




 广告
广告





















































联合国《自动车道保持系统(ALKS)》法规(下)
2021-02-23 21:49:57· 来源:北京市高级别自动驾驶示范区 作者:示范区

附录2
制造商应提供自动车道保持系统的信息文件表格,以供审批
1. 系统描述:自动车道保持系统
6.1 安全操作–车辆制造商声明
6.2 软件架构概述(例如区块图)
6.3 确定实现系统逻辑的方法
6.4 概述“系统”中内置的主要设计规定,以便在发生故障、运行干扰以及超出ODD的计划/意外状况时,车辆可以安全运行并与其他道路使用者交互。
6.5 主要故障处理原则,应变退回(Fallback)策略,包括风险缓解策略(最低风险策略)。
6.6 驾驶员、车辆乘员和其他道路使用者之间的互动,包括警告信号和需要将控制权交给驾驶员的要求。
6.7制造商确认遵守本法规中另行规定的性能要求,包括目标和事件探测及反应(OEDR)、人机交互(HMI)、遵守交通规则,并确定该系统的设计方式不会对驾驶员、乘员和其他道路使用者造成不合理的风险。
附录3
1. 本文件阐明了如何推导、确定自动车道保持系统(ALKS)应避免碰撞的情况。ALKS应避免发生碰撞的情况由通用模拟程序确定,以及以下专注驾驶员行为模型和交通关键干扰场景中的相关参数。
