




 广告
广告





















































联合国《自动车道保持系统(ALKS)》法规(下)
2021-02-23 21:49:57· 来源:北京市高级别自动驾驶示范区 作者:示范区

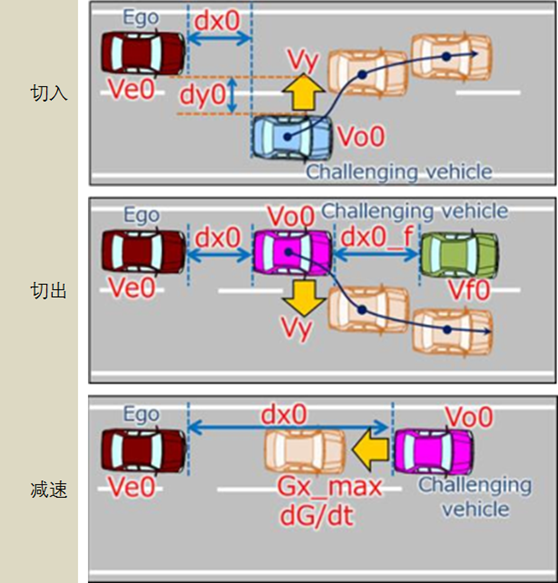
4.3 以下是三种场景下参数的直观表示
