1.BCM的概述BCM(Body Control Module)车身控制模块,能够实现控制汽车车身用电器,比如整车灯具、雨刮、洗涤、门锁、电动窗、天窗、电动后视镜、遥控等。该系
1. BCM的概述
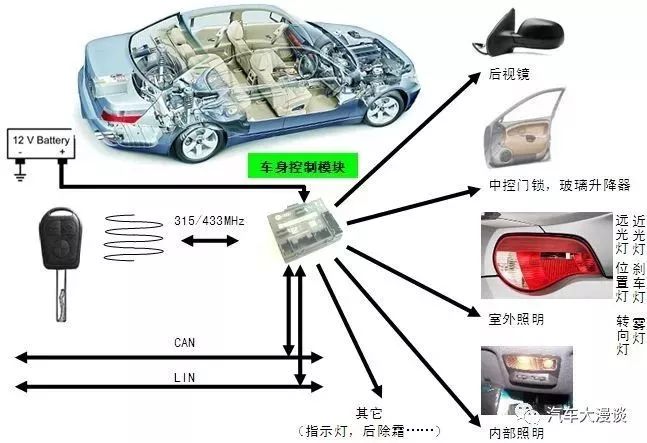
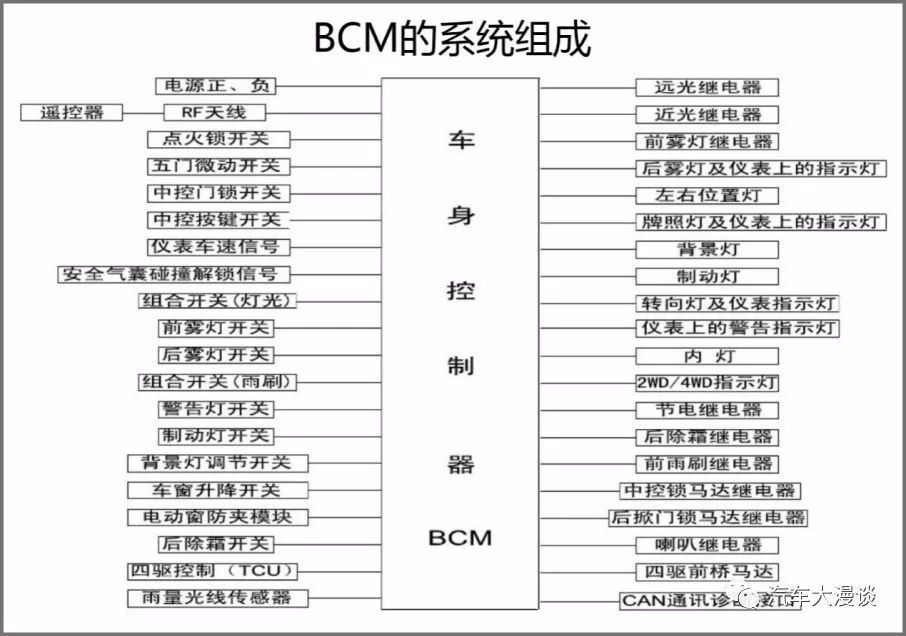
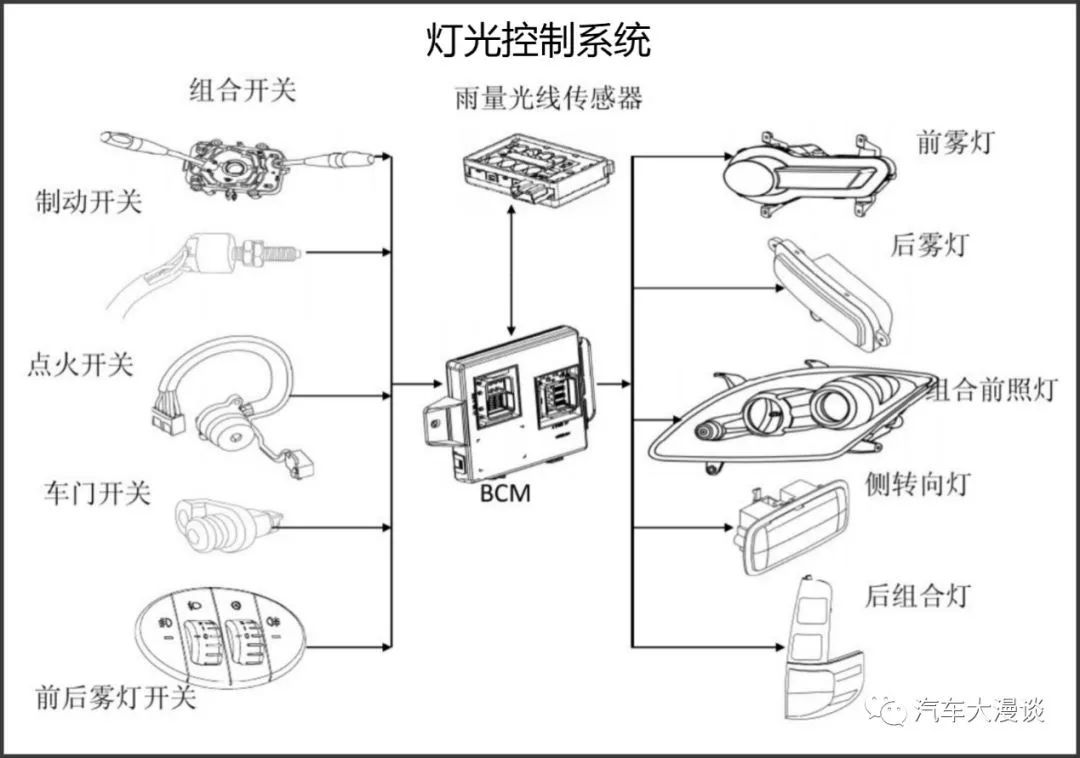
BCM(Body Control Module)车身控制模块,能够实现控制汽车车身用电器,比如整车灯具、雨刮、洗涤、门锁、电动窗、天窗、电动后视镜、遥控等。该系统还具有电源管理功能,高低电压保护,延时断电,系统休眠等功能。是汽车设计中不可或缺的重要组成部分。
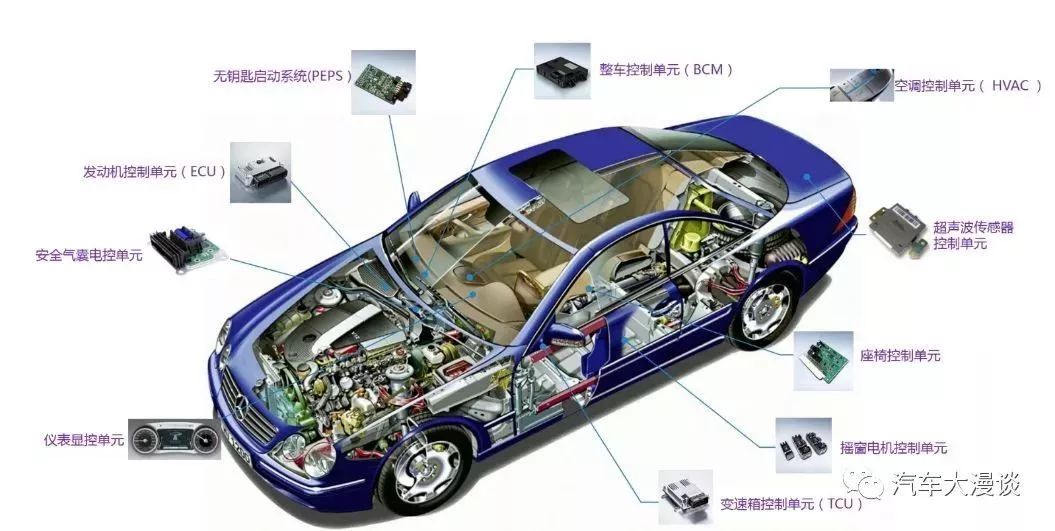
车身电子控制系统主要是用于增强汽车的安全、舒适和方便性的。还有用于和车外联结,以及协调整车各部分的电子控制功能,将大量计算机、传感器与交通管理服务系统联结在一起的综合显示系统、驾驶员信息系统、导航系统、计算机网络系统、状态监测与故障诊断系统等。在未来,各电子设备的功能越来越多,各种功能都需要通BCM来实现,使得BCM功能更加强大;各电子设备之间的信息共享越来越多,一个信息可同时供许多部件使用,要求BCM的数据通信功能越来越强;单一集中式BCM很难完成越来越庞大的功能,使得总线式、网络化BCM成为发展趋势。
1. 金属件表面应有良好的防护层,表面清洁,无锈蚀,无损伤;2. 塑料件表面平整、清洁、无划痕、无飞边、无缩孔、无塌坑、无变形、无裂纹等缺陷;3. 模块外观和安装尺寸为模块配合功能方面特殊性要求。
