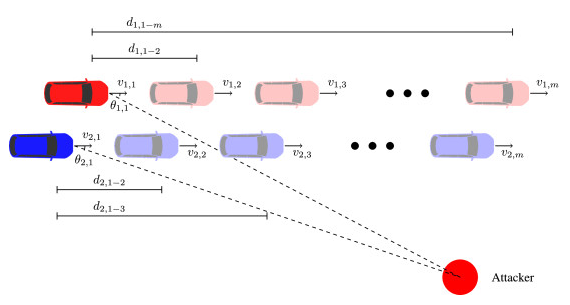
上图显示了我们的设置示意图,为了简化说明,我们考虑使用n = 2个车载GPS接收器。每个接收机在m个不同的位置进行频率测量,其中m是一个正整数。由于接收器之间的相对速度,接收器从接收者发送的信号中将经历一些多普勒频移。因此,一个给定的接收机i在每个点上测得的频率可以用下面的等式描述:

其中f是测得的频率,fs是喷洒器传输信号的频率,Vi是接收器相对于喷洒器的视线速度,c是光速,ϵ是接收器中的误差。mainly主要是由于接收器和GPS卫星之间的时钟差异引起的。由于它在短时间内几乎保持恒定,因此可以通过考虑不同样本之间的差异来消除它。例如,第一个测量和第j个测量之间的接收机i的频率差(其中j是介于2和n之间的某个整数)可以表示如下:

由于我们不假定欺骗信号在信号传输中使用的是恒定频率,因此我们使用fs,1和fs,j表示进行第一次和第j次测量时欺骗正在传输的相应频率。该公式可以简化如下:

接收者i在时间j相对于攻击者的视线速度是未知的,可以表示为:

其中vi,j是接收器i在时间j的速度,而θi,j是接收器速度与其相对于攻击者的方向之间的夹角,如上图所示。方程式(3)和(4)得出 :

此外,基于地层的几何形状,cos(θi,j)可以用在第一次采样时引用接收器1的变量表示,如下所述:

其中ri,1是进行第一次测量时从接收器i到攻击者的距离,而di,1-j是接收器i的第一次测量和第j次测量之间的距离。然后可以将该关系代入方程式(4),得到以下方程式:

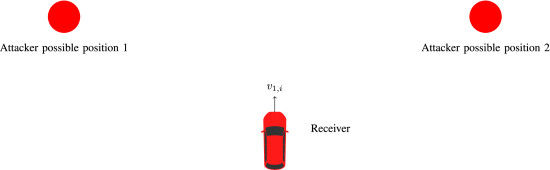
假设有n个接收器,每个接收器进行m次测量,那么我们可以构造n(m-1)个方程。在这些等式中,存在2n + m个未知数,即,每个接收器为θ,每个接收器为r,并且在每个时间点发送了fs。因此,当m大于6时,我们有n(m + 1)> 2n + m,因此可以解决未知数。使用相同的参数,我们可以知道三个接收器每个接收器只需要进行五次测量,而四个或更多接收器每个接收器只需要进行四次测量即可。但是,任何数量的接收器都可以对每个接收器进行其他测量,以潜在地提高准确性。这样,一旦解决了该方程式系统,就知道了攻击者相对于每个接收者的位置。注意,由于一个角度的余弦可以对应于两个不同的角度,因此有两种可能的解决方案。由于问题的对称性,与接收器左侧的踏板上的多普勒频移与接收器右侧的踏板上的多普勒频移没有区别,因此不可能将其缩小到仅一种解决方案 ,因此必须调查这两个位置以定位攻击者。
以上计算ri,1和θi,1从而获得踏板的位置的方法仅适用于无噪声的测量。鉴于测量始终受到噪声的影响,我们选择通过解决以下优化问题来估计踏板的位置:

其中Ei,j是car i在样本j处的误差,是测量到的多普勒频移和根据所选参数计算出的多普勒频移之间的差值:

基于实验的评价
为了在更现实的情况下评估此方法的有效性,还进行了硬件实验。不幸的是,由于法律禁止在露天进行欺骗,因此我们将防盗器和GPS接收器进行了硬连线,并使用了铝质屏蔽层来防止任何信号泄漏。为了模拟由于接收器和spoofer之间的相对运动引起的多普勒频移的影响,我们将计算出的多普勒频移硬编码为spoofer信号。
Ettus Research的USRP B210用作欺骗设备,可以同时在两个通道上传输信号。欺骗是使用gps-sdr-sim欺骗库[38]完成的,该库可在网上公开找到。该库可用于将欺骗信号传输到任何预定位置。在本实验中,它只是简单地以总频率偏移进行传输,以表示多普勒频移。
在每个测量点获得频率后,使用Matlab对其进行处理。
我们首先评估垂直距离(A)和接收器相对距离(D)对定位性能的影响,结果如图所示。在本实验中,所有车辆以20 m / s的速度行驶且平行距离为h 150米。
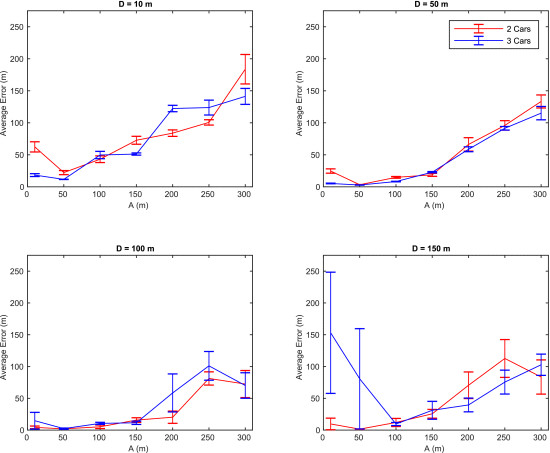
从图中可以看出,定位误差首先随着与踏板的距离(A)的增加而减小,然后随A的增加而增加。这与图中的数值模拟结果一致。
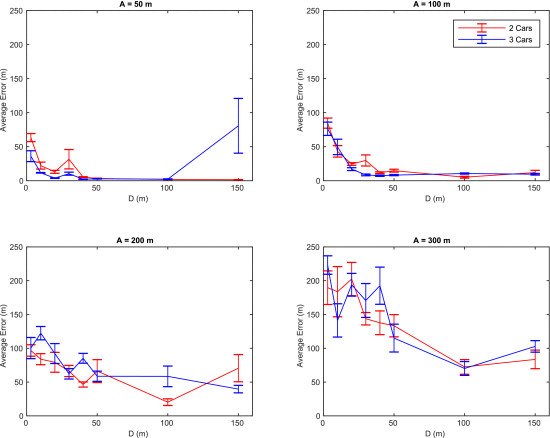
我们还评估了车辆之间的相对距离D对定位性能的影响。结果在图中给出。这演示了在接收器之间的距离变化中发现的模式。可以看出,总体趋势是相当一致的,而不管与攻击者的距离如何。更具体地说,定位误差首先随着相对距离的增加而减小然后增加。
总结
在本文中,我们建议使用协作车辆网络通过使用各自的多普勒频移来定位欺骗攻击者。据我们所知,这是首次将GPS定位器定位用于汽车导航GPS。使用硬件实验评估了结果的有效性。
这种方法可以通过几种方式推广。首先,在本文中,假设所有车辆均以完美的直线运动。这是合理的,因为车辆行驶方向在短采样时间内不会发生明显变化。在接收机不断采样的现实世界中,攻击者会以这种方式移动的采样周期很多。因此,只要接收器在多个周期内继续采样,定位就仍然可能。将来,我们计划考虑在弯道上行驶的车辆,这些弯道的转弯角可让单个车辆进入。在这种情况下,由于多普勒频移会随更多通用模式而变化,因此我们可能能够获得改进的定位性能。
此外,攻击者可以通过在交通拥挤的地区进行欺骗或使用定向天线来减少受其信号影响的汽车数量。但是,这仍不能完全排除检测和定位的可能性。他们也可以通过欺骗多个天线来规避这种方法,尽管对移动中的受害者这样做可能非常困难。
引用
全球定位系统(GPS)已成为从飞机到轮船再到汽车,甚至在行人电话上的各种运输系统的重要导航系统。此外,GPS还可以用于精确的时间获取,这对于电力系统,银行系统和证券交易所的运营至关重要。不幸的是,尽管GPS在现代社会中无处不在且至关重要,但由于多种原因,GPS也容易受到攻击。首先,商用GPS接收器无法使用来自GPS卫星的加密信号,而不得不依赖未加密的消息,这对于攻击者而言很容易复制。而且,由于GPS卫星与地面GPS接收器之间的距离很长,到达接收器的信号非常微弱。实际上,地球上接收到的GPS信号的功率低至10-16瓦。因此,攻击者可以轻松发送更强的信号并淹没真实信号。
GPS接收器主要有两种攻击类型:干扰和欺骗。干扰是两种形式中比较简单的一种,仅涉及通过GPS频率传输噪声以破坏合法信号。这样可以防止接收器计算其位置。幸运的是,干扰攻击通常很容易检测到,因为它们会导致接收者丢失锁,从而向接收者揭示它们的存在。另一方面,欺骗攻击是攻击者生成并发送虚假信号以欺骗GPS接收器的过程。由于攻击者可以迫使接收者相信它所在的位置与实际位置不同,因此欺骗可以使攻击者将受害者带离目标。