5. 参考
以下数据表是模拟的图形示例,这些模拟明确了ALKS应避免发生碰撞的情况,并考虑了在不大于最高允许ALKS车速时的每个参数组合。
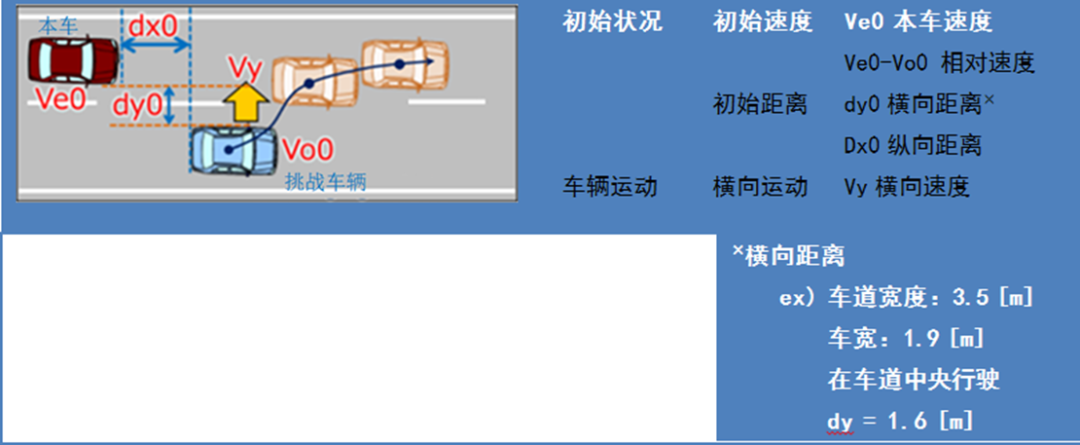
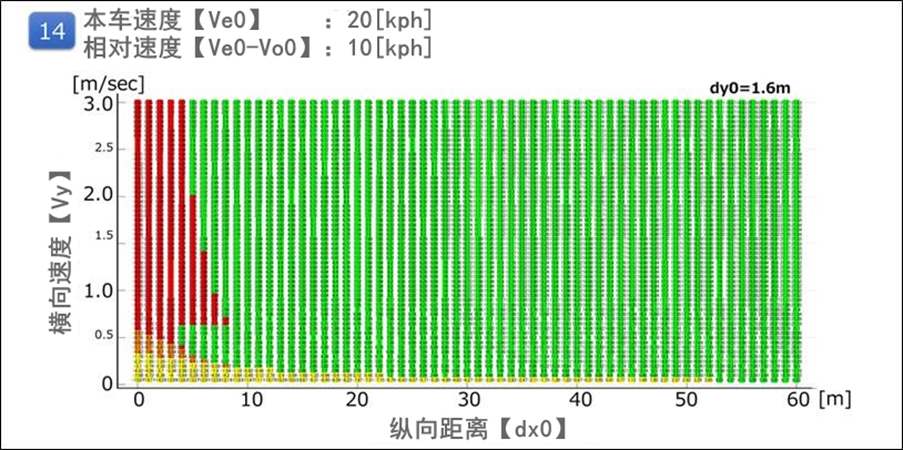
5.1.切入
(数据表图)