(1)点火开关打开时,允许电动窗工作。点火开关关闭后,经过1分钟电动窗的手动上升/下降功能被禁止。(2)手动上升:当按电动窗开关的上升键,则电动窗玻璃执行上升动作,松开上升键,则停止。(3)手动下降:当按电动窗开关的下降键,则电动窗玻璃执行下降动作,松开下降键,则停止。(4)司机门、副驾驶门、左后门、右后门、电动窗自动下降:按下电动窗玻璃开关下降键(按下时间<300ms),则电动窗玻璃执行自动下降动作,电动窗玻璃一直下降到底。
为了防止电机受损,四个电动窗玻璃升降器输出具有过电流保护及连续输出6S保护功能。当按下遥控器闭锁键时间小于3S,只执行中控锁闭锁,没有自动升窗动作;当按下遥控器闭锁键时间大于3S,执行中控锁闭锁和自动升窗动作;升窗顺序:首先左前升窗,左前窗到顶后升右前升窗,其次是左后升窗、右后升窗;遥控关窗时只允许一个玻璃升降器工作。如自动升窗期间按下开锁键,则自动升窗停止。
a. 点火开关打开时,允许电动窗工作。点火开关关闭后,经过1分钟电动窗的手动上升/下降功能被禁止。b. 手动上升:当按电动窗开关的上升键,则电动窗玻璃执行上升动作,松开上升键,则停止。c. 手动下降:当按电动窗开关的下降键,则电动窗玻璃执行下降动作,松开下降键,则停止。d. 司机门、副驾驶门、左后门、右后门、电动窗自动下降:按下电动窗玻璃开关下降键(按下时间<300ms),则电动窗玻璃执行自动下降动作,电动窗玻璃一直下降到底。
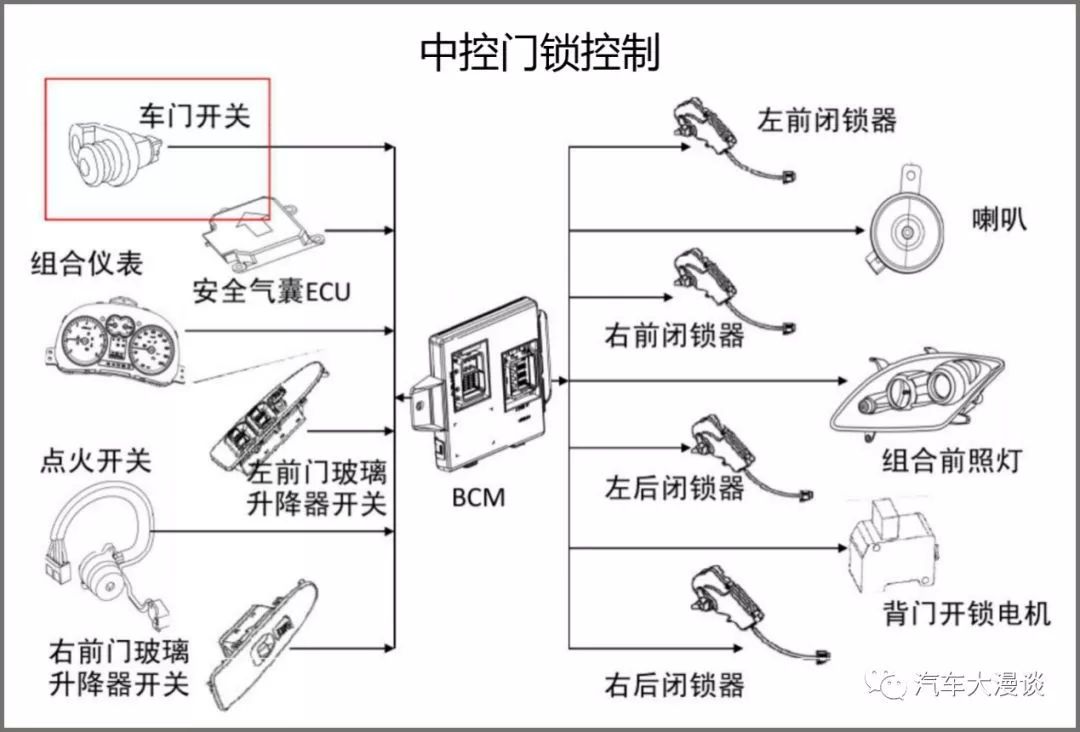
a. 操作驾驶“闭锁/开锁”按钮,如在闭锁状态下按开锁键,四个门锁进入开锁状态;在开锁状态下按闭锁键,四个车门进入闭锁状态。中控门开闭锁是300ms的输出。b. 当按下闭锁开关按键后,四个车门进入闭锁状态,同时后背箱开启开关按键禁止。当按下开锁开关按键后,四个车门进入开锁状态,同时后背箱开启开关按键有效。当按下遥控器闭锁按键后,四个车门进入闭锁状态,同时后背箱开启开关按键禁止。当按下遥控器开锁按键后,四个车门进入开锁状态,同时后背箱开启开关按键有效。
