




 广告
广告





















































基于负载电阻可调的电磁主动悬架减振研究
2021-02-26 17:44:31· 来源:天津汽车研究所 作者:天津汽车研究所

摘要为提高轮边驱动电动汽车动力学性能和馈能特性,针对一种12 槽14极的径向充磁式圆筒型馈能电磁悬架直线作动器,使用有限元分析法验证了所推导的感应电动势、
摘要
为提高轮边驱动电动汽车动力学性能和馈能特性,针对一种12 槽14极的径向充磁式圆筒型馈能电磁悬架直线作动器,使用有限元分析法验证了所推导的感应电动势、电磁力解析式的正确性;并建立电动轮系统电磁主动悬架馈能模型。在考虑非线性电磁力的前提下,设计了一种基于负载可调的馈能型电磁主动悬架协同控制式。仿真结果显示,与被动悬架相比,所提出的馈能型电磁主动悬架协同控制模式在提高轮边驱动电动汽车平顺性的同时实现能量的回收,有效地改善了汽车动力学性能。
针对轮边驱动系统带来的非簧载质量增加、电机性能直接影响车辆动力学性能等问题,兼具节能、响应速度快和控制精度高等优点的馈能型电磁主动悬架带来了新的解决方案。作为电磁主动悬架核心部件的作动器的研究必不可少,目前,针对电磁主动悬架作动器的研究主要集中在其结构优化上。在考虑端部效应、齿槽结构的影响因素下,对不同充磁方式的直线式作动器进行了较完善的理论分析。然而,如何从电磁主动悬架控制模式入手,从根本上改善车辆动力学性能的研究较少。基于以上问题,文章提出一种基于负载电阻可调的电磁主动悬架协调控制策略。仿真对比结果显示,所提出的协调控制策略不仅在一定程度上提高了车辆平顺性,还达到了能量回收的目的。
1 馈能型电磁主动悬架作动器结构设计
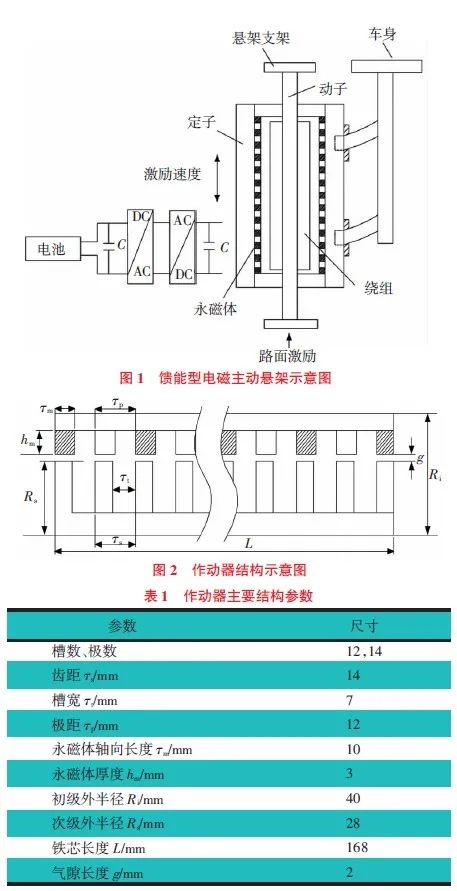