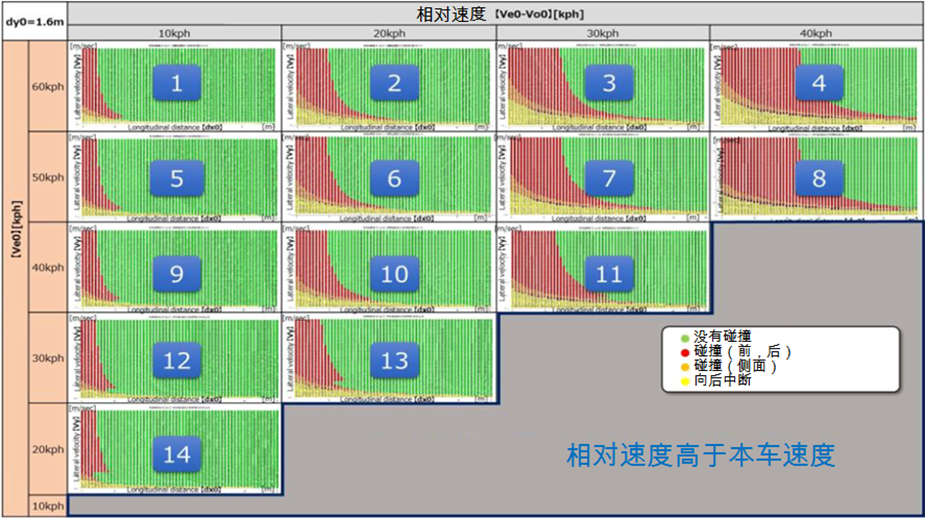
图8
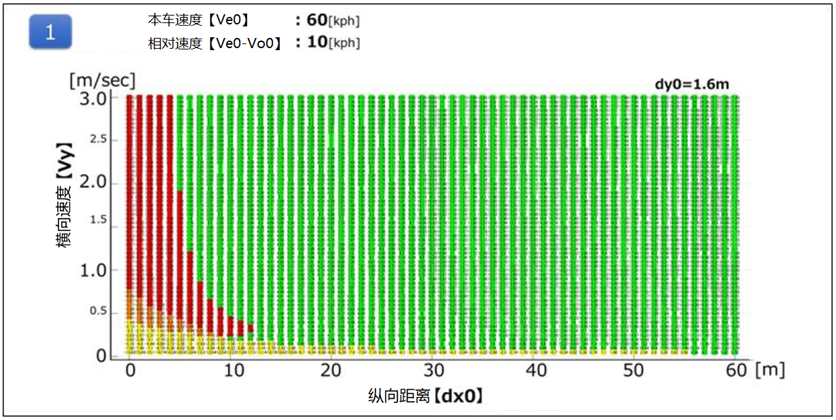
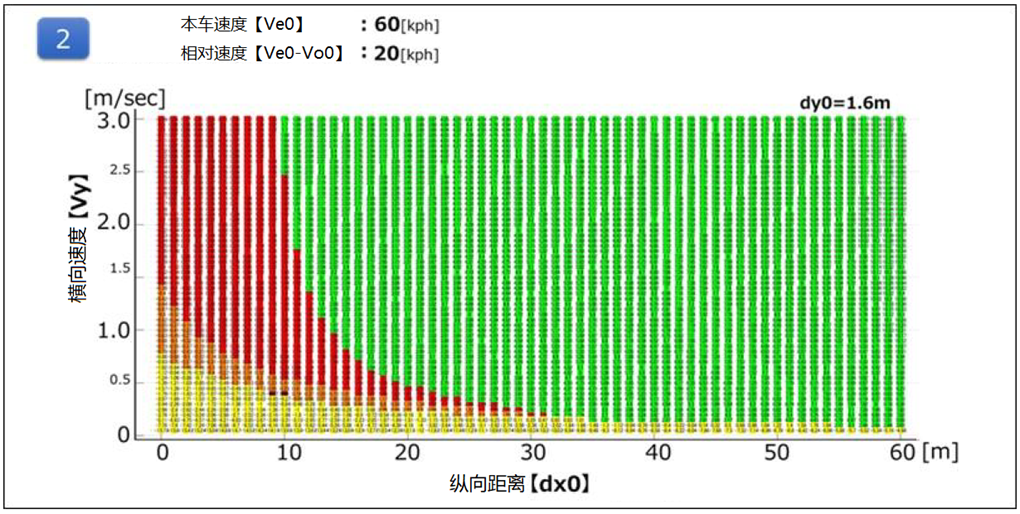
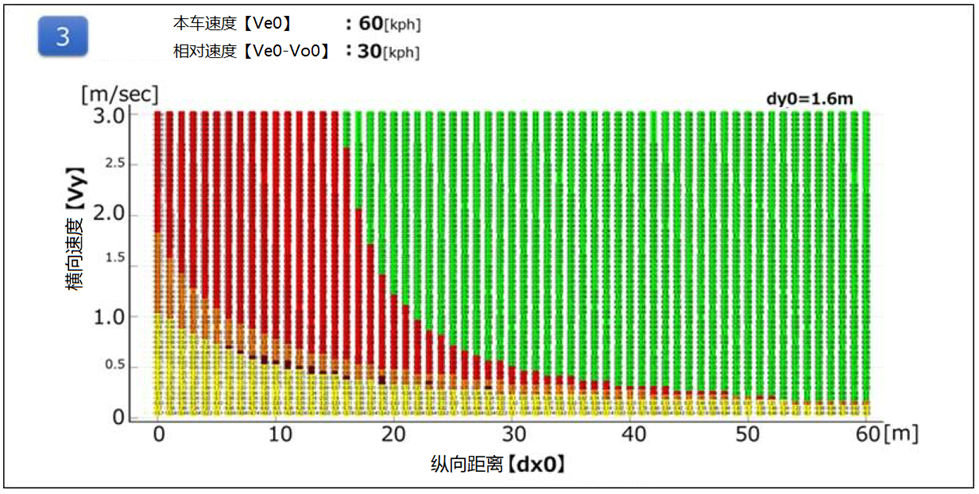
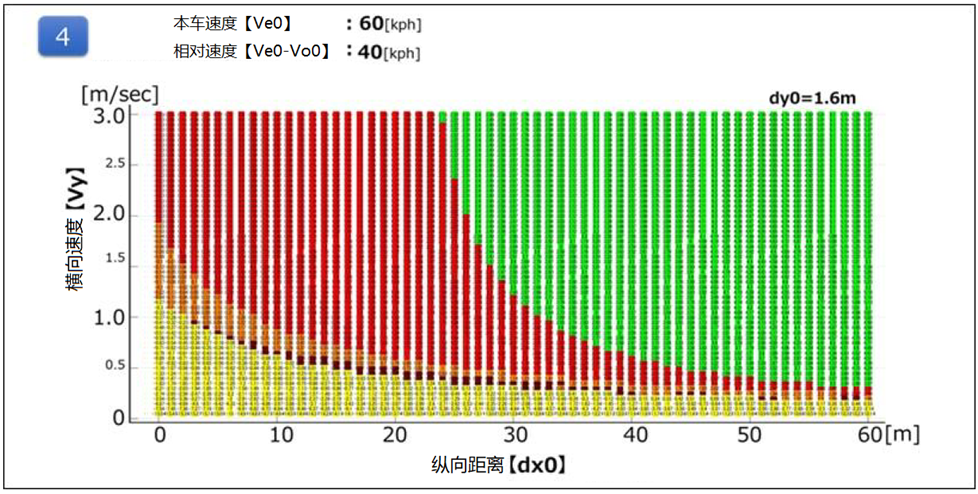