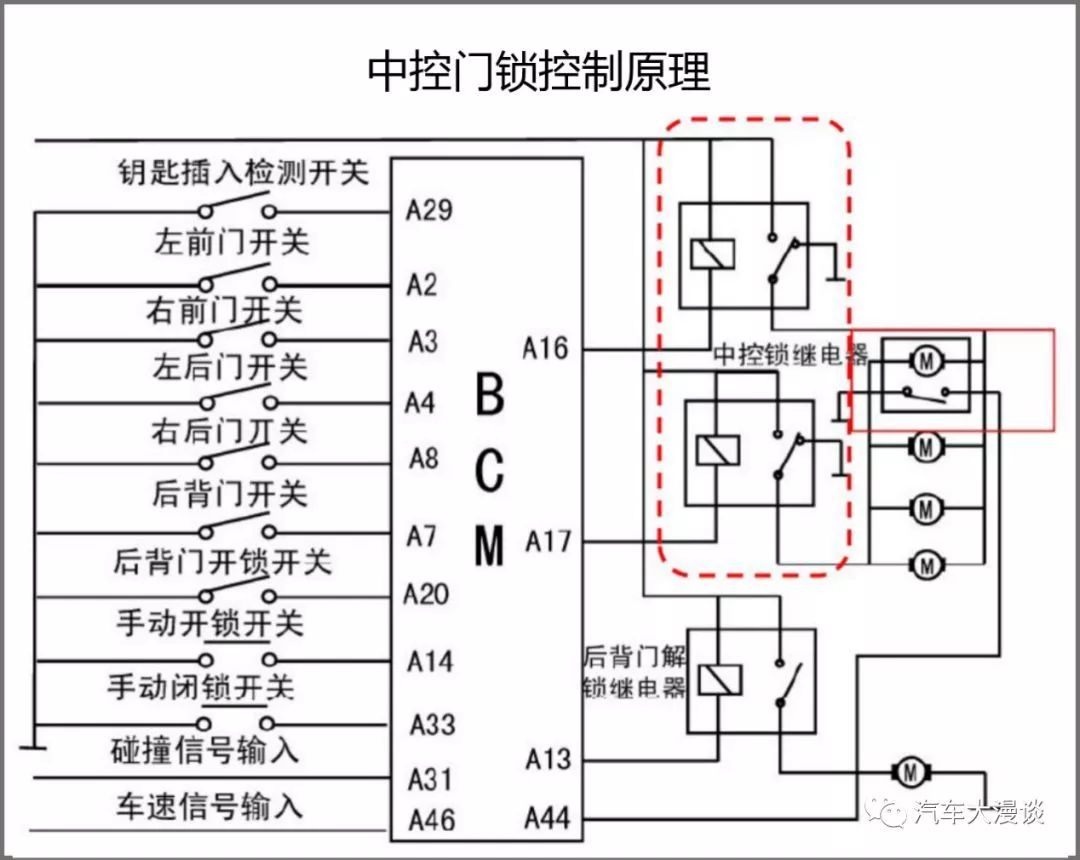
在10S内中央门锁连续开锁/闭锁超过8次,则中央门锁禁止动作15S,以保护中央门锁。中控门锁和电动窗玻璃升降器不得同时动作。两者发生冲突时,中央门锁优先动作,而电动窗玻璃升降器停止工作;待中央门锁动作结束,电动窗玻璃升降器继续前一个状态工作。
(1)在解防的条件下:按下后背箱开启开关按键后,后背箱自动执行开锁动作一次。同时后背箱指示灯亮,关闭后背箱后,指示灯熄灭。背门锁开锁是300ms的输出。(2)在设防的条件下:按下遥控器上的后背箱按键后,执行转向灯闪烁二次,并且BCM模块处于解防模式。(3)钥匙插入后,遥控器上的开锁键、闭锁键、后背箱按键失效。
a. 设防失败:当任一车门、后备箱打开时,且点火开关关闭时,按下遥控器闭锁,方向灯闪三下,同时报警喇叭叫三次。(报警喇叭周期是响50ms,停100ms)b. 设防成功:所有车门、后备箱关闭,且点火钥匙未插入时,按遥控器闭锁键,关中控锁,同时转向灯闪烁一次。如果在设防状态下系统被触发过(包括有:非法打开车门、后备门),则在遥控器开锁时系统退出设防状态,方向灯闪四下,同时报警喇叭叫四次。
a. 解防成功:在点火开关关闭时,按下遥控器开锁键,开中控锁,同时转向灯闪烁二次。b. 按下遥控器开锁键,开中控锁;如果点火开关、任一车门、后备箱信号没有被触发,在60秒内一直处于这种状态,则60秒后中控锁自动闭锁一次,并且系统进入设防状态。c. 当BCM设防后,按下遥控器后背箱按钮,只执行转向灯闪烁2次,并且BCM模块处于解防模式。d. 按下遥控器开锁键,开中控锁;在60S内,后背箱开启开关按键有效。