3.3 为了确定自动车道保持系统(ALKS)应在哪些情况下避免发生碰撞,考虑到专注的驾驶员在使用ADAS时的行为模式,下表中“感知”、 “决策”和“反应”的行为模型因素应被用作ALKS性能模型。
图1 熟练的人类表现模型
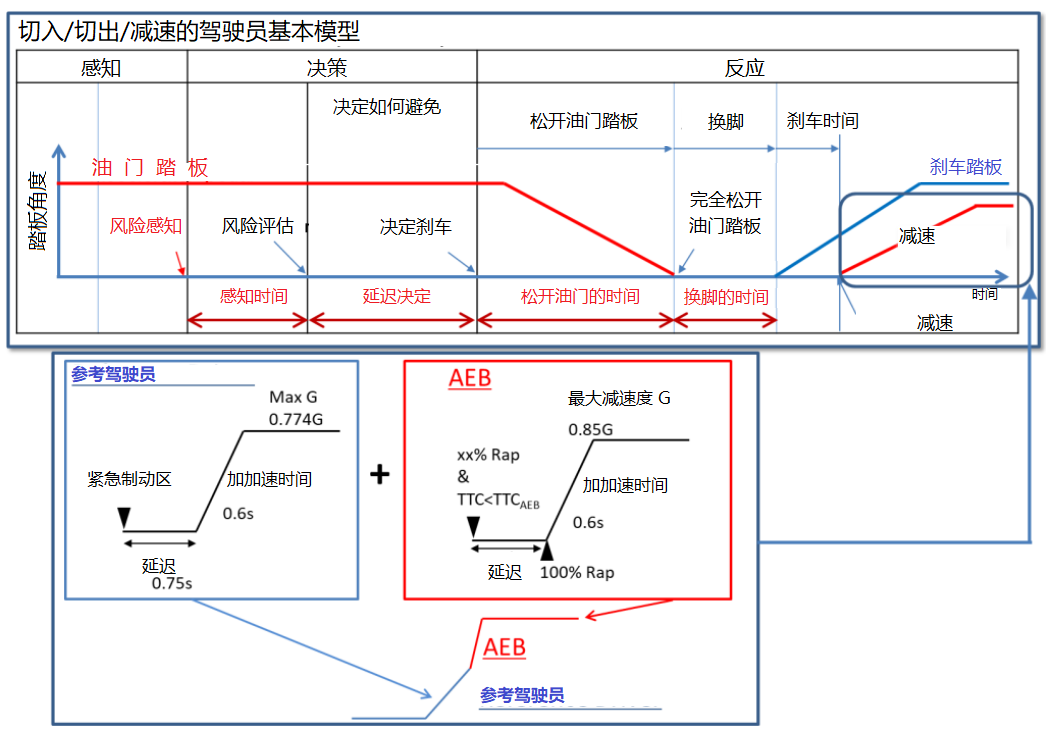
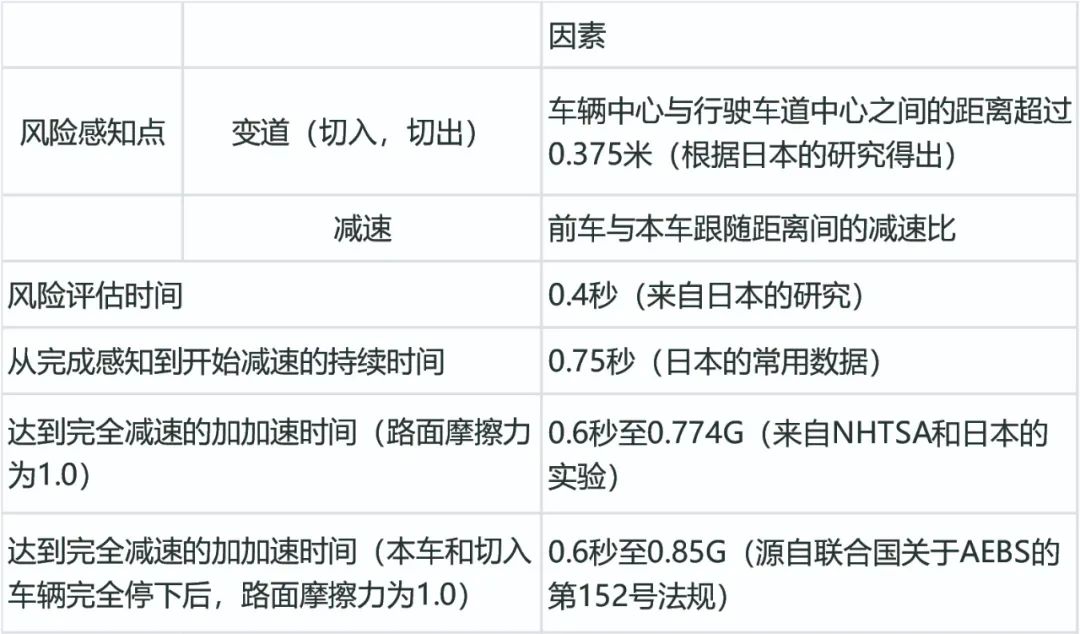
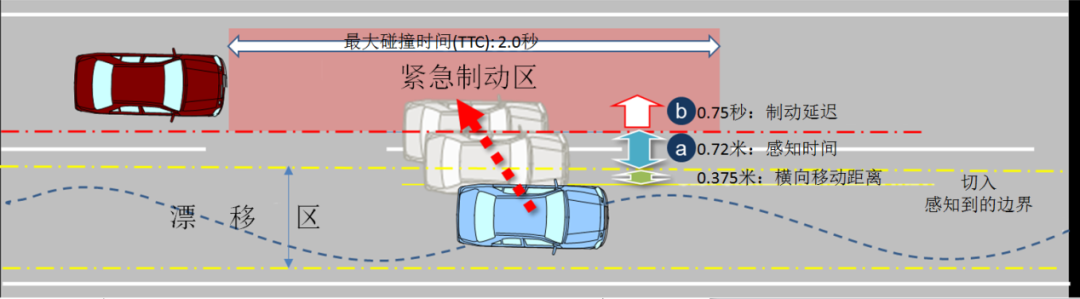
图2 切入场景的驾驶员模型
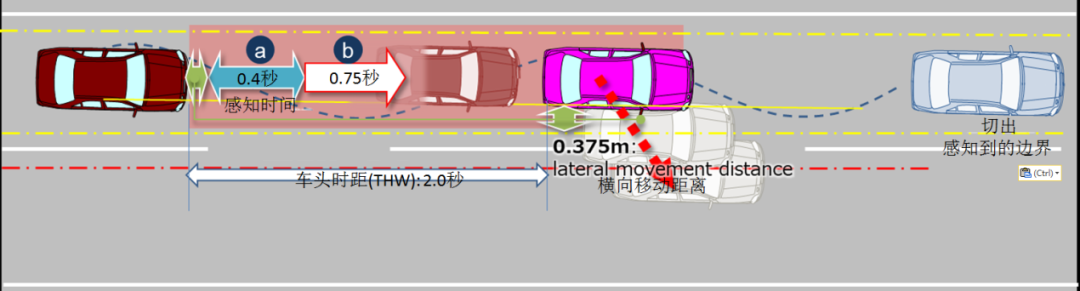
3.4.2. 针对切出场景:
通常,车辆在车道内的横向漂移距离为0.375米。
当车辆超过正常的横向漂移距离时(可能在实际变道之前)时,可感知的切出边界就会出现。风险感知时间[a]为0.4秒#,并且在前车超过切出边界阈值时开始。
2秒的时间被定为最大车头时距(THW),据此得出结论,存在纵向危险。
注:THW = 2.0秒是根据其他国家的法规和准则选择的。
3.4.3. 针对减速场景:
风险感知时间[a]为0.4秒。当前车超过减速阈值5m / s2时,风险感知时间[a]开始。

4. 参数
4.1 在描述第2.1部分中的交通关键场景的模型时,以下参数至关重要。
4.2 可以根据运行环境添加其他参数(例如,道路的摩擦率,道路曲率,光照状况)。






最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