本文提出了通过将多辆车辆的多普勒测量值与车对车通信相联系的方法,将欺骗性攻击者定位在车辆GPS上。鉴于车对车通信无线电设备已经上市,并且商用GPS接收器具有测量输入信号频率的能力,因此该方法不需要专用硬件。数值模拟和硬件测试都被执行以确认所提出方法的有效性。
攻击者模型
本文考虑攻击者使用向天线发送欺骗信号。攻击者可以使用包括欺骗在内的任何类型的欺骗。在这种情况下,如果多个目标被欺骗,它们将锁定在相同的欺骗信号上,并基于欺骗信号,将计算出完全相同的位置。因此,如果网络中的多个车辆开始报告确切的相同位置,则表明存在欺骗攻击。一旦检测到欺骗,就可以开始尝试定位攻击者。
本文考虑了两种主要情况:固定攻击者和移动攻击者。请注意,大多数现有结果都考虑到了平稳的攻击者。我们还考虑了移动攻击者,攻击者可以将其发射器放置在例如移动车辆中。
在固定攻击者情况和移动攻击者情况下,都假定攻击者能够改变其发送伪造GPS信号的频率。为了传输有效的GPS信号,攻击者必须以标准卫星传输的几百赫兹(约1575.42 MHz)范围内的频率进行传输。但是,假定在此范围内,攻击者可以完全控制他们可以传输的频率,包括实时更改频率的能力。攻击者可以将所需的任何噪声添加到该范围内的频率。实际的GPS信号中也会有一些噪声,但是只要接收器仍然可以保持锁定,这种噪声就无关紧要了。
幸存者模型
本文考虑了位于不同车辆上的一组移动接收器。这些车辆在同一条道路上行驶,并且可以使用V2V通信互相通信,并具有5.85-5.925 GHz GHz频段的标准带宽。每辆车都可以记录输入的GPS信号的频率,这是大多数商用GPS接收器报告的。每辆车还完全了解其行驶的速度以及信号频率的连续测量之间的行驶距离。这是合理的,因为车辆可以从其里程表获取距离信息。我们不假定车辆知道其确切位置。
每辆车都使用标准的商用GPS接收器,该接收器报告输入的信号频率。现有的大多数商用GPS接收机都报告了此类测量。由于接收器时钟与真正的GPS时钟之间失去同步,因此这些测量可能会出错。我们将在计算中使用两次连续测量之间的相对差来避免此类错误。此外,每个接收器都需要与所有其他接收器进行时间同步。但是这将按照定义发生,因为所有接收器都将锁定在攻击者生成的同一信号上。
欺骗设备简述
上图显示了我们的设置示意图,为了简化说明,我们考虑使用n = 2个车载GPS接收器。每个接收机在m个不同的位置进行频率测量,其中m是一个正整数。由于接收器之间的相对速度,接收器从接收者发送的信号中将经历一些多普勒频移。因此,一个给定的接收机i在每个点上测得的频率可以用下面的等式描述:
其中f是测得的频率,fs是喷洒器传输信号的频率,Vi是接收器相对于喷洒器的视线速度,c是光速,ϵ是接收器中的误差。mainly主要是由于接收器和GPS卫星之间的时钟差异引起的。由于它在短时间内几乎保持恒定,因此可以通过考虑不同样本之间的差异来消除它。例如,第一个测量和第j个测量之间的接收机i的频率差(其中j是介于2和n之间的某个整数)可以表示如下:
由于我们不假定欺骗信号在信号传输中使用的是恒定频率,因此我们使用fs,1和fs,j表示进行第一次和第j次测量时欺骗正在传输的相应频率。该公式可以简化如下:
接收者i在时间j相对于攻击者的视线速度是未知的,可以表示为:
其中vi,j是接收器i在时间j的速度,而θi,j是接收器速度与其相对于攻击者的方向之间的夹角,如上图所示。方程式(3)和(4)得出 :
此外,基于地层的几何形状,cos(θi,j)可以用在第一次采样时引用接收器1的变量表示,如下所述:
其中ri,1是进行第一次测量时从接收器i到攻击者的距离,而di,1-j是接收器i的第一次测量和第j次测量之间的距离。然后可以将该关系代入方程式(4),得到以下方程式:
假设有n个接收器,每个接收器进行m次测量,那么我们可以构造n(m-1)个方程。在这些等式中,存在2n + m个未知数,即,每个接收器为θ,每个接收器为r,并且在每个时间点发送了fs。因此,当m大于6时,我们有n(m + 1)> 2n + m,因此可以解决未知数。使用相同的参数,我们可以知道三个接收器每个接收器只需要进行五次测量,而四个或更多接收器每个接收器只需要进行四次测量即可。但是,任何数量的接收器都可以对每个接收器进行其他测量,以潜在地提高准确性。这样,一旦解决了该方程式系统,就知道了攻击者相对于每个接收者的位置。注意,由于一个角度的余弦可以对应于两个不同的角度,因此有两种可能的解决方案。由于问题的对称性,与接收器左侧的踏板上的多普勒频移与接收器右侧的踏板上的多普勒频移没有区别,因此不可能将其缩小到仅一种解决方案 ,因此必须调查这两个位置以定位攻击者。
以上计算ri,1和θi,1从而获得踏板的位置的方法仅适用于无噪声的测量。鉴于测量始终受到噪声的影响,我们选择通过解决以下优化问题来估计踏板的位置:
其中Ei,j是car i在样本j处的误差,是测量到的多普勒频移和根据所选参数计算出的多普勒频移之间的差值:
基于实验的评价
为了在更现实的情况下评估此方法的有效性,还进行了硬件实验。不幸的是,由于法律禁止在露天进行欺骗,因此我们将防盗器和GPS接收器进行了硬连线,并使用了铝质屏蔽层来防止任何信号泄漏。为了模拟由于接收器和spoofer之间的相对运动引起的多普勒频移的影响,我们将计算出的多普勒频移硬编码为spoofer信号。
Ettus Research的USRP B210用作欺骗设备,可以同时在两个通道上传输信号。欺骗是使用gps-sdr-sim欺骗库[38]完成的,该库可在网上公开找到。该库可用于将欺骗信号传输到任何预定位置。在本实验中,它只是简单地以总频率偏移进行传输,以表示多普勒频移。
在每个测量点获得频率后,使用Matlab对其进行处理。
我们首先评估垂直距离(A)和接收器相对距离(D)对定位性能的影响,结果如图所示。在本实验中,所有车辆以20 m / s的速度行驶且平行距离为h 150米。
从图中可以看出,定位误差首先随着与踏板的距离(A)的增加而减小,然后随A的增加而增加。这与图中的数值模拟结果一致。
我们还评估了车辆之间的相对距离D对定位性能的影响。结果在图中给出。这演示了在接收器之间的距离变化中发现的模式。可以看出,总体趋势是相当一致的,而不管与攻击者的距离如何。更具体地说,定位误差首先随着相对距离的增加而减小然后增加。
总结
在本文中,我们建议使用协作车辆网络通过使用各自的多普勒频移来定位欺骗攻击者。据我们所知,这是首次将GPS定位器定位用于汽车导航GPS。使用硬件实验评估了结果的有效性。
这种方法可以通过几种方式推广。首先,在本文中,假设所有车辆均以完美的直线运动。这是合理的,因为车辆行驶方向在短采样时间内不会发生明显变化。在接收机不断采样的现实世界中,攻击者会以这种方式移动的采样周期很多。因此,只要接收器在多个周期内继续采样,定位就仍然可能。将来,我们计划考虑在弯道上行驶的车辆,这些弯道的转弯角可让单个车辆进入。在这种情况下,由于多普勒频移会随更多通用模式而变化,因此我们可能能够获得改进的定位性能。
此外,攻击者可以通过在交通拥挤的地区进行欺骗或使用定向天线来减少受其信号影响的汽车数量。但是,这仍不能完全排除检测和定位的可能性。他们也可以通过欺骗多个天线来规避这种方法,尽管对移动中的受害者这样做可能非常困难。



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