a. 按下遥控闭锁键,系统进入设防状态;如存在非法打开任一车门、后备门操作,控制器都会发出30秒的警报,同时左右转向灯闪烁30秒。如果报警信号未消失,按下遥控器开锁键,停止报警,中控锁解锁,进入解防模式。如果报警信号未消失,当钥匙插入后,停止报警,进入解防模式。
将任意车门打开,车内顶灯、门状态指示灯就会亮起,车门关闭顶灯、门状态指示灯熄灭。a. 点火开关IGN为“OFF”时,打开(正)驾驶室的门,则点火锁孔照明灯亮。关上(正)驾驶室的门,点火锁孔照明灯延时10s后熄灭。b. 当点火锁孔照明灯延时10s过程中,如果打开点火开关ON或者进入设防状态,点火锁孔照明灯立即熄灭。
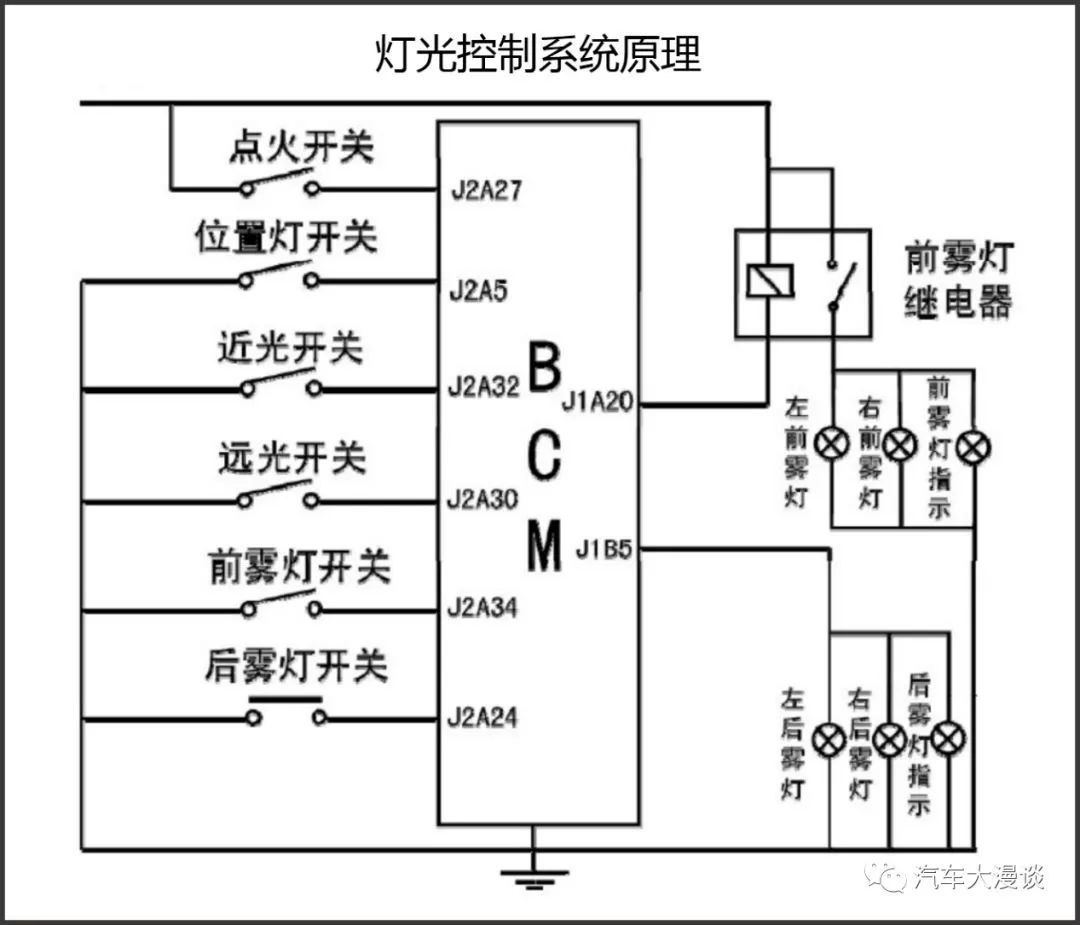
a. 点火开关打到ON档,后雾灯只有在小灯开关打开时的情况下才能打开,后雾灯能独立关闭。后雾灯开关按一次,后雾灯点亮,再按一次,后雾灯灭。b. 后雾灯亮时,关闭小灯开关,后雾灯熄灭。关闭点火开关IGN后,后雾灯熄灭。
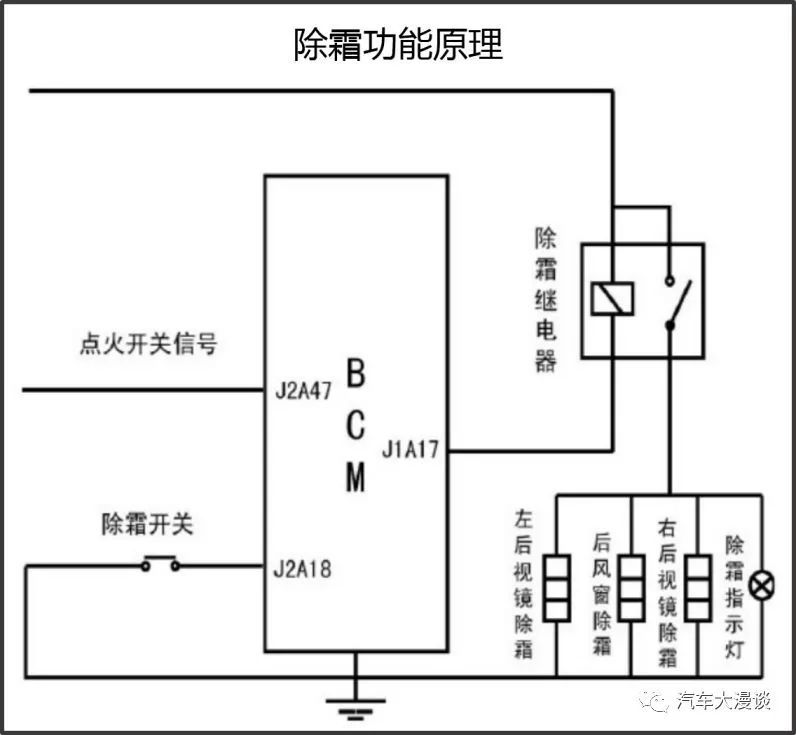
点火钥匙在ON档有效,除霜开关按下后,立即执行除霜动作,在15分钟后除霜自动关闭。如在15分钟内再次按下除霜按钮,则取消除霜功能。(1)点火开关关闭之后,如果小灯处在开启状态,则蜂鸣器响(周期1秒占空比50%),直到小灯开关关闭后,则停止报警。在钥匙未插入时,如果小灯打开,则蜂鸣器报警,当钥匙插入后,停止报警。(2)当正驾驶室的门打开时,如果钥匙插在点火锁孔上,蜂鸣器就连续报警(周期:1秒占空比:为50%),持续10秒钟后停止。当正驾驶室的门关上或拔除钥匙时,蜂鸣器停止报警。(3)点火打开且驾驶室门关闭时,如果驾驶人员没有系安全带,则蜂鸣器发出报警音,同时安全带报警灯闪烁,时间长度为6s(报警音与报警灯闪烁周期为0.6S,占空比为50%)。(4)刹车开关打开时,如果车速超过10km/h的时间超过2s,则蜂鸣器发出报警音(0.3s响,0.3s停的报警音)。直到车速为00k/m(车辆停止)后,则停止报警。