图1示出馈能型电磁主动悬架结构示意图,整个电磁主动悬架为直线式设计,作动器定子与车身簧上质量相连,动子与轮毂和轮胎等簧下质量相连,动子绕组通电时,定子与转子之间能实现纵向上的运动并产生电磁力。当处于被动工作模式时,动子绕组在定子磁场中产生感应电动势,通过调整电阻改变绕组中的电流给蓄电池充电,处于馈能模式。其中采用的12槽14级径向磁化的圆柱形直线作动器结构示意图,如图2所示,主要包括次级动子铁芯、绕组、永磁体和初级定子外壳几部分。作动器主要结构参数,如表1所示。
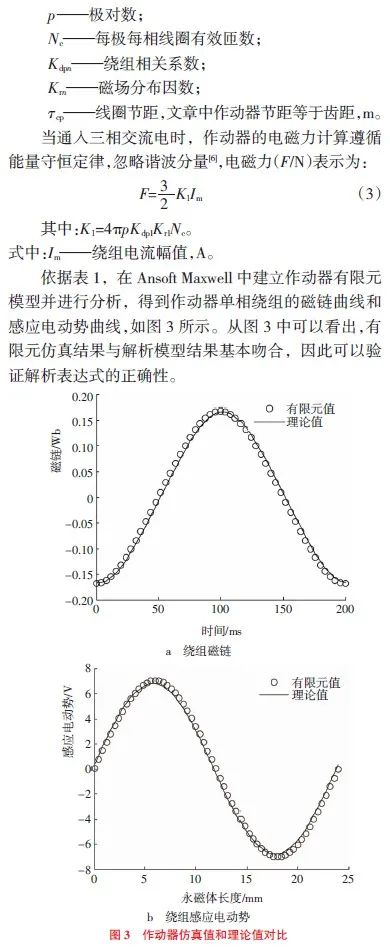
针对所采用的直线作动器,基于麦克斯韦电磁场理论,对作动器磁场分布进行分析。其中作动器的感应电动势是衡量作动器输出电磁力和馈能特性的重要因素。绕组感应电动势(E/V)可由式(1)表示: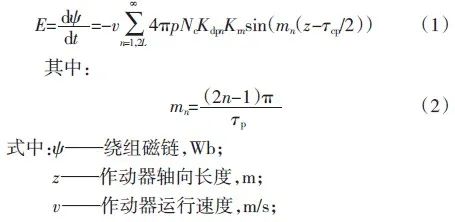
3 基于负载可调的馈能型电磁主动悬架协调控制
3.1 馈能型电磁主动悬架动力学模型
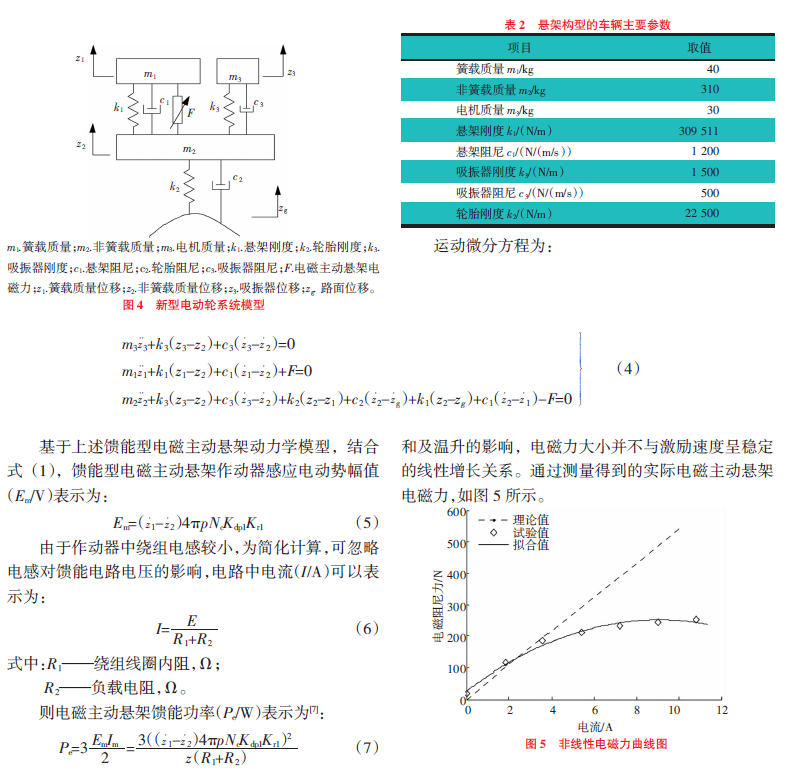
建立电动汽车馈能型主动悬架1/4动力学模型,如图4所示。主要具体参数取值,如表2所示。
由式(7)可知,馈能型电磁主动悬架馈能功率除与作动器极对数、线圈匝数等结构参数有关外,还受悬架相对运动速度和馈能电路负载电阻的影响,而在路面激励一定的条件下,即电磁主动悬架运动相对速度确定时,作动器的馈能功率只取决于负载电阻的大小,则可通过调节负载电阻的大小来调节悬架馈能功率,实现对馈能电磁主动悬架的馈能控制。结合式(3)和式(7)可以看出,电磁主动悬架作动器的电磁力也与悬架相对运动速度和电路负载电阻有关,在电路负载电阻一定的条件下,电磁力大小与悬架相对运动速度成正比关系,即悬架相对运动速度越大,电磁力也越大。但在实际中,作动器运行过程中受磁饱和及温升的影响,电磁力大小并不与激励速度呈稳定的线性增长关系。通过测量得到的实际电磁主动悬架电磁力,如图5所示。