图9
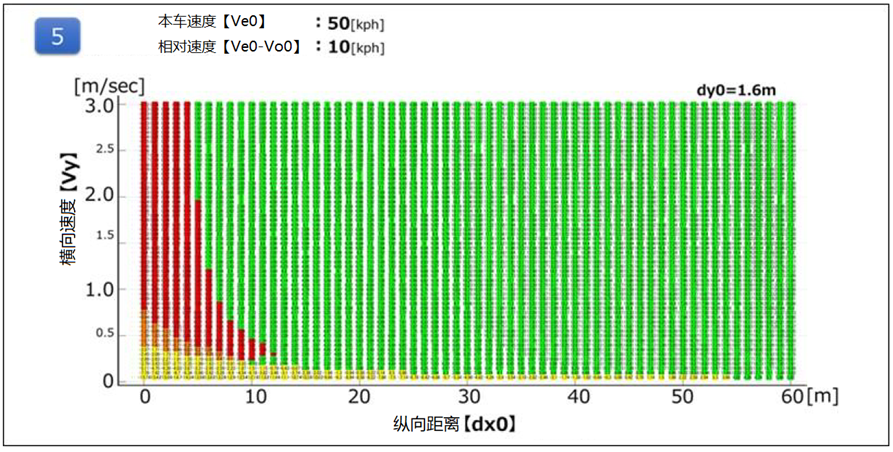
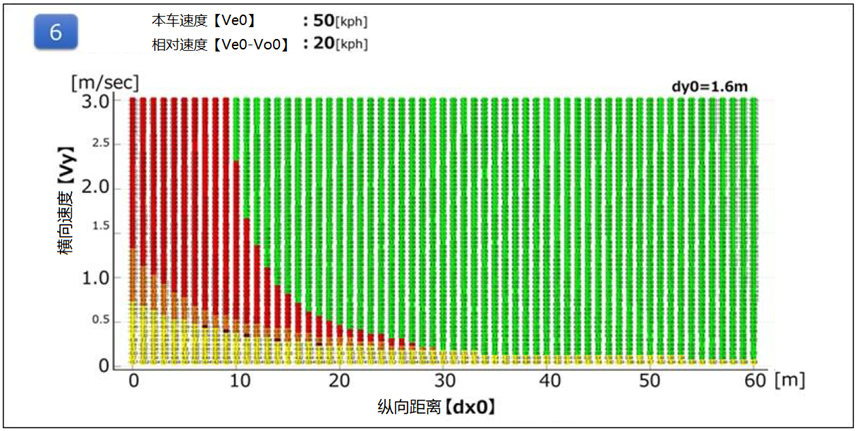
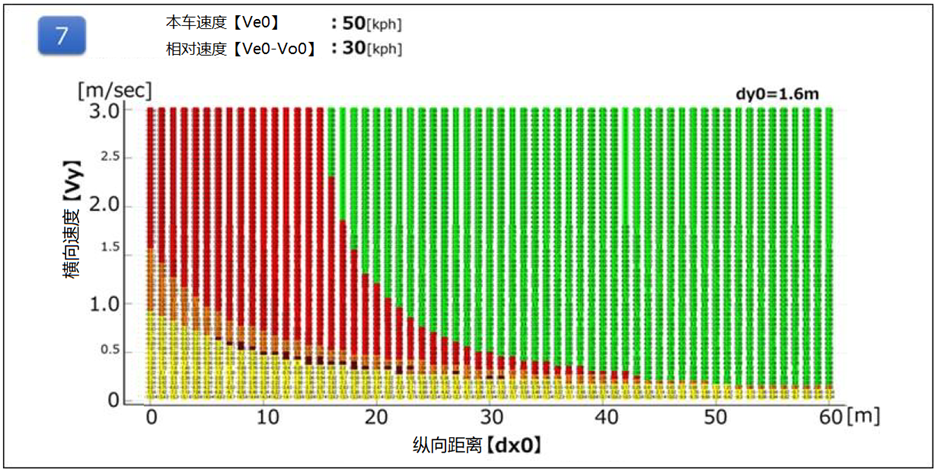
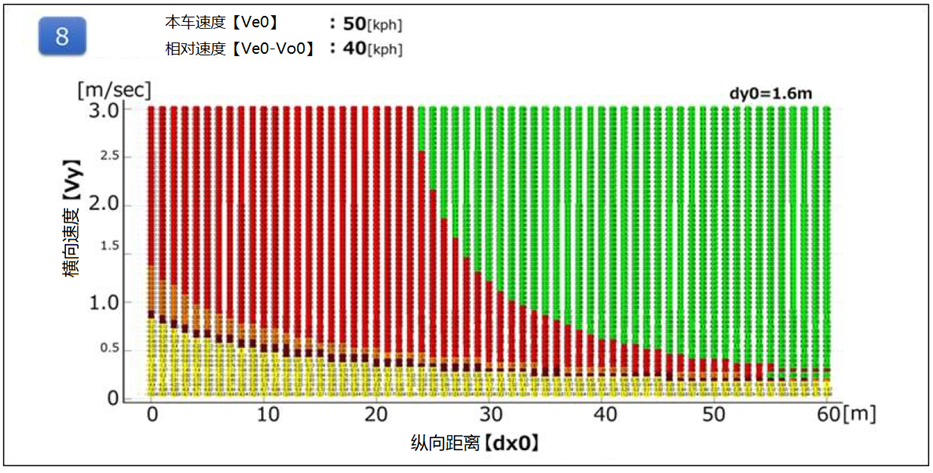
图10