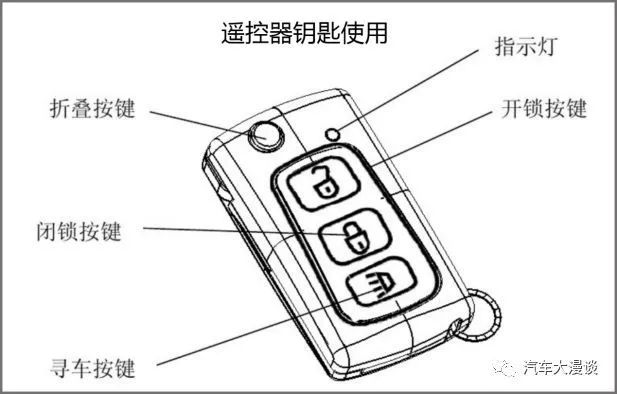
(1)遥控器采用无线遥控技术,接收和发送无方向性,使用方便,遥控距离15米;可实现遥控关窗,遥控防盗的功能。当模块断电后,会自动保存断电前设防/解防的状态,再上电后模块处于设防/解防的状态。
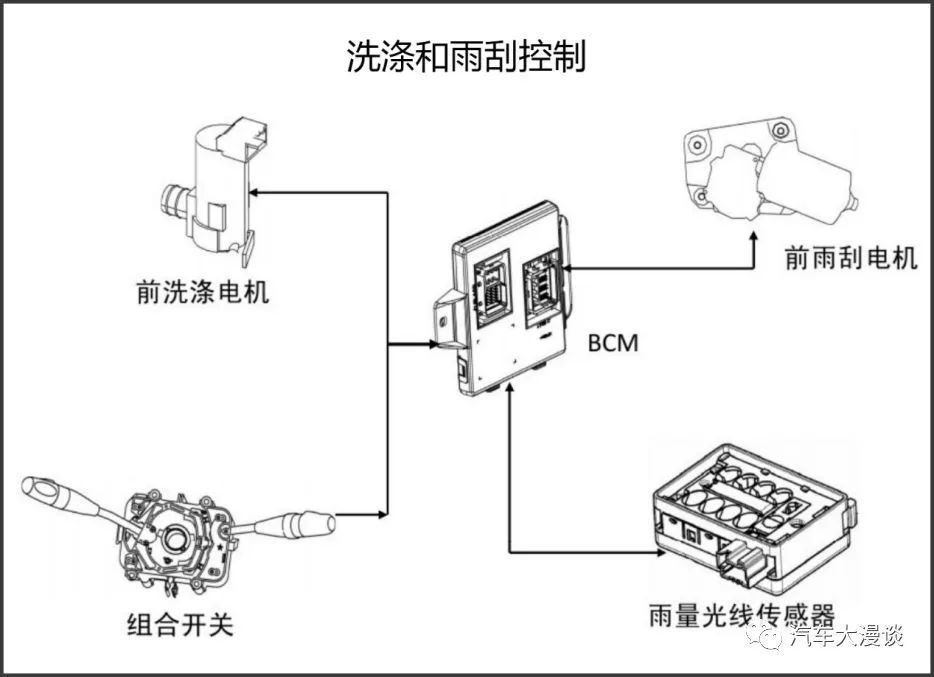
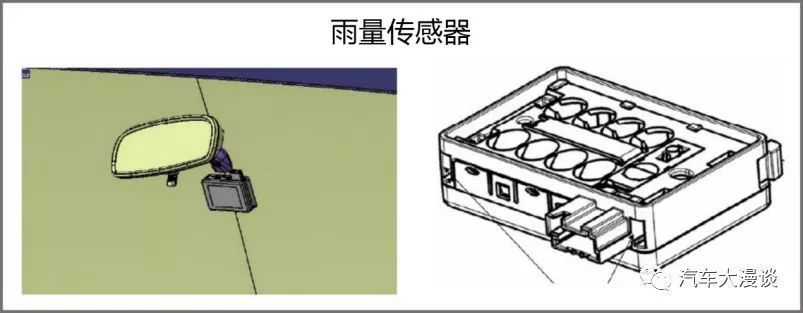
当打开洗涤开关后,如果此时雨刮处在关闭位置,则延时125,BCM控制雨刮低速运转2次,同时BCM发送LIN信号到雨量传感器,通知其当前正在洗涤状态。避免雨刮开关在自动档位时,雨量传感器发送刮水信号。雨刮开关有关闭、自动、低速和高速4个档位。在自动档位时,雨量传感器通过LN线与车身控制器连接通讯,实现雨量信号的传递。雨量传感器有3个敏感度等级,每次点火开关打开后,第一次激活自动雨刮开关,则雨量传感器设置为低灵敏度。之后每关闭打开一次自动雨刮,敏感度增加一个等级。到最高等级后,重新回到最低等级。当下一次打开点火开关后按照最低敏感度工作。
当组合开关(雨刮或灯光)至于ATUO档,RLS判断雨量大小和光照强度,发送雨刮单次刮刷、高速刮刷、低速刮刷、停止刮刷、小灯点亮、大灯点亮、小灯熄灭、大灯熄灭信号给BCM,BCM控制外围器件进行相关的动作。
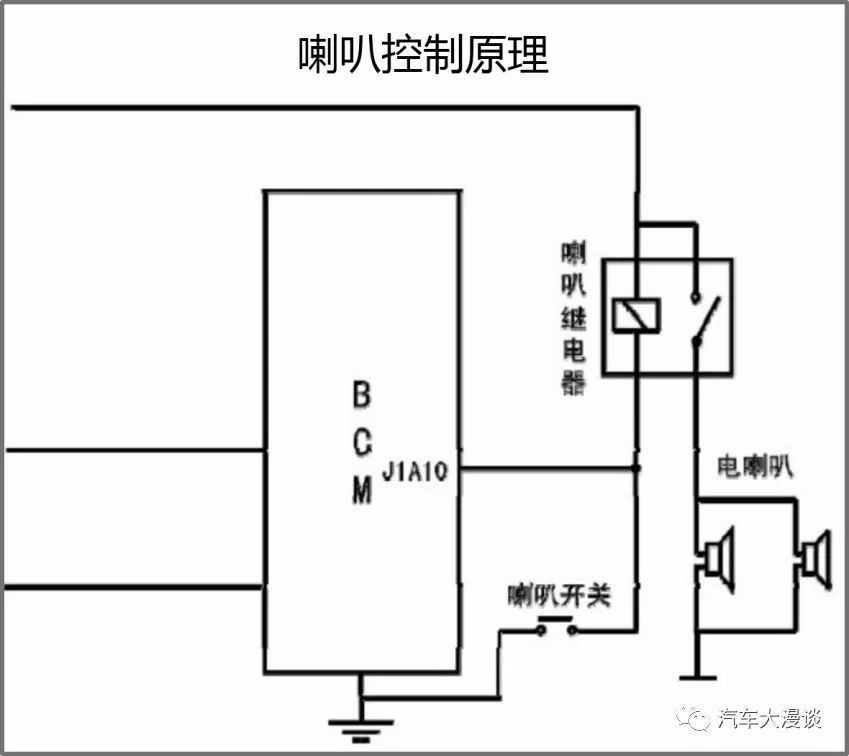
当按下喇叭开关时,BCM不在控制喇叭继电器工作。只有在寻车和防夹时BCM才会控制喇叭鸣叫。
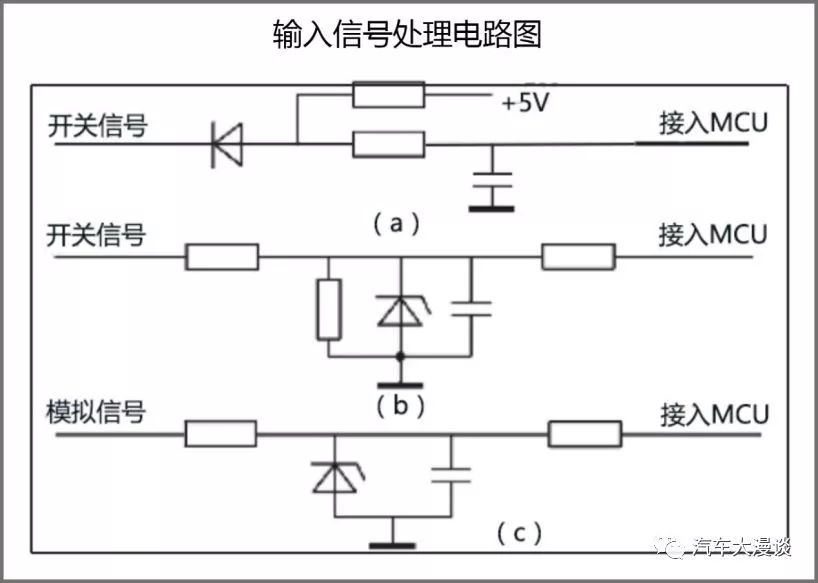