从图5中可以看出,电磁主动悬架电磁力在实际运行过程中并非呈稳定的线性增长,在电流为0~4A的过程中,电磁力基本呈线性增加,其中试验测量值与理论值的偏差是由测试过程中的摩擦力造成的。在电流超过4A以后,电磁力的大小随着电流幅值的增加而逐渐饱和。通过对4~12A的电磁力进行二次项数据拟合,得到电磁力随电流变化曲线的函数为:
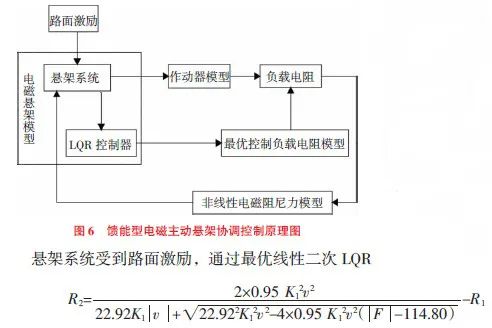
由电磁主动悬架馈能特性可知,在悬架不受外界激励影响的情况下,电磁主动悬架馈能特性仅与电路负载电阻有关,通过调节负载电阻的大小即可达到对电磁主动悬架的馈能控制,所以设计一种基于负载电阻可调的协调减振控制策略,其控制原理,如图6所示。
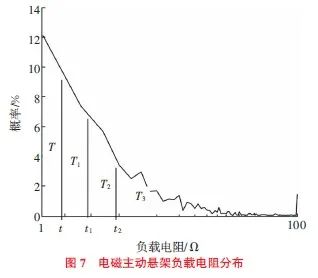
由于很难实现馈能控制模式下的负载电阻实时连续可调,因此文章设计了分档式负载电阻,对不同工况下不同负载电阻值工作概率进行仿真分析,电阻取值范围为[0,100],不同负载电阻取值概率分布,如图7所示,将整个电阻取值范围划分为5档,每个区间内选取平均电阻作为当前状态下电阻的取值,同时还需要对各档范围边界进行确定。
控制器得到最优控制力,悬架系统相对运行带动作动器运行,通过作动器模型可计算得到作动器感应电动势。由电磁主动悬架作动器非线性电磁力及悬架输出的最优控制力,可得到最优负载电阻控制模型,求出电路最优负载电阻,调节悬架最优控制力,进而达到协调控制的目标。
电磁主动悬架系统最优控制力随着悬架系统的工作状态而变化,当电磁主动悬架通入外部电流时,悬架处于主动模式,悬架所需最优控制力与作动器输出的电磁力方向相反,所消耗的电能全部来源于蓄电池。而当悬架所需最优控制力与作动器输出电磁力方向一致时,通过最优电阻控制模型调节的负载电阻达到最优电磁力的控制,悬架可将车辆振动能量转化为电能进行储存,进行能量回收,处于悬架馈能模式。最优控制负载电阻!2表示为:

对所建立的馈能型电磁主动悬架动力学模型进行仿真分析,汽车以100km/h的速度在B级路面的随机路面激励下行驶。图8示出主动模式和所提出的协同控制模式下的电磁主动悬架作动器输出的电磁作动力对比图,图9示出主动模式消耗的能量和半主动模式馈能的能量。从图8和图9中可以看出,所提出的基于负载电阻可调的馈能型电磁主动悬架协同控制比主动控制模型所输出的电磁作动力明显较大,在主动模式处于消耗电能的同时,协同控制能够实现一定的能量回收,降低车辆电能的消耗。
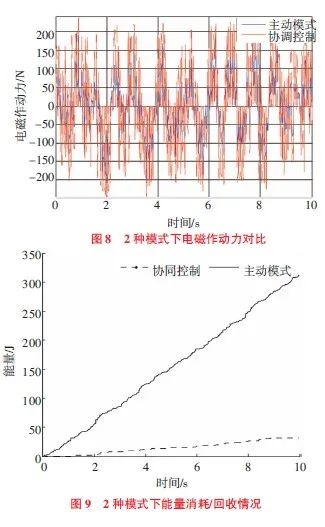
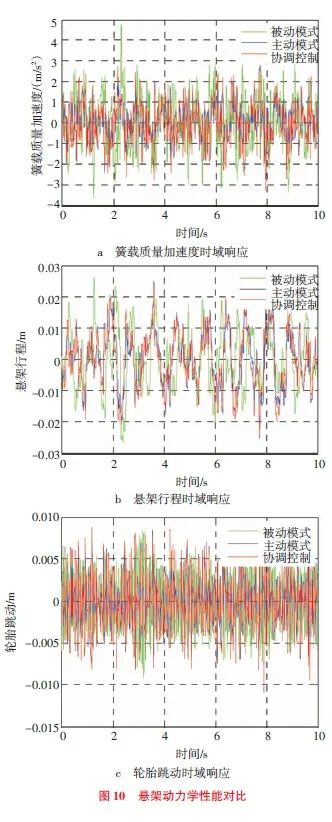
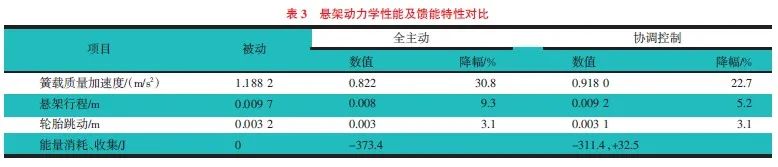
图10示出被动模式、全主动模式和协调控制模式下的悬架系统动力学性能对比图。表3示出3种模式控制下的均方根值的对比。由表3中可以看出,协调控制模式下的车辆簧载质量加速度、悬架动行程、车轮跳动均方根值分别由被动模式的1.1882m/s2,0.0097m,0.0032m下降到了0.9180m/s2,0.0092m,0.0031m,下降幅度分别达到22.7!,5.2!,3.1!,车辆动力学性能与全主动模式相差不大。而从能量消耗!回收来看,协同控制相比于全主动模式,所消耗的电能较小,同时还能实现一定量的能量回收。因此,所提出的馈能型电磁主动悬架协调控制模式不仅改善了车辆动力学性能,同时降低了对电动汽车电能的消耗,实现了能量的回收。
文章基于12槽14极的径向充磁式圆筒型馈能电磁悬架直线作动器,利用有限元分析验证了作动器绕组磁链和感应电动势解析模型的有效性,并推导出作动器电磁力解析式。设计了基于负载电阻分档可调的馈能型电磁悬架协调控制模式,对电磁主动悬架动力学模型进行仿真分析,仿真结果显示,所设计的协同控制使车辆质量振动加速度、悬架行程以及轮胎位移分别下降了22.7%,5.2%,3.1%,并且降低了电磁悬架对电动汽车电能的消耗,还实现了一定的能量回收。



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