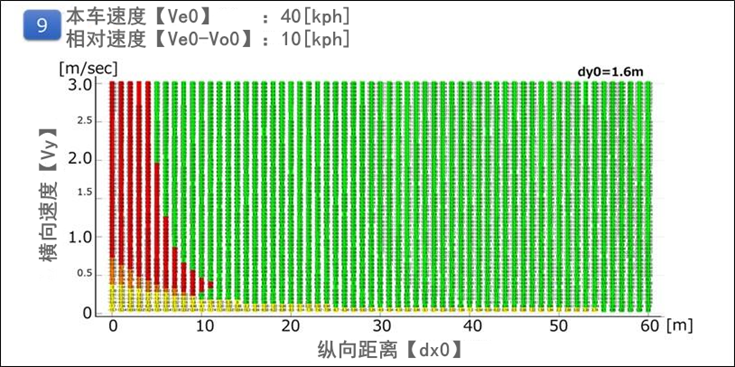
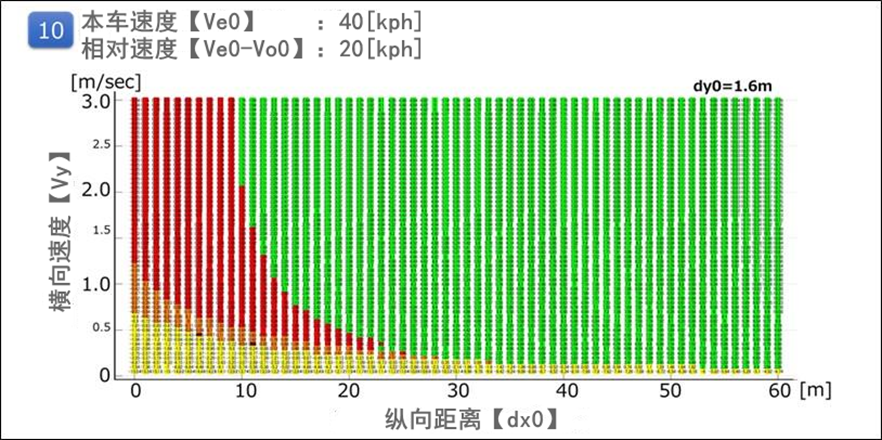
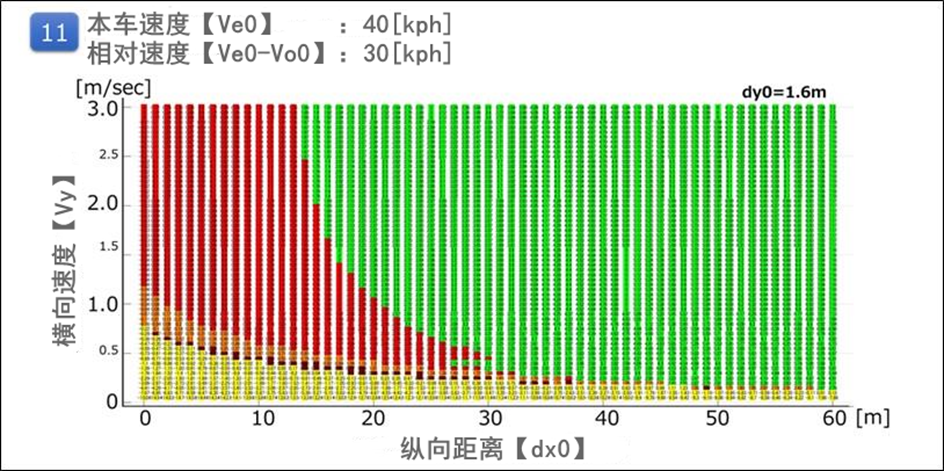
图11
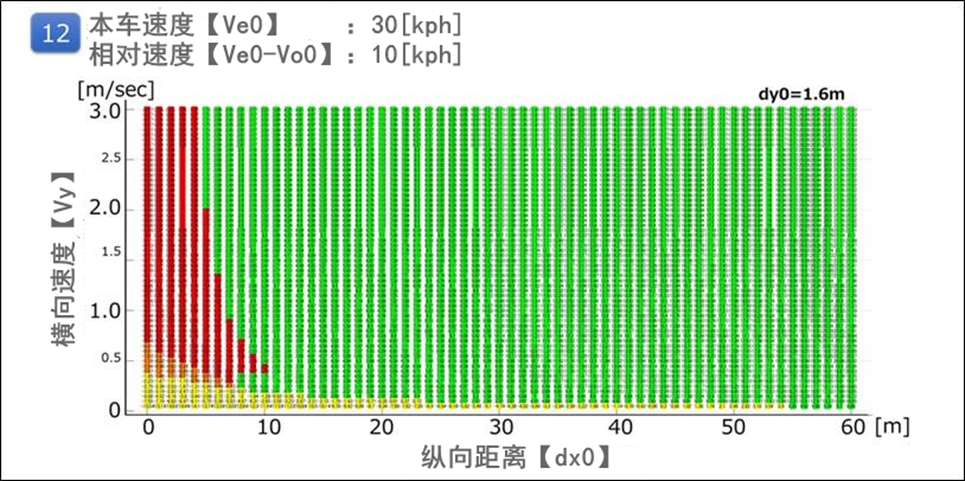
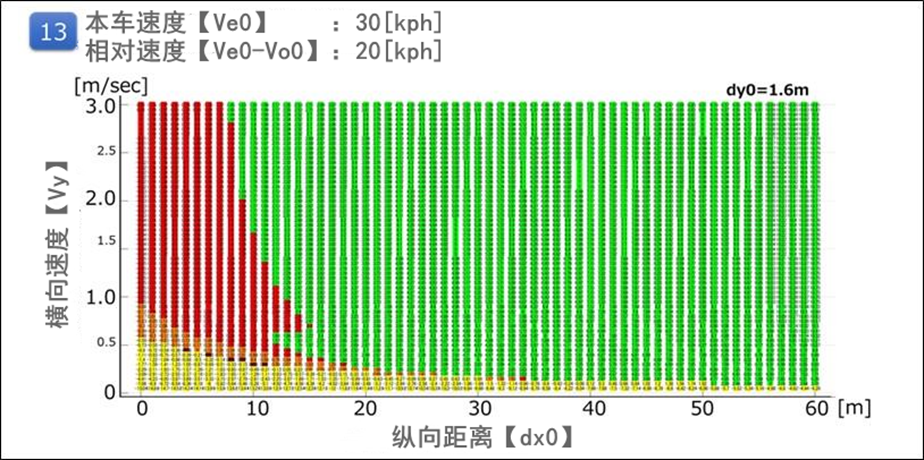