汽车BCM的输入信号有开关信号和模拟信号,开关信号的有效值有高低之分,为保证输入信号的状态稳定有效,需要对输入信号进行正确的电路处理。下面是几种推荐的处理电路:
1. 有效值为低电平的开关信号经二极管、上拉电阻、限流电阻、滤波电容处理后接入微处理器MCU,如下图a所示。2. 有效值为高电平的开关信号经分压电路、稳压管、限流电阻、滤波电容处理后接入MCU,如下图b所示。3. 一些模拟信号如AD采样电压信号,检测电阻检测到的电平信号经稳压管稳压、限流电阻、滤波电容处理后接入MCU,如下图c所示。
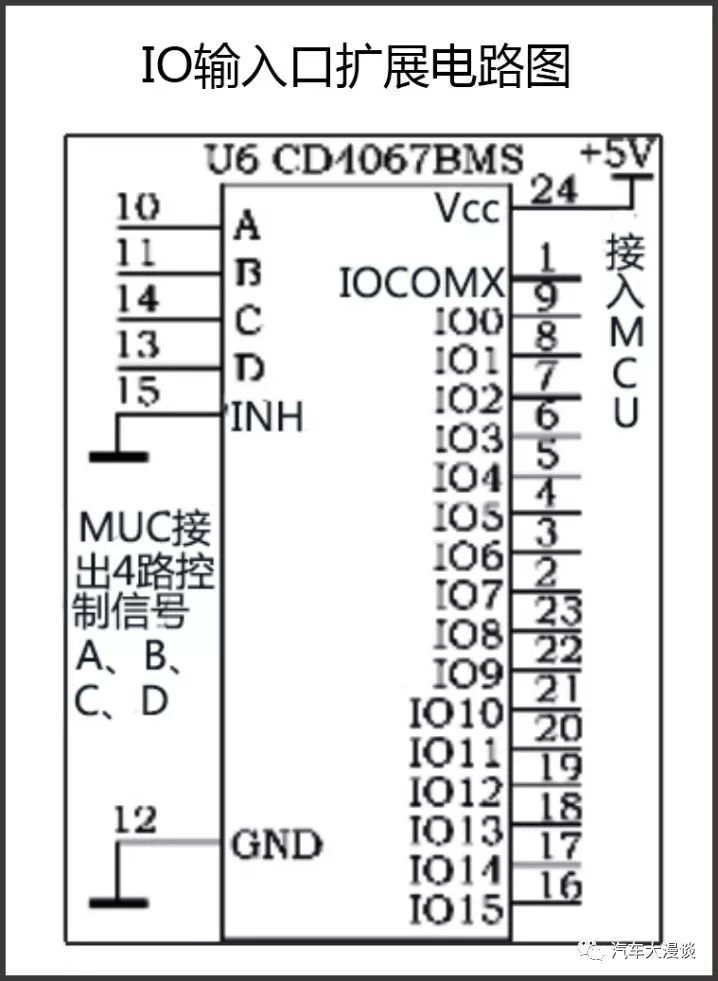
汽车上的开关信号线数量繁多,这对于MCU来说,IO口的资源显得尤为宝贵,一定情况下必须对IO口进行扩展才能满足实际的需要。下图为模拟开关CD4067的应用电路图,4路控制信号控制A、B、C、D的高低电平来选择IO0~IO15某个通道,IO0~IO15接处理过的输入信号,然后MCU检测共用端COM口的高低电平,根据该通道所接开关的高低电平有效值来判断开关是否按下,从而实现对信号开关的检测。实际中使用2片CD4067来获取更多的IO资源。
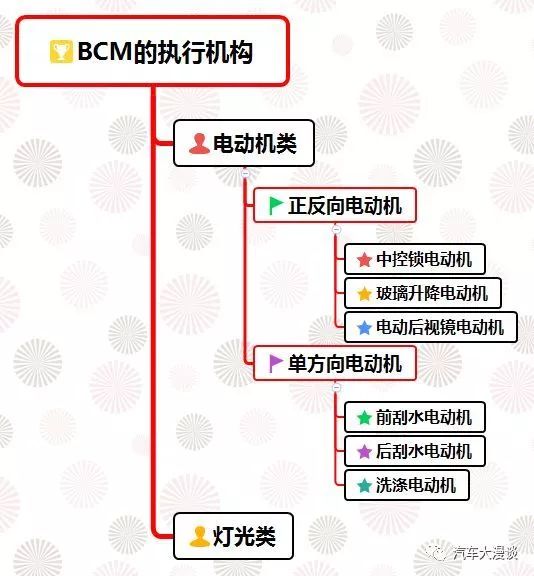
汽车BCM的执行机构大致可分为电动机类、灯光类,电动机也可分为正反向电动机、单方向电动机。正反向电动机如:中控锁电动机、玻璃升降电动机、电动后视镜电动机;单方向电动机如:前刮水电动机、后刮水电动机、洗涤电动机。
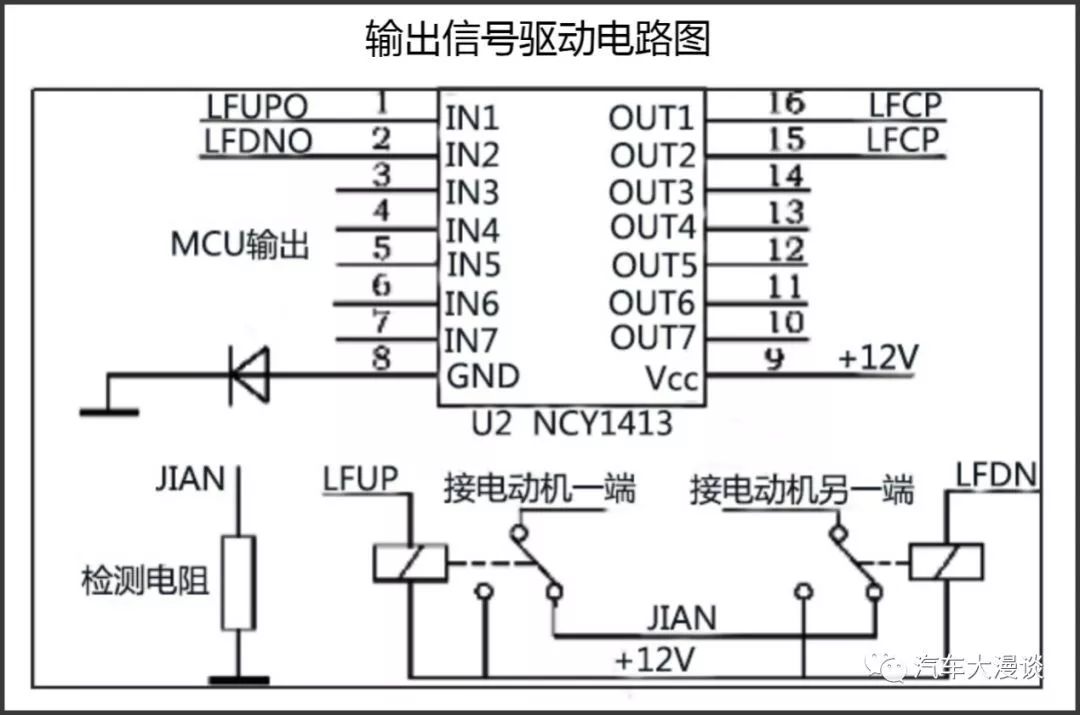
