




 广告
广告





















































激光雷达在无人驾驶应用中如何应对雨雾灰尘环境及经典案例分析
2021-03-04 10:57:48· 来源:智车科技 作者:fxfreefly@CSDN

本文来源:fxfreefly@CSDN / 导读 / 问题描述 激光雷达在无人驾驶应用中主要用来探测道路上的障碍物信息,然而由于激光雷达的固有特性导致激光雷达在雨雾、灰尘环境中不要用,会将雨雾、灰尘识别成障碍物。有过无人驾驶开发经验的工程师可能会体会比较深。这
本文来源:fxfreefly@CSDN
/ 导读 /
问题描述
激光雷达在无人驾驶应用中主要用来探测道路上的障碍物信息,然而由于激光雷达的固有特性导致激光雷达在雨雾、灰尘环境中不要用,会将雨雾、灰尘识别成障碍物。有过无人驾驶开发经验的工程师可能会体会比较深。这个问题的根本原因是几个雷达的光束打到雨雾、灰尘上会出现反射现象,激光雷达接收到反射的激光,则判断雨雾、灰尘为障碍物,造成误识别。雨雾、灰尘造成的误识别已经成为激光雷达应用中的难点。
可行的解决办法
(1) 采用多次回波的雷达
多次回波技术,在很多激光雷达中都有应用。多次回波指的是激光雷达发射的光束打到一些物体上会发生反射和透射,透射的光再遇到物体还会发生反射,这样激光雷达发射一束光就不只接收到一次反射光,而是接收到多次反射光,采用相应的算法对多次发射光进行处理,就是多次回波技术。最常见的处理方法就是采用最后一次回波,如果在雨雾、灰尘环境中,激光可以穿透雨雾、灰尘,并最终打到障碍物上,并反射,采用最后一次回波就可以把雨雾、灰尘滤除掉。当然多次回波的作用是有限的如果雨雾、灰尘很大,激光完全穿透不了,依然会造成误识别。
(2) 采用面激光雷达
对于线激光雷达来说,发射光是一个细小的光束,很容易受到雨雾、灰尘的影响,如果光束的路径上正好有雨滴、灰尘颗粒等就会直接被反射回来,造成误识别。而采用面激光,受雨雾、灰尘干扰的概率就会低很多,这是因为光束变的粗大了,雨滴、灰尘颗粒等只是发射了一小部分激光,如果加入发射激光强度的判断,就可以将雨滴、灰尘颗粒等的干扰滤除掉。目前,FLASH结构的激光雷达采用的就是面激光的形式。
(3) 采用感知融合
采用感知融合也是解决激光雷达误识别的有效方法。在感知系统中采用多种传感器,用其他传感器的识别结果来弥补激光雷达的缺陷是可行的。例如:采用毫米波雷达。毫米波雷达与激光雷达不同,毫米波穿透雨雾、灰尘的能力很强,几乎不受雨雾、灰尘的影响。对毫米波雷达的识别结果与机构雷达的识别结果进行融合,也可以有效滤除雨雾、灰尘造成的误识别。
经典案例分析
在这里,我们举一个知名企业的实例进行分析,看看这个企业是如何应对雨雾、灰尘的环境的。这个企业的业务中,包括矿山、农业无人驾驶的应用。在这两种环境中,灰尘是经常存在的。所以要保证感知正确无误首先要解决灰尘对激光雷达的影响,设计了一个如下图所示的激光雷达机构。

这是一个带转台的单线激光雷达,激光雷达用的是某知名雷达厂商生产的单线激光雷达,雷达的后边设计了一个转台,工作时,激光雷达在转台上旋转。
首先我们来看一下这个激光雷达,查阅这个雷达的手册发现这个雷达虽然是单线的激光雷达,但是它的性能异常强大。它采用了5次回波技术,如下图所示。这么多次回波,造成的结果就是这个激光雷达可以穿透很多干扰因素,并最终打到真实的障碍物上。从而可以最大限度减小雨雾、灰尘等造成的误识别。
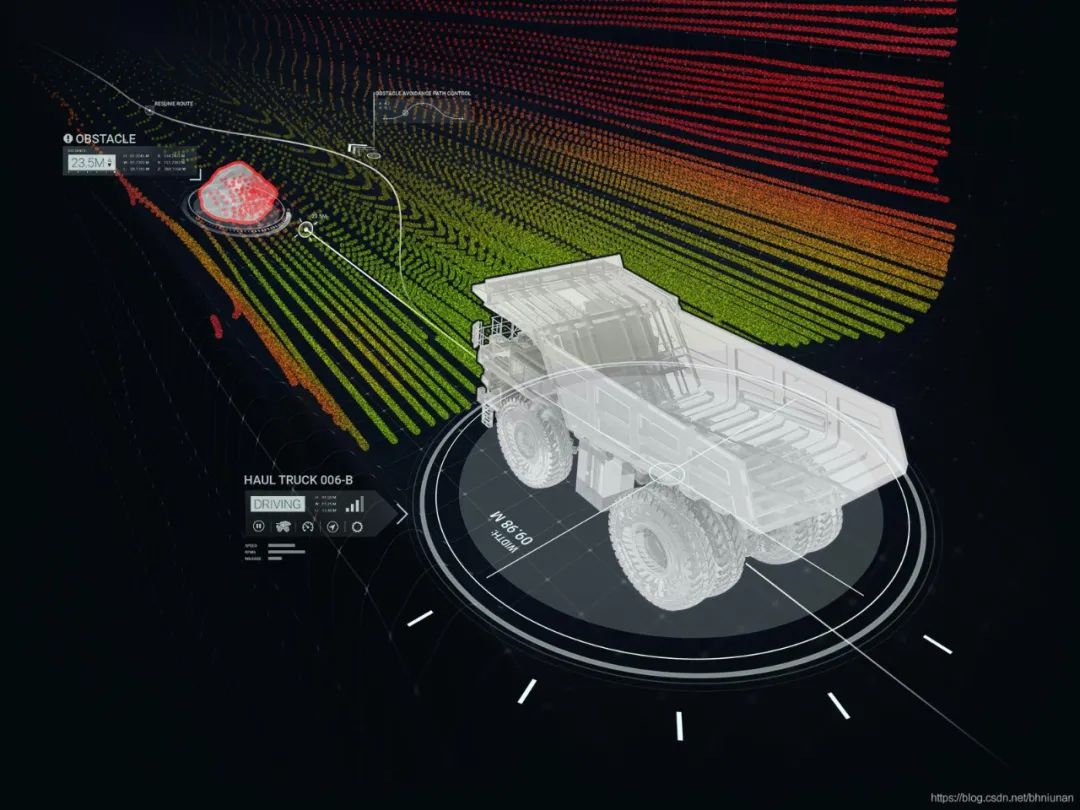
这个雷达的输出频率也异常高,可以达到100Hz。也就是说一秒钟可以输出100幅单线的点云。这一点是这个方案可以实现的前提。在雷达的后方设计一个转台,雷达在转台的带动下旋转。虽然雷达本身是单线的,但由于雷达本身又是旋转的,所以可以形成一个立体空间的点云。如果转台的旋转频率为1转/秒,则0.5秒可以生成一幅100线的点云。最终生成的点云效果如下所示。
这个方案,可以说是吧激光雷达用到了极致。通过一个单线激光雷达,生成了一个很密集的点云,并且可以很大限度滤除雨雾、灰尘的影响。
————————————————
版权声明:本文为CSDN博主「fxfreefly」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/bhniunan/article/details/105065618



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