图12
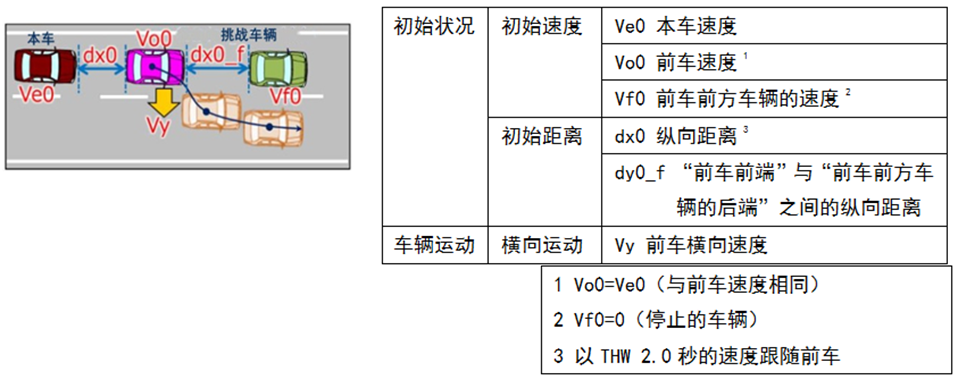
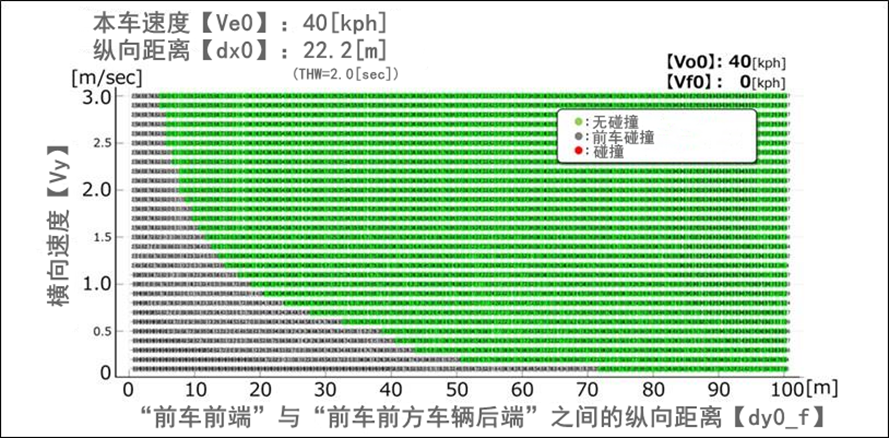
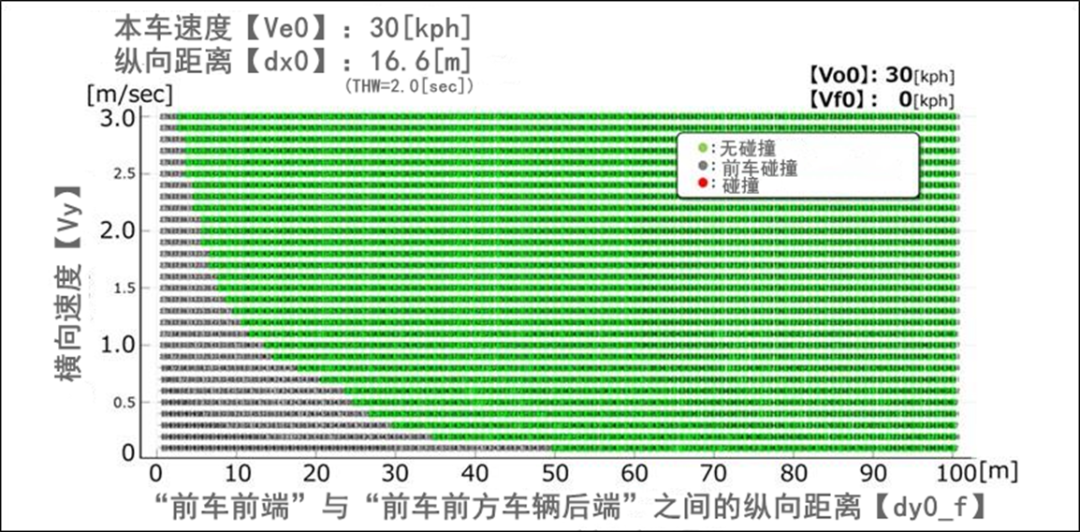
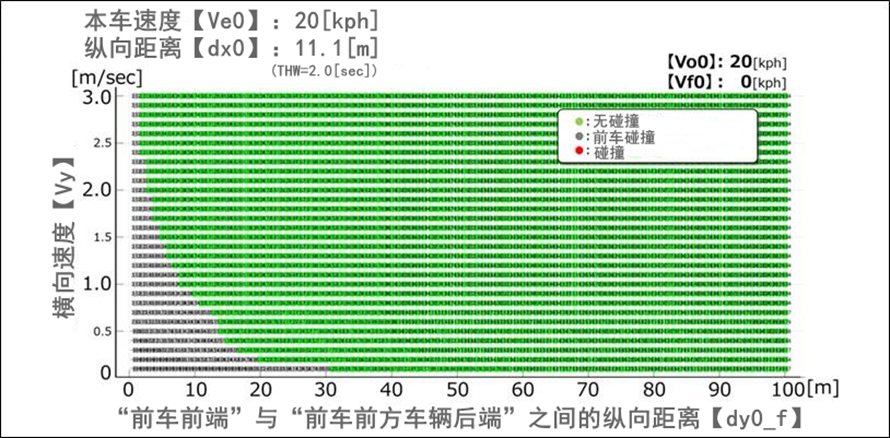
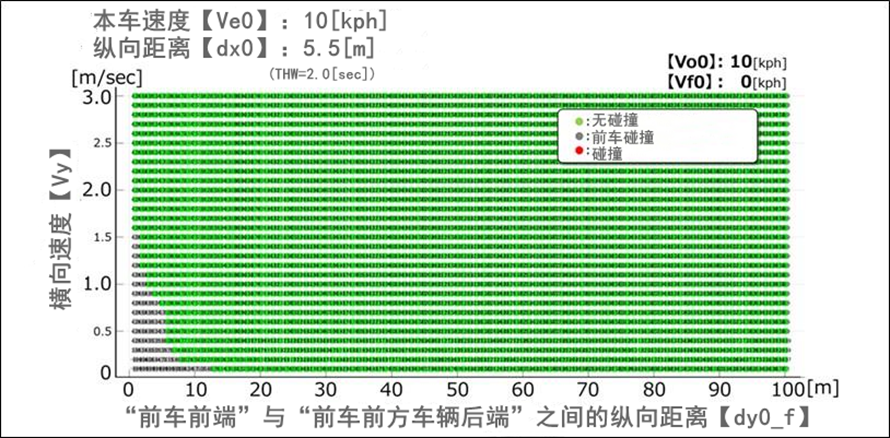