通常情况下电动机类执行机构采用继电器来控制,正反向电动机采用一双胞胎继电器来实现全桥控制;单方向电动机采用一路继电器来实现半桥控制。可用一康铜丝电阻串到电动机回路中来检测电动机的电流,根据电流的大小来判断电动机的运行状况。继电器驱动采用安森美的NCV1413,如需节省IO口,也可采用英飞凌的TLE7232G,该芯片支持SPI驱动,仅需CS、SI、SO、CLK四个IO口即可,采用带SPI模块的飞思卡尔MC9S08DZ60单片机,更能支持多个SPI驱动器件,从而实现IO输出口的扩展。
下图是NCV1413和双胞胎继电器的应用电路(如果是单路继电器,电动机的正极由继电器控制,电动机的负极接一检测电阻,这个检测电阻焊装在PCB上)。
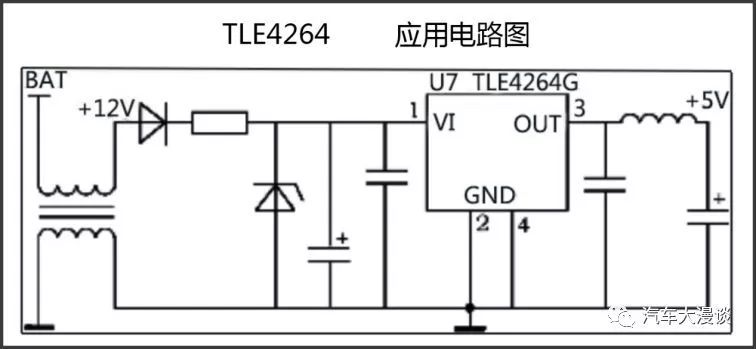
汽车BCM的电源部分包括12V/DC和5V/DC两种电源。12V电源由汽车上的电源供给,它给PCB继电器、继电器驱动芯片、高低端开关等智能功率器件供电。在电源的输入端加上共模扼流圈以防止汽车电源交流突变带来的干扰,抑制交流杂波进入12V电源。12V电源经过英飞凌的电压转换芯片TLE4264生成5V电源,它给MCU和信号处理电路供电。为使TLE4264在理想的情况下工作,在其12V输入端增加了瞬态电压抑制器和高低频滤波电容,同时为确保5V电源的稳定,在其5V输出端增加了高低频滤波电容。下图是TLE4264的应用电路。
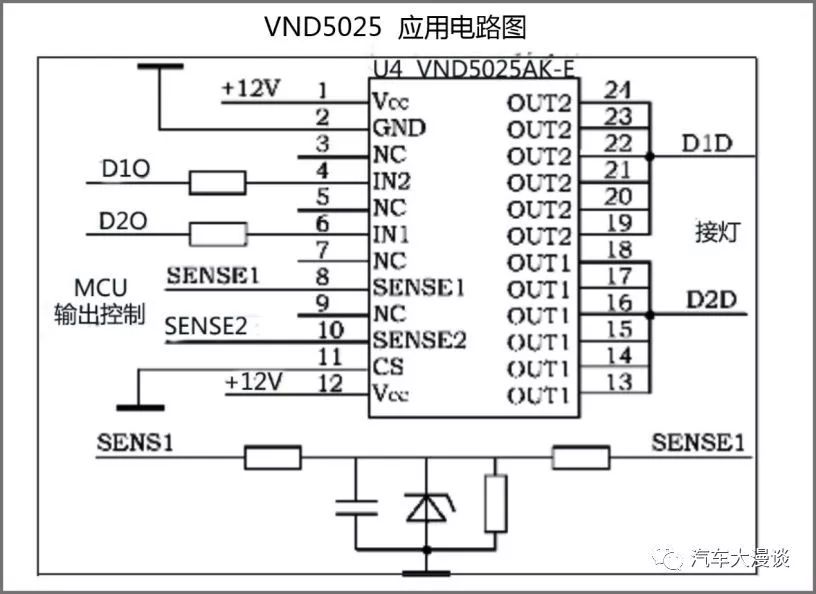
汽车BCM的灯光类执行机构驱动,笔者采用意法半导体的VND5025、VNQ5050、VNQ830、VND920等系列智能高端开关,这些功率器件有着极低的电流消耗,同时具有过载、短路、过热、过电压保护能力,并且具有电流检测能力,可根据电流的大小来判断灯光的运行状况。该系列芯片为汽车专用级,外围应用电路简单,下图是VND5025的应用电路。该系列芯片的应用要注意其PCB上的封装是否适合散热和焊装