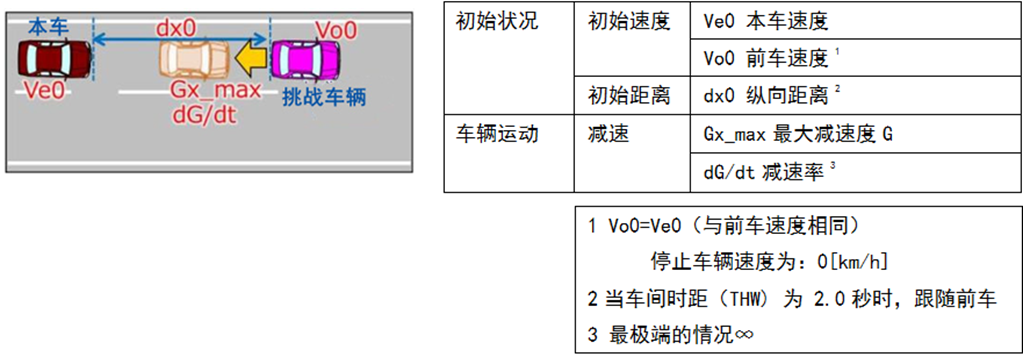
5.2 切出
当车间时距(THW) 为 2.0秒时,在以下行驶条件下, 可以避免让本车在前车切出前减速(停车)。
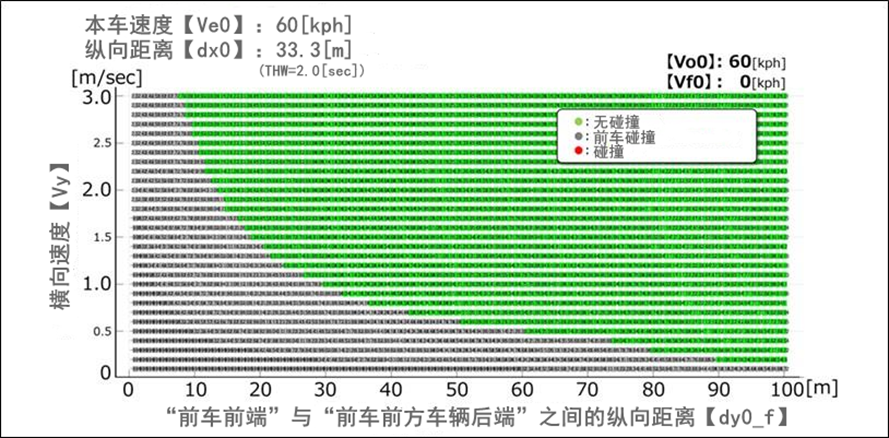
图12
(数据表图)
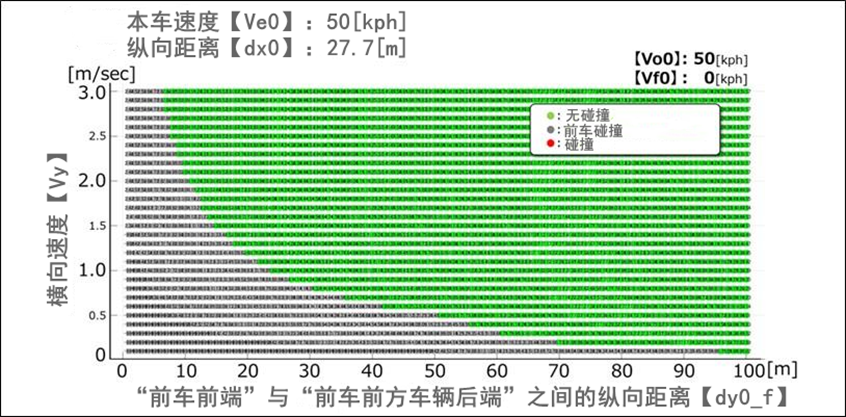