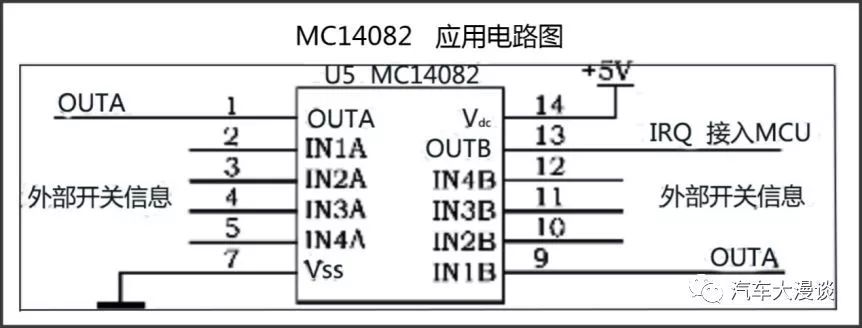
为节省汽车上宝贵的电平电量,汽车BCM在汽车静态无输出状况下应进入睡眠状态,此时汽车BCM的电路和MCU进入极低的功耗状态,MCU也处于停止模式。同时当用户要起动汽车时,一些外部开关信息应能唤醒MCU,使得BCM进入正常模式。这些能唤醒MCU的外部开关信息接到与门电路MC14082的通道IN上,MC14082的输出端OUT接到MCU的外部中断IRQ上,一旦有一路唤醒开关信息有效,则IRQ产生中断,从而唤醒MCU。下图是MC14082的应用电路。
汽车BCM在整车CAN系统网络里本身就是一个CAN节点,它要与汽车上的其它电控单元交换信息,达到资源共享的目的。BCM上需要设计CAN节点收发电路,采用飞利浦的高速CAN转换芯片TJA1040T,该芯片支持的最高速率为1MBaud,至少可连接110个CAN节点,在等待模式下有较低的电流消耗,同时可被总线唤醒,唤醒时RXCAN上会产生一低电平,这个低电平也可唤醒MCU,芯片有较好的电磁兼容性能。下图为TJA1040T的应用电路图。TXCAN、RXCAN接MCU的CAN控制器,STB1接MCU的IO口,CANH、CANL即为2条CAN线,工作时STB1为高电平,由MCU来控制。
电控单元在汽车中的应用越来越多,各电子设备间的数据通信变得越来越多,同时这些分离模块的大量使用,在提高车辆舒适性的同时也带来了成本增加、故障率上升、布线复杂等问题。需要设计功能强大的控制模块,实现这些离散的控制器功能,对众多用电器进行控制,所以这对BCM的设计、开发、验证等的要求也越来越高。尤其现在对车联网、人车“通讯”等的功能要求越来越高,这些都无形中增加了BCM开发的难度,可见BCM的设计在整车级控制器的设计中起着举足轻重的作用。





 广告
广告