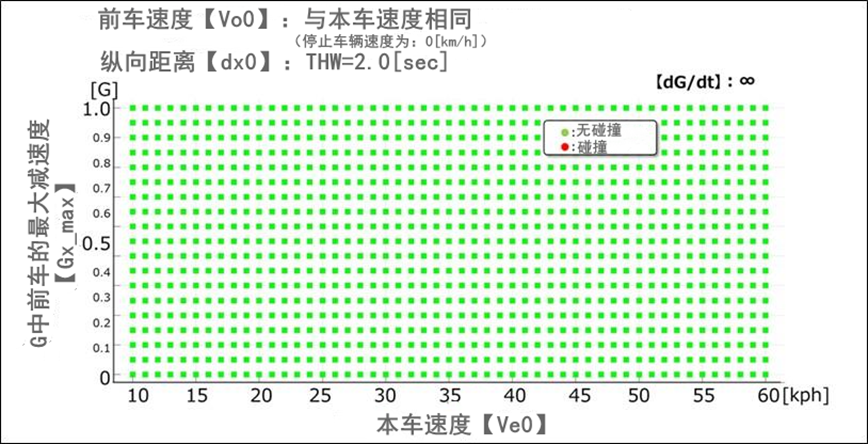
5.4 减速
当车间时距(THW) 为 2.0秒时,在跟随行驶的情况下,可以避免本车以-1.0G或更小的突然减速。
(数据表图)
附件五





最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